C/C++排序算法(三)—— 冒泡排序和快速排序
文章目录
- 前言
- 1. 冒泡排序
-
- 基本思想
- 图解冒泡
- 动图演示
- 代码实现
- 代码优化
- 特性总结
- 2. 快速排序
-
- hoare 版本
-
- 图解过程
- 动图演示
- 代码实现
- 特性总结
- 挖坑法
-
- 图解过程
- 动图演示
- 代码实现
- 特性总结
- 前后指针法
-
- 图解过程
- 动图演示
- 代码实现
- 特性总结
- 快速排序的优化
-
- 三数取中
- 小区间优化
- 非递归实现
-
- 代码实现
- 特性总结
- 3. 总结
前言
本篇文章将带领大家学习 冒泡排序 和 快速排序,它俩都属于交换排序。
1. 冒泡排序
基本思想
冒泡排序的英文Bubble Sort,是一种最基础的交换排序。
大家一定都喝过汽水,汽水中常常有许多小小的气泡,哗啦哗啦飘到上面来。这是因为组成小气泡的二氧化碳比水要轻,所以小气泡可以一点一点向上浮动。
而我们的冒泡排序之所以叫做冒泡排序,正是因为这种排序算法的每一个元素都可以像小气泡一样,根据自身大小,一点一点向着数组的一侧移动。
图解冒泡
假设有下面一组无序数组,我们要对它进行升序排序,具体实现过程如下:

第一趟冒泡排序的过程
按照冒泡排序的思想,我们要把相邻的元素两两比较,根据大小来交换元素的位置,过程如下:
首先让 6 和 9 比较,发现 6 比 9 要小,因此元素位置不变。
接下来让 9 和 7 比较,发现 9 比 7 要大,所以 9 和 7 交换位置。

继续让 9 和 4 比较,发现 9 比 4 要大,所以 9 和 4 交换位置。

继续让 9 和 10 比较,发现 9 比 10 要小,所以元素位置不变。
接下来让 10 和 3 比较,发现 10 比 3 要大,所以 10 和 3 交换位置。
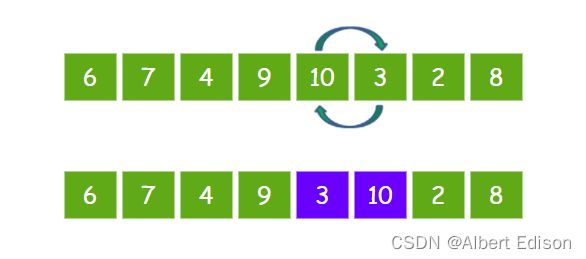
接下来让 10 和 2 比较,发现 10 比 2 要大,所以 10 和 2 交换位置。

最后让 10 和 8 比较,发现 10 比 8 要大,所以 10 和 8 交换位置。
这样一来,元素 10 作为数列的最大元素,就像是汽水里的小气泡一样漂啊漂,漂到了最右侧。
这时候,我们的冒泡排序的第一轮结束了。数列最右侧的元素 10 可以认为是一个有序区域,有序区域目前只有一个元素。

第二趟冒泡排序的过程
下面,让我们来进行第二轮排序:
首先让 6 和 7 比较,发现 6 比 7 要小,因此元素位置不变。
接下来让 7 和 4 比较,发现 7 比 4 要大,所以 7 和 4 交换位置。

继续让 7 和 9 比较,发现 7 比 9 要小,因此元素位置不变。
接下来让 9 和 3 比较,发现 9 比 3 要大,所以 9 和 3 交换位置。

接下来让 9 和 2 比较,发现 9 比 2 要大,所以 9 和 2 交换位置。
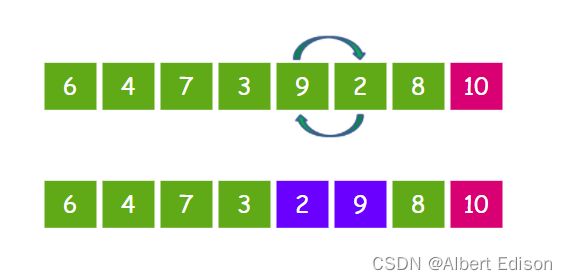
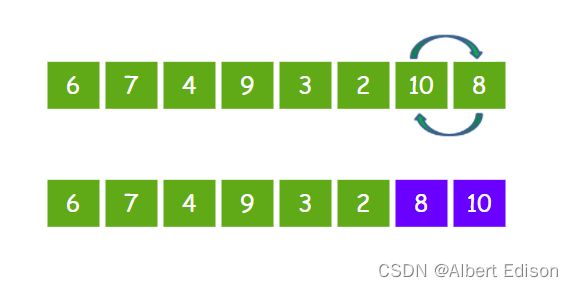
继续让 9 和 8 比较,发现 9 比 8 要大,所以 9 和 8 交换位置。

第二轮排序结束后,我们数列右侧的有序区有了两个元素,顺序如下:

第三趟冒泡排序的过程
按照以上步骤,第三轮过后的状态如下:

第四趟冒泡排序的过程
第四轮过后状态如下:

第五趟冒泡排序的过程
第五轮过后状态如下:

第六趟冒泡排序的过程
第六轮过后状态如下:

第七趟冒泡排序的过程
第七轮过后状态如下(已经是有序了,所以没有改变):

第八趟冒泡排序的过程
第八轮过后状态如下(同样没有改变):

