实际工程中的电机选型
目录
1、概述
2、常用电机
3、步进电机
4、伺服电机
1、概述
电机选型是控制工程设计中的十分重要的环节,它涉及到选择适当类型和规格的电机以满足特定应用的需求,不同的应用需要不同类型的电机,同时负载特性、运行环境、控制需求等因素也是十分关键的。因为近期所做的项目需要,所以对电机选型进行了学习总结,顺便分享交流一下。
2、常用电机
一般来说,实际工程中电机主要分为普通电机、控制电机和直驱电机三大类
普通电机:减速电机(大力矩)、变频电机(大负载)、调速电机(精准速度控制)
控制电机:步进电机(精准控制、不需要反馈系统)、闭环步进(具有更强的控制性能,能够在动态负载或环境变化的情况下更好地保持运动的准确性)、伺服电机(高精度、高性能)
直驱电机:直流电机(成本低,控制简单)、无刷电机(高效率、长寿命)
3、步进电机


步进电机一般由机座号命名,通常机座号有20、28、35、42、57、60、86等规格,比如说42步进电机在实验室里是比较常见的,同一机座号下还有不同机身长的型号,像下面就是42步进电机的不同机身长有好几种型号。

在选型步进电机时,要特别考察保持转矩、转子惯量这两个参数,保持转矩衡量步进电机的负载能力,转子惯量影响步进电机的加减速性能,通常步进电机应用在对速度要求不高的现场,所以转子惯量一般考虑的比较少,但是保持转矩、步距角、最大同步转速这几个参数是非常关键的。
保持转矩是步进电机通电但是没有转动时定子锁住转子的转矩,一般来说步进电机通了电之后,用手是无法去转动的,这就是因为保持转矩在与你抗衡。

上面是步进电机的矩频曲线,反映转矩和转速之间的关系,从中可以看出步进电机的转矩是随着转速的提高而减小的,当低转速时对应的转矩是接近保持转矩的。最大同步转速是指能产生最大输出力矩的转速,根据定义,参考矩频曲线即可看出最大同步转速。
步距角是衡量步进电机精密指标的参数,所以在选型步进电机时要看步距角满不满足实际工况需求,满足即可,不必追求极致精准,因为要考虑成本。步进电机有两相、三相、五相,相数越高,步进角越小,控制越精确。
步距角和转速频率之间是制约关系,因此要结合项目是侧重于控制精度还是控制速度来选择合适型号的步进电机。如果对精度要求不高的控制场所,一般选择更为廉价的两相步进电机,若对控制精度有一定要求,才考虑选择三相甚至是五相步进电机。当然,步进电机的步距角还可以通过驱动器进行细分,细分后可以提高精确定位能力,减少步进电机的低速振动现象,但要注意细分功能并不能从根本上改变步进电机的精度。
下面简单讲讲工程中怎么计算所需扭矩,以四轮机器人为例,要计算机器人驱动轮所需的扭矩,通常使用扭矩=轮子半径*驱动力这个公式,在实际设计中,你可能需要考虑这些因素,并可能需要一些额外的扭矩来克服机器人在特定环境中的阻力,这就需要进行受力分析了,同时要以需要最大驱动力的情况进行受力分析。同时要注意扭矩和转速的协调,功率(kw)=n*扭矩*转速(r/min),n是常数,等于1/9550。在功率一定的条件下,转速与扭矩成反比。
4、伺服电机

伺服电机是一种能够通过闭环控制系统实现高精度、高性能运动控制的电机。它通常与伺服驱动器配对使用,形成一个闭环控制系统。
伺服电机一般分为AC和DC两种,直流伺服一般相对便宜,但是实际工程中交流伺服用的比较多。
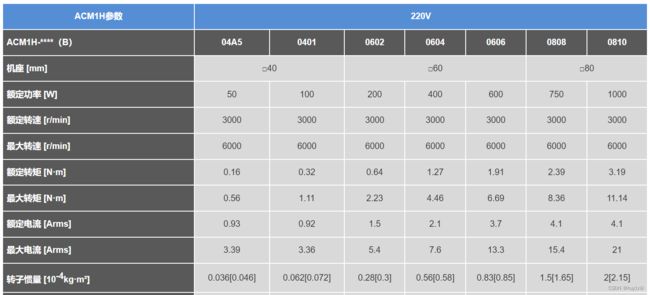
伺服电机选型时主要看额定转矩、额定转速、最大转速、转子惯量这几个参数。额定转矩一般结合负载来考虑,同时注意到伺服电机还有个最大转矩,一般最大转矩是额定转矩的三倍以上,因此伺服电机有三倍过载的特性,可以应对重负载工作下的突发情况。
下图是某款常用伺服电机的矩频曲线,从图中可以看到该伺服电机的额定转速是3000转,最大转速是6000转,这就表明该伺服电机在3000转以内都是以其额定转矩恒定输出的,3000转到6000转是恒功率输出。这就是伺服电机的典型特性,这让它用在实际工程中是及其稳定的。连续工作区就是电机按照额定力矩运行的工作情况,瞬时工作区是某些突发情况下对电机有一定过载要求时的工作情况。

为了让大家更直观的感受到伺服电机的优越性,可以将步进电机与其进行对比。
从控制精度上来说,伺服电机更优,一般高精度场合选伺服;
他两控制方式还不太一样,步进电机是开环控制,只给信号,实际走没走到位不管,开环意味着步进电机长时间运行容易发生丢步,而伺服电机是闭环控制,带有反馈,不会步。
低频特性不同,步进电机在低频时容易出现震动现象,上面讲步进电机时我也提到了这个现象,但是伺服电机不存在。
矩频曲线不同,上面讲到步进电机的矩频特性是转矩是随着转速的提高而减小,但伺服电机的矩频曲线不是这样的,伺服电机在额定转速之内是恒力矩输出,额定转速到最高转速之间恒功率输出。
伺服电机还有三倍过载能力,这是步进电机没有的。另外他两速度响应性能不同,伺服电机性能更好,特别在快速启停,频繁加减速的场所,一般首先考虑伺服电机。比如我正在做的一个项目,刚开始的方案中是选择步进电机,但考虑到机器人需要3s停一次,同时机器人重量非常大且工作环境特殊,担心步进电机在频繁启停的过程中过热或者失步,因此换了伺服,同时搭配了1:10的减速机达到需要的力矩。总的来说,伺服电机就是贵,各个方面都是优于步进电机,但是在实际工程中成本也是一个重要指标。