【OpenCv 4 Python 3.7】对象测量(面积,周长,质心,边界框等)
opencv 对象测量
1、 opencv 中轮廓特征包括:
如面积,周长,质心,边界框等
*弧长与面积测量
*多边形拟合
*获取轮廓的多边形拟合结果
2、python-opencv API提供方法:
cv2.moments() 用来计算图像中的中心矩(最高到三阶),
cv2.HuMoments() 用于由中心矩计算Hu矩,同时配合函数cv2.contourArea()函数计算轮廓面积,和cv2.arcLength()来计算轮廓或曲线长度
*cv.approxPolyDP(多边形逼近)
-contour
-epsilon 越小越折 线越逼近真实形状
-close 是否为闭合区域
函数cv2.boundingRect返回四个参数(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高。 函数cv2.rectangle是绘制矩形函数
函数cv2.minAreaRect返回的是一个 Box2D 结构,
其中包含 :矩形左上角角点的坐标(x,y),矩形的宽和高(w,h),以及旋转角度。
但是要绘制这个矩形需要矩形的 4 个角点,可以通过函数 cv2.boxPoints() 获得,最后绘制得到旋转边界矩形。
函数cv2.minEnclosingCircle可以帮我们找到一个对象的外切圆。它是所有能够完全包括对象的圆中面积最小的一个。
函数cv2.fitEllipse返回值其实就是旋转边界矩形的内切圆
3、几何矩计算
一幅M×N的数字图像ƒ(i,j),其p+q阶 几何矩mpq 和 中心矩 μpq为:
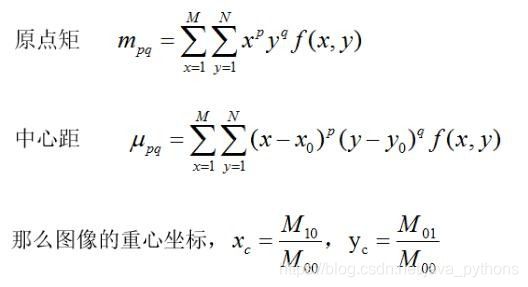
其中
p+q = 0 为0阶矩
p+q = 1 为1阶矩
p+q = 2 为2阶矩
其中ƒ(i,j)为图像在坐标点(i,j)处的灰度值
代码实现:
import cv2 as cv
import numpy as np
#对象测量
def measure_object(image):
#灰度图像
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
#二值化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
print("threshold value : %s"%ret)
cv.imshow("binary image", binary)
dst = cv.cvtColor(binary, cv.COLOR_GRAY2BGR)
#轮廓检测
contours, hireachy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for i, contour in enumerate(contours):
#求取轮廓的面积
area = cv.contourArea(contour)
#得到轮廓的外接矩形
x, y, w, h = cv.boundingRect(contour)
#求出宽高比
rate = min(w, h)/max(w, h)
print("rectangle rate : %s"%rate)
#求取几何矩
mm = cv.moments(contour)
print(type(mm)) #mm:字典类型
#得到中心位置
cx = mm['m10']/mm['m00']
cy = mm['m01']/mm['m00']
#绘制圆
cv.circle(dst, (np.int(cx), np.int(cy)), 3, (0, 255, 255), -1)
#对每个轮廓绘制外接矩形
#cv.rectangle(dst, (x, y), (x+w, y+h), (0, 0, 255), 2)
print("contour area %s"%area)
#多边形逼近, True:表示闭合
approxCurve = cv.approxPolyDP(contour,4, True)
print(approxCurve.shape)
if approxCurve.shape[0] > 6:
#画在二值化图像上
cv.drawContours(dst, contours, i, (0, 255, 0), 2)
if approxCurve.shape[0] == 4:
cv.drawContours(dst, contours, i, (0, 0, 255), 2)
if approxCurve.shape[0] == 3:
cv.drawContours(dst, contours, i, (255, 0, 0), 2)
if approxCurve.shape[0] == 6:
cv.drawContours(dst, contours, i, (100, 0, 100), 2)
cv.imshow("measure-contours", dst)
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("D:/vcprojects/images/blob.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
measure_object(src)
cv.waitKey(0)
cv.destroyAllWindows()
处理结果;