到此为止,所有元素都是有序的了,这就是冒泡排序的整体思路。
动图演示
清楚了冒泡排序的过程,我们再来看一个动态图
代码实现
代码示例
//交换函数
void Swap(int* pa, int* pb) {
int tmp = *pa;
*pa = *pb;
*pb = tmp;
}
//冒泡排序
void BubbleSort(int* a, int n) {
for (int j = 0; j < n; ++j) {
//单趟
for (int i = 1; i < n - j; ++i) {
//前一个数大于后一个数,就交换
if (a[i - 1] > a[i]) {
Swap(&a[i - 1], &a[i]);
}
}
}
}
代码优化
让我们回顾一下刚才描述的排序细节,仍然以 6,9,7,4,10,3,2,8 这个数组为例;
当排序算法分别执行到第六、第七、第八轮的时候,数列状态如下:

很明显可以看出,自从经过第六轮排序,整个数列已然是有序的了。可是我们的排序算法仍然 “兢兢业业” 地继续执行第七轮、第八轮。
这种情况下,如果我们能判断出数列已经有序,并且做出标记,剩下的几轮排序就可以不必执行,提早结束工作。
优化的思路是:如果能判断出数列已经是有序的了,并且做出标记,那么就不会执行多余的排序。
因此,我们进行一个优化的方法:就是设置一个 flag
如果在本轮排序中有元素进行交换,则说明数列无序,如果已经排序了那么设置为 0;
如果在本轮排序中,没有元素进行交换,则说明数列有序,那么设置为 1。
代码升级
//交换函数
void Swap(int* pa, int* pb) {
int tmp = *pa;
*pa = *pb;
*pb = tmp;
}
void BubbleSort(int* a, int n) {
for (int j = 0; j < n; ++j) {
int flag = 0; //记录该趟冒泡排序是否进行过交换
//单趟
for (int i = 1; i < n - j; ++i) {
//前一个数大于后一个数,就交换
if (a[i - 1] > a[i]) {
flag = 1;
Swap(&a[i - 1], &a[i]);
}
}
if (0 == flag) { //该趟冒泡排序没有进行过交换,已有序
break;
}
}
}
特性总结
(1)冒泡排序是一种非常容易理解的排序
(2)时间复杂度: O ( N 2 ) O(N^2) O(N2)
(3)空间复杂度: O ( 1 ) O(1) O(1)
(4)稳定性:稳定
2. 快速排序
快速排序是 Hoare 于 1962年 提出的一种二叉树结构的交换排序方法。
其基本思想为:任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
将区间按照基准值划分为左右两半部分的常见方式有:
(1)hoare 版本
(2)挖坑法
(3)前后指针法
hoare 版本
Hoare 版本的单趟排序的基本步骤如下:
1)选出一个 key,一般是最左边或是最右边的指。
2)定义一个 L 指向最左边的位置,定义一个 R 指向最右边的位置,L 从左向右走,R 从右向左走。(需要注意的是:若选择最左边的数据作为 key,则需要 R 先走;若选择最右边的数据作为 key,则需要 L 先走)。
3)我们以选取最左边的值作为 key 为例子,那么 R 先走,在走的过程中,若 R 遇到小于 key 的数,则停下,L 开始走,直到 L 遇到一个大于 key 的数时,将 L 和 R 的内容交换,R 再次开始走,如此进行下去,直到 L 和 R 最终相遇,此时将相遇点的内容与 key 交换即可。
经过一次单趟排序,最终使得 key 左边的数据全部都小于 key,key 右边的数据全部都大于 key。
这个方法的精华在于:单趟排完以后,key 已经放在正确的位置,那么左边有序,右边有序,那么我们整体就有序了
图解过程
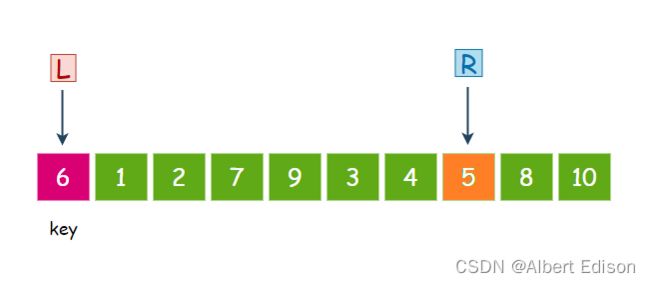
假设我们有下面这样一组无序数组,我们选择最左边的值作为 key,然后 L 指向最左边,R 指向最右边:

第一趟排序
首先,R 先走,从右往左找比 key 小的值,第一个数 10 大于 6,继续走。
第二个数 8 大于 6,继续走。
第三个数 5 小于 6,那么就停下来
此时,L 开始走,从左往右找比 key 大的值,第一个数 1 小于 6,继续走。
第二个数,2 小于 6,继续走。
第三个数,7 大于 6,那么就停下来。
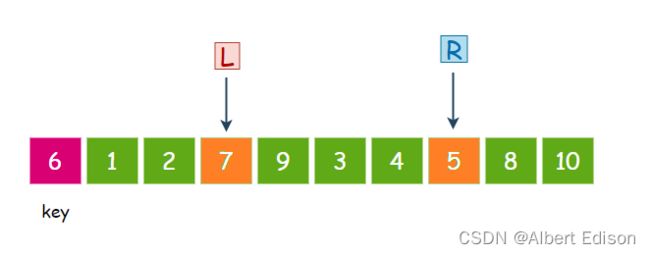
此时交换 L 和 R 指向的内容,也就是 5 和 7 交换:

此时,R 再次移动,继续找比 key 小的值,4 小于 6,那么 R 就停下来:
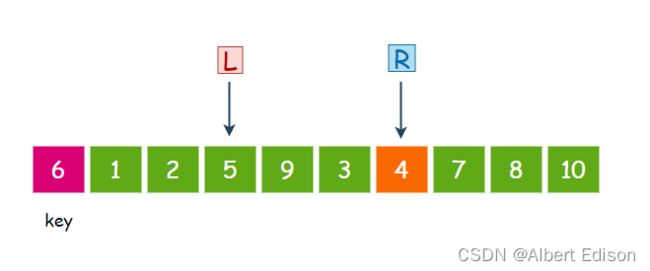
接着,L 再次移动,找比 key 大的值,9 大于 6,那么 L 就停下来:
此时交换 L 和 R 指向的内容,也就是 4 和 9 交换:

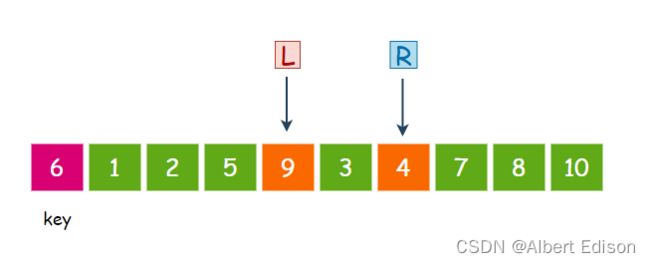
然后,R 再次移动,继续找比 key 小的值,3 小于 6,那么 R 就停下来:
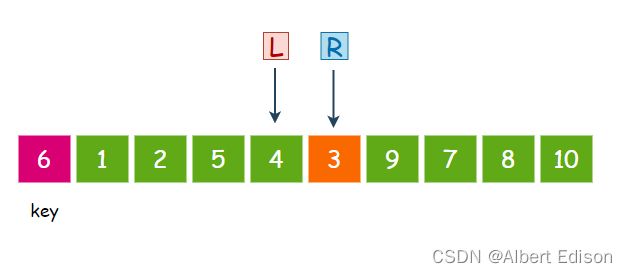
接着,L 再次移动,找比 key 大的值,注意,此时 L 向后走了一步以后,就和 R 相遇了
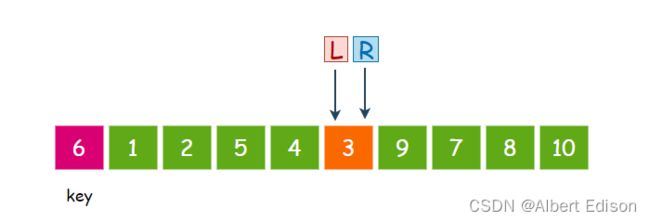
此时,直接把相遇位置的值和 key 交换,然后我们可以发现,这一趟排序完成以后,6 已经回到了正确的位置上!

然后我们再将 key 的左序列和右序列再次进行这种单趟排序,如此反复操作下去,直到左右序列只有一个数据,或是左右序列不存在时,便停止操作,因为这种序列可以认为是有序的。
动图演示
清楚了单趟 hoare 排序的过程,我们再来看一个动态图
代码实现
代码示例
/*
* 快速排序(hoare版本)
* 1.左边做key,那么右边先走
* 2.右边做key,那么左边先走
*
* 单趟排完以后,key已经放在正确的位置
* 如果左边有序,右边有序,那么我们整体就有序了
* 那么左边和右边如何有序呢/
* 用分治的思想来解决子问题
*/
//交换函数
void Swap(int* pa, int* pb) {
int tmp = *pa;
*pa = *pb;
*pb = tmp;
}
//hoare单趟排序 --- 左边做key
int PartSort1(int* a, int left, int right) {
int keyi = left; //左边做key,保存的是key的下标
while (left < right) {
//右边先走,找小
//为什么用等于呢?如果keyi和right位置的值相等,那么就会出现死循环
//为什么要加一个 left
while (left < right && a[right] >= a[keyi]) {
--right;
}
//左边后走,找大
while (left < right && a[left] <= a[keyi]) {
++left;
}
//然后交换左右
Swap(&a[left], &a[right]);
}
//当left == right的时候,跳出循环,交换和keyi的值
Swap(&a[keyi], &a[left]);
//返回相遇位置的下标
return left;
}
//快速排序递归实现的主框架
void QuickSort1(int* a, int begin, int end) {
//子区间相等只有一个值,或者不存在,那么就是递归结束的子问题
if (begin >= end) {
return;
}
int keyi = PartSort1(a, begin, end);
//递归左区间 [begin, keyi-1]
QuickSort1(a, begin, keyi - 1);
//递归右区间 [keyi+1, end]
QuickSort1(a, keyi + 1, end);
}
//测试函数
int main()
{
//创建数组
int array[10] = { 9,1,2,5,7,4,8,6,3,10 };
int sz = sizeof(array) / sizeof(array[0]);
//快速排序-hoare版本
QuickSort1(array, 0, sz - 1);
return 0;
}
特性总结
时间复杂度: O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
挖坑法
挖坑法的单趟排序的基本步骤如下:
1)选出一个数据(一般是最左边或是最右边的)存放在 key 变量中,在该数据位置形成一个坑。
2)定义一个 L 指向最左边的位置,定义一个 R 指向最右边的位置,L 从左向右走,R 从右向左走(若在最左边挖坑,则需要 R 先走;若在最右边挖坑,则需要 L 先走)。
3)假设我们这里选取最左边的作为坑位,那么就是 R 先走,在走的过程中,若 R 遇到小于 key 的数,则将该数放入坑位,并在此处形成一个坑位,这时 L 再向后走,若遇到大于 key 的数,则将其放入坑位,又形成一个坑位,如此循环下去,直到最终 L 和 R 相遇,这时将 key 放入坑位即可。
经过一次单趟排序,最终也使得 key 左边的数据全部都小于 key,key 右边的数据全部都大于key。
挖坑法相比于 hoare 法,更好理解:
1)不需要理解为什么最终相遇位置比 key 小
2)不需要理解为什么左边做key,右边先走
图解过程
假设我们有下面这样一组无序数组,我们选择最左边的值把它存放到变量 key 中,然后在该位置形成一个坑位,还是 L 指向最左边,R 指向最右边:

第一趟排序
首先,R 先走,从右往左找比 key 小的值,第一个数 10 大于 6,继续走。
第二个数 8 大于 6,继续走。
第三个数 5 小于 6,停下来,把 5 扔到坑位里面去,然后在 R 位置形成新的坑位:
此时,L 开始走,从左往右找比 key 大的值,第一个数 1 小于 6,继续走。
第二个数 2 小于 6,继续走。
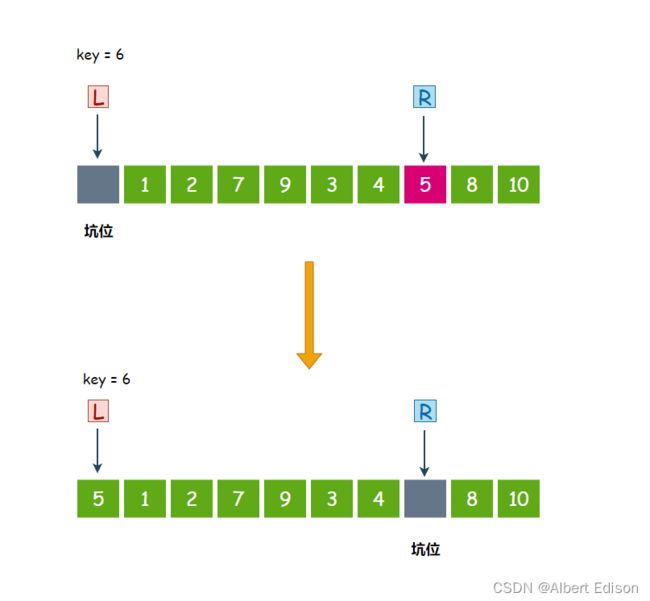
第三个数 7 大于 6,停下来,把 7 扔到坑位里面去,然后在 L 位置形成新的坑位:
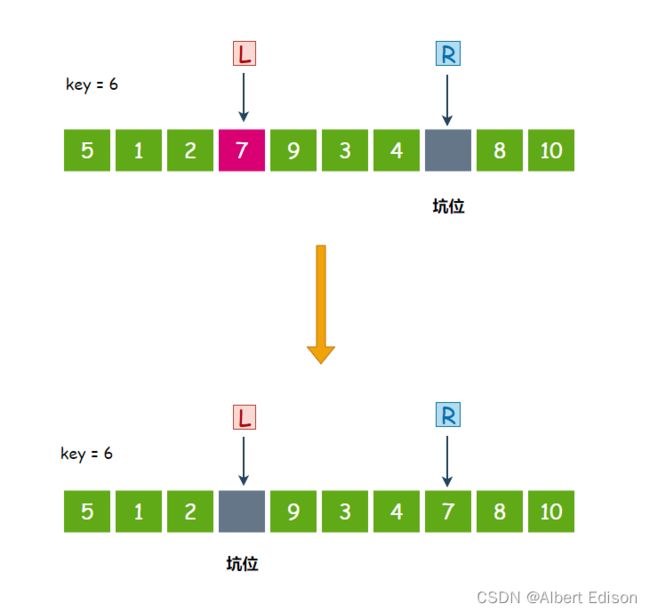
此时,R 开始走,从右往左找比 key 小的值,4 小于 6,停下来,把 4 扔到坑位里面去,然后在 R 位置形成新的坑位:

此时,L 开始走,从左往右找比 key 大的值,9 大于 6,停下来,把 9 扔到坑位里面去,然后在 L 位置形成新的坑位:
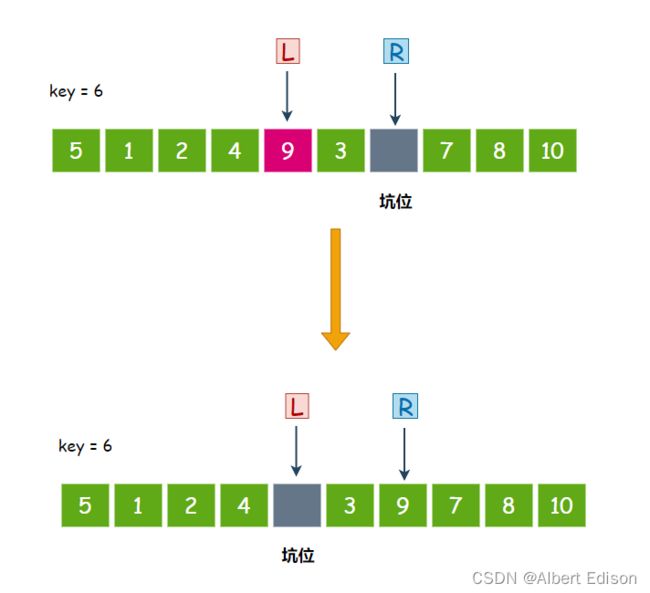
此时,R 开始走,从右往左找比 key 小的值,3 小于 6,停下来,把 3 扔到坑位里面去,然后在 R 位置形成新的坑位:

此时,L 开始向后走,走了一步以后,L 与 R 相遇了,那么直接把 key 存放的值放入该坑位中即可
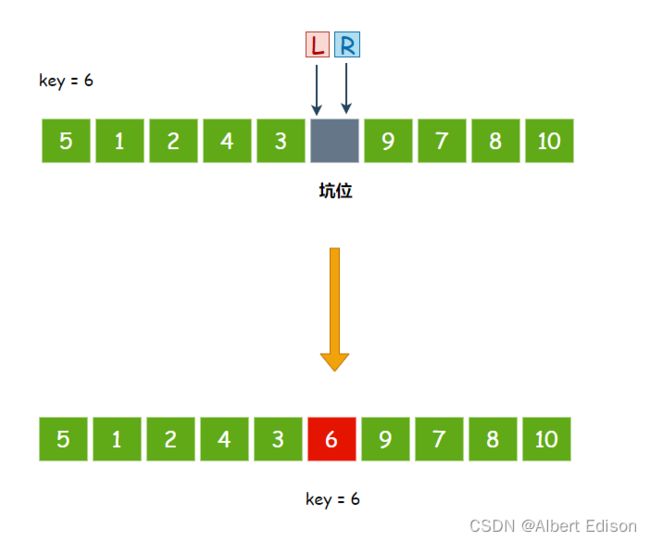
可以看到 6 已经放到了正确的位置上面。
然后也是将 key 的左序列和右序列再次进行这种单趟排序,如此反复操作下去,直到左右序列只有一个数据,或是左右序列不存在时,便停止操作。
动图演示
清楚了单趟挖坑法的过程,我们再来看一个动态图
代码实现
代码示例
//交换函数
void Swap(int* pa, int* pb) {
int tmp = *pa;
*pa = *pb;
*pb = tmp;
}
//挖坑法 --- 左边做key
int PartSort2(int* a, int left, int right) {
int key = a[left]; //保存的是key的值
int pit = left; //坑位
while (left < right) {
//右边先走,找小
while (left < right && a[right] >= key) {
--right;
}
//找到小的值以后,把小的值扔到左边的坑位上去
a[pit] = a[right];
pit = right; //此时right的位置就是新的坑位
//左边后走,找大
while (left < right && a[left] <= key) {
++left;
}
//找到大的值以后,把大的值扔到坑位上去
a[pit] = a[left];
pit = left; //此时left的位置就是新的坑位
}
//循环结束以后,说明相遇了,相遇的位置就是坑位
a[pit] = key; //把最开始保存的key放到相遇的坑位里面
return pit; //返回key的下标
}
//快速排序递归实现的主框架
void QuickSort1(int* a, int begin, int end) {
//子区间相等只有一个值,或者不存在,那么就是递归结束的子问题
if (begin >= end) {
return;
}
int keyi = PartSort2(a, begin, end);
//递归左区间 [begin, keyi-1]
QuickSort1(a, begin, keyi - 1);
//递归右区间 [keyi+1, end]
QuickSort1(a, keyi + 1, end);
}
//测试函数
int main()
{
//创建数组
int array[10] = { 9,1,2,5,7,4,8,6,3,10 };
int sz = sizeof(array) / sizeof(array[0]);
//快速排序-挖坑法
QuickSort1(array, 0, sz - 1);
return 0;
}
特性总结
时间复杂度: O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
前后指针法
前后指针法的单趟排序的基本步骤如下:
1)选出一个 key,一般是最左边或是最右边的。
2)起始时,prev 指针指向序列开头,cur 指针指向 prev+1。
3.1)若 cur 指向的内容小于 key,则 prev 先向后移动一位,然后交换 prev 和 cur 指针指向的内容,然后 cur 指针 ++;
3.2)若 cur 指向的内容大于 key,则 cur 指针直接++。如此进行下去,直到 cur 指针越界,此时将 key 和 prev 指针指向的内容交换即可。
经过一次单趟排序,最终也能使得 key 左边的数据全部都小于 key,key 右边的数据全部都大于 key。
图解过程
初始时,prev 指向数组开头,cur 指向 prev+1 的位置,选择最左边的元素作为 key:
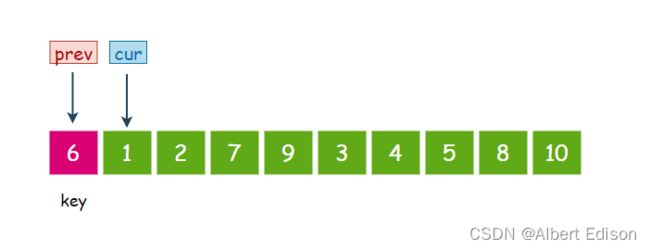
首先,cur 指向的元素是 1,小于 6,那么 prev 先往后走一步, 然后交换 prev 和 cur 指针指向的值,然后 cur 指针再往后走一步:
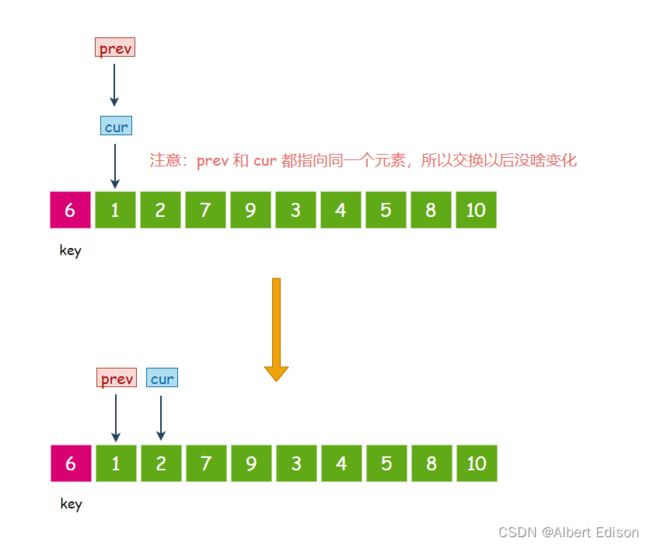
此时 cur 指向的元素是 2,小于 6,那么 prev 先往后走一步, 然后交换 prev 和 cur 指针指向的值,然后 cur 指针再往后走一步:
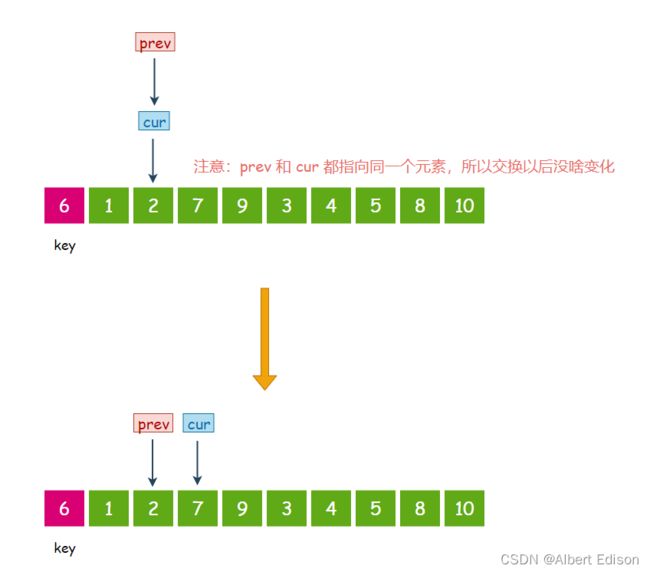
此时 cur 指向的元素是 7,大于 6,那么 cur 指针直接向后走一步,prev 指针不动。
接着 cur 又指向 9,大于 6,那么 cur 指针继续向后走一步,prev 指针还是不动。
此时 cur 指向 3,小于 6,那么 prev 先往后走一步, 然后交换 prev 和 cur 指针指向的值,然后 cur 指针再往后走一步:

此时 cur 指向 4,小于 6,那么 prev 先往后走一步, 然后交换 prev 和 cur 指针指向的值,然后 cur 指针再往后走一步:

此时 cur 指向 5,小于 6,那么 prev 先往后走一步, 然后交换 prev 和 cur 指针指向的值,然后 cur 指针再往后走一步:
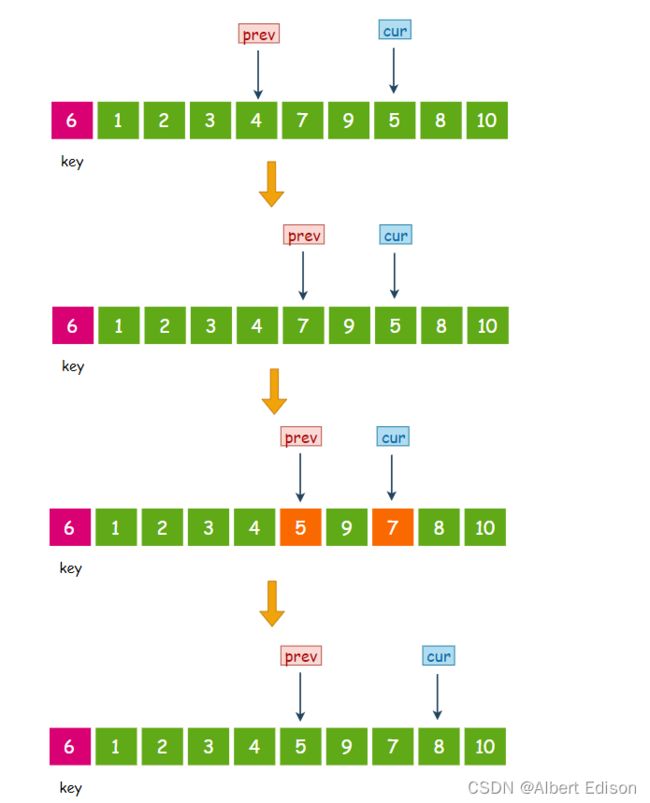
此时 cur 指向的元素 8 大于 6,那么 cur 指针直接向后走一步,prev 指针不动。
接着 cur 指向的元素 10 大于 6,那么 cur 指针直接向后走一步,prev 指针不动。
此时 cur 指针已经越界,那么我们将 prev 指向的元素 5 与 key 进行交换:
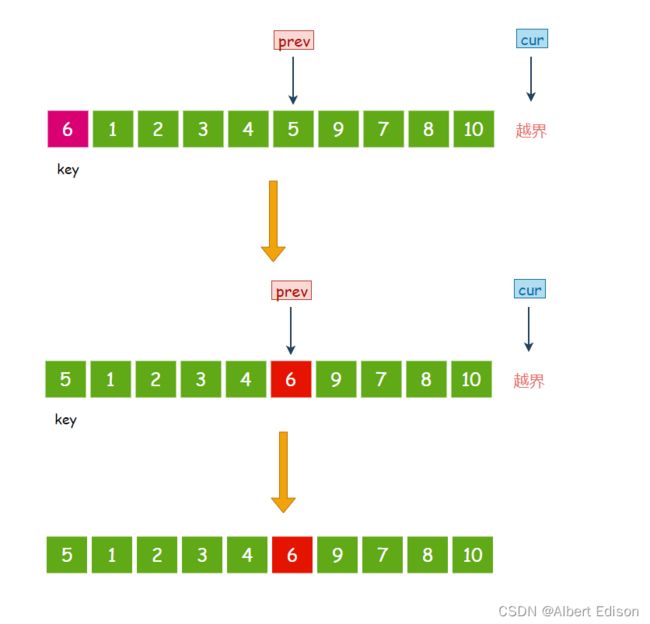
此时,元素 6 已经回到了正确的位置上面。
然后还是将 key 的左序列和右序列再次进行这种单趟排序,如此反复操作下去,直到左右序列只有一个数据,或是左右序列不存在时,便停止操作。
动图演示
清楚了前后指针法的过程,我们再来看一个动态图
代码实现
代码示例
//交换函数
void Swap(int* pa, int* pb) {
int tmp = *pa;
*pa = *pb;
*pb = tmp;
}
//前后指针法 --- 左边做key
int PartSort3(int* a, int left, int right) {
int keyi = left;
int prev = left;
int cur = left + 1;
//闭区间
while (cur <= right) {
// ++的优先级比[]高,所以先++prev
// cur遇到比key小的值以后,就++prev,如果prev和cur相等,那么就没必要交换,防止自己和自己交换
// cur遇到比key小的值以后,就++prev,如果prev不等于cur,那么就把prev和cur位置的值交换
if (a[cur] < a[keyi] && a[++prev] != a[cur]) {
Swap(&a[prev], &a[cur]);
}
++cur;
}
Swap(&a[prev], &a[keyi]);
return prev;
}
//快速排序递归实现的主框架
void QuickSort1(int* a, int begin, int end) {
//子区间相等只有一个值,或者不存在,那么就是递归结束的子问题
if (begin >= end) {
return;
}
int keyi = PartSort3(a, begin, end);
//递归左区间 [begin, keyi-1]
QuickSort1(a, begin, keyi - 1);
//递归右区间 [keyi+1, end]
QuickSort1(a, keyi + 1, end);
}
//测试函数
int main()
{
//创建数组
int array[10] = { 9,1,2,5,7,4,8,6,3,10 };
int sz = sizeof(array) / sizeof(array[0]);
//快速排序-挖坑法
QuickSort1(array, 0, sz - 1);
return 0;
}
特性总结
时间复杂度: O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
快速排序的优化
三数取中
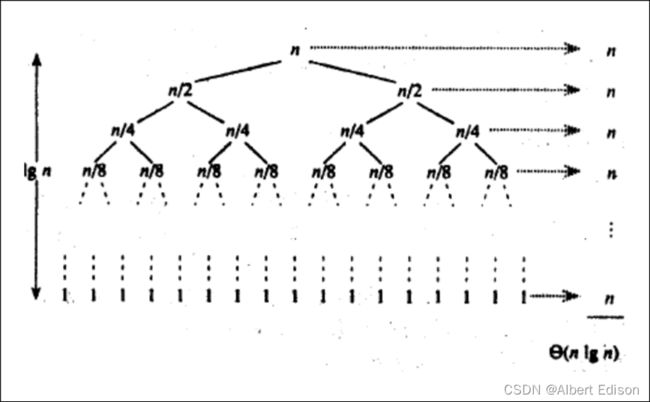
在理想情况下,我们每次进行完单趟排序后,假设 key 的左序列与右序列的长度都相同,若每趟排序所选的 key 都正好是该序列的中间值,即单趟排序结束后 key 位于序列正中间,那么快速排序的时间复杂度就是 O ( N l o g N ) O(NlogN) O(NlogN)。

可是谁能保证你每次选取的 key 都是正中间的那个数呢?
假设,当待排序列本就是一个有序的序列时,我们若是依然每次都选取最左边或是最右边的数作为 key,那么快速排序的效率将达到最低:

如上图所示,这种情况下,快速排序的时间复杂度退化为 O ( N 2 ) O(N^2) O(N2)。
其实,对快速排序效率影响最大的就是选取的 key,若选取的 key 越接近中间位置,则则效率越高。
为了避免这种极端情况的发生,于是出现了三数取中:
三数取中,当中的三数指的是:最左边的数、最右边的数以及中间位置的数。
三数取中就是取这三个数当中,值的大小居中的那个数作为该趟排序的 key。
这就确保了我们所选取的数不会是序列中的最大或是最小值了。
代码示例
//快排优化1 --- 比较最左边、最右边、最中间的三个数
//在这三个数中,去掉最大、去掉最小,选择中间的那个数
//然后把它和最左边或者最右边交换,做key
int GetMidIndex(int* a, int left, int right) {
//如果left和right特别大,可能两个数一加,超过了整型的一半,就会溢出
//所以选择移位
int mid = left + ((right - left) >> 1);
if (a[left] < a[mid]) {
if (a[mid] < a[right]) {
return mid;
}
else if (a[mid] > a[right]) {
return left;
}
else {
return right;
}
}
else { // a[left] > a[mid]
if (a[mid] > a[right]) {
return mid;
}
else if (a[left] < a[right]) {
return left;
}
else {
return right;
}
}
}
/*
* 快速排序(前后指针法)
* 左边做key
*/
int PartSort3(int* a, int left, int right) {
//三数取中找key
int midi = GetMidIndex(a, left, right);
Swap(&a[midi], &a[left]);
int keyi = left;
int prev = left;
int cur = left + 1;
//闭区间
while (cur <= right) {
// ++的优先级比[]高,所以先++prev
// cur遇到比key小的值以后,就++prev,如果prev和cur相等,那么就没必要交换,防止自己和自己交换
// cur遇到比key小的值以后,就++prev,如果prev不等于cur,那么就把prev和cur位置的值交换
if (a[cur] < a[keyi] && a[++prev] != a[cur]) {
Swap(&a[prev], &a[cur]);
}
++cur;
}
Swap(&a[prev], &a[keyi]);
return prev;
}
注意:这个三数取中函数可以放在任意一个单趟排序版本中,上面代码我是放在了前后指针法的代码中。
小区间优化
我们可以看到,就算是上面理想状态下的快速排序,也不能避免随着递归的深入,每一层的递归次数会以 2 倍的形式快速增长。
为了减少递归树的最后几层递归,我们可以在 快速排序的主体框架中 设置一个判断语句,当序列的长度小于某个数的时候就不再进行快速排序,转而使用其他种类的排序。
小区间优化若是使用得当的话,会在一定程度上 加快 快速排序的效率,而且待排序列的长度越长,该效果越明显。
代码示例
//插入排序
void InsertSort(int* a, int n) {
//数组的长度是n,那么最后一个数据是n-1,倒数第二个数据是n-2
for (int i = 0; i < n - 1; ++i) {
// [0 end]有序,把end+1的位置的值插入进去,保持它依旧有序
int end = i;
int tmp = a[end + 1];
while (end >= 0) {
if (tmp < a[end]) {
a[end + 1] = a[end];
--end;
}
else {
break;
}
}
//当end走到-1时,所有比它大的值都挪走了,所以直接放到下标为0的位置处
a[end + 1] = tmp;
}
}
/*快排优化2
* 快排递归调用展开就是一颗二叉树
* 区间很小时,不再使用递归划分的思路让他有序,而是直接使用插入排序对小区间排序,减少递归调用
*/
void QuickSort2(int* a, int begin, int end) {
//子区间相等只有一个值,或者不存在,那么就是递归结束的子问题
if (begin >= end) {
return;
}
// 小区间直接插入排序控制有序
if (end - begin + 1 <= 10) {
InsertSort(a + begin, end - begin + 1); //当长度小于等于10时,使用插入排序
}
else {
int keyi = PartSort3(a, begin, end); //这里使用的是前后指针法
//递归左区间 [begin, keyi-1]
QuickSort2(a, begin, keyi - 1);
//递归右区间 [keyi+1, end]
QuickSort2(a, keyi + 1, end);
}
}
非递归实现
上面我们使用递归实现了快速排序的主框架,可以发现与二叉树前序遍历规则非常像,所以在写递归框架时可想想二叉树前序遍历规则即可快速写出来,后序只需分析如何按照基准值来对区间中数据进行划分的方式即可。
如果在这里想把主框架改为非递归实现的话,那么需要借助前面学到的一种数据结构 栈,我们先来看一看非递归实现的思路:
1)先将待排序列的第一个元素的下标和最后一个元素的下标入栈。
2.1)当栈不为空时,读取栈中的信息(一次读取两个,一个是 L,另一个是 R),然后调用某一版本的单趟排序,排完后获得了 key 的下标,然后判断 key 的左序列和右序列是否还需要排序,若还需要排序,就将相应序列的 L 和 R 入栈;
2.2)若不需排序了(序列只有一个元素或是不存在),就不需要将该序列的信息入栈。
最好,反复执行步骤 2,直到栈为空为止。
代码实现
代码示例
//快速排序 --> 非递归
void QuickSort3(int* a, int begin, int end) {
ST st; //创建栈
StackInit(&st); //初始化栈
StackPush(&st, begin); //待排序列的L
StackPush(&st, end); //待排序列的R
while (!StackEmpty(&st))
{
int right = StackTop(&st); //读取R
STackPop(&st); //出栈
int left = StackTop(&st); //读取L
STackPop(&st); //出栈
//该处调用的是前后指针版本的单趟排序
int keyi = PartSort3(a, left, right);
//该序列的左序列还需要排序
if (left < keyi - 1) {
StackPush(&st, left); //左序列的L入栈
StackPush(&st, keyi - 1); //左序列的R入栈
}
//该序列的右序列还需要排序
if (keyi + 1 < right) {
StackPush(&st, keyi + 1); //右序列的L入栈
StackPush(&st, right); //右序列的R入栈
}
}
//销毁栈
StackDestory(&st);
}
特性总结
(1)快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
(2)时间复杂度: O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
(3)空间复杂度: O ( l o g N ) O(logN) O(logN)
(4)稳定性:不稳定
3. 总结
