- C++ 设计模式:抽象工厂(Abstract Factory)
冀晓武
C++设计模式c++设计模式抽象工厂模式
链接:C++设计模式链接:C++设计模式-工厂方法链接:C++设计模式-原型模式链接:C++设计模式-建造者模式抽象工厂(AbstractFactory)是一种创建型设计模式,它提供一个接口,用于创建一系列相关或相互依赖的对象,而无需指定它们的具体类。抽象工厂模式通常用于创建一组相关的产品对象,例如不同类型的机器人和它们的配件。1.问题分析在某些情况下,我们需要创建一组相关或相互依赖的对象,但我们
- 使用 DeepSeek R1 和 Ollama 开发 RAG 系统 使用 DeepSeek R1 和 Ollama 构建强大的 RAG 系统。了解开发智能 AI 解决方案的设置过程、最佳实践和技巧。
知识大胖
NVIDIAGPU和大语言模型开发教程人工智能deepseekollama
简介DeepSeekR1和Ollama提供了用于构建检索增强生成(RAG)系统的强大工具。本指南介绍了使用这些技术开发RAG应用程序的设置、实施和最佳实践。为什么RAG系统会改变游戏规则检索增强生成(RAG)系统结合了搜索和生成AI的优点,可实现精确且准确的情境感知响应。借助DeepSeekR1和Ollama等工具,创建RAG系统不再令人生畏。无论您是构建聊天机器人、知识助手还是AI驱动的搜索引擎
- NVIDIA 系列之 使用生成式 AI 增强 ROS2 机器人技术:使用 BLIP 和 Isaac Sim 进行实时图像字幕制作
知识大胖
NVIDIAGPU和大语言模型开发教程人工智能机器人
简介在快速发展的机器人领域,集成先进的AI模型可以显著增强机器人系统的功能。在本博客中,我们将探讨如何在ROS2(机器人操作系统2)环境中利用BLIP(引导语言图像预训练)模型进行实时图像字幕制作,并使用NVIDIAIsaacSim进行模拟。我们将介绍如何实现一个ROS2节点,该节点订阅摄像头源、应用BLIP模型进行图像字幕制作,并实时显示结果。这种集成展示了生成式AI在增强人机交互方面的强大功能
- GPT实操——利用GPT创建一个应用
狗木马
深度学习gpt-3gpt
功能描述信息查询:用户可以询问各种问题,如天气、新闻、股票等,机器人会返回相关信息。任务执行:用户可以要求机器人执行一些简单的任务,如设置提醒、发送邮件等。情感支持:机器人可以与用户进行情感交流,提供安慰和支持。个性化设置:用户可以自定义机器人的回复风格和偏好。技术栈前端:React.js后端:Node.js+Express数据库:MongoDB自然语言处理:OpenAIGPT-3API其他工具:
- 车身焊接机器人系列编程:Yaskawa MA2010_(11).机器人维护与保养
zhubeibei168
机器人(二)机器人网络
机器人维护与保养1.机器人维护的必要性在汽车制造行业中,车身焊接机器人(如YaskawaMA2010)的高效运行对于生产线的稳定性和生产质量至关重要。机器人维护不仅能够延长机器人的使用寿命,还能确保其在长时间运行中的性能稳定。维护工作主要包括定期检查、清洁、润滑、更换易损件和故障诊断等。本节将详细介绍这些维护工作的具体步骤和注意事项。2.定期检查定期检查是机器人维护的基础,可以及时发现潜在问题并进
- 专题:2025供应链数智化与效率提升报告|附100+份报告PDF、原数据表汇总下载
拓端研究室
php开发语言
全文链接:https://tecdat.cn/?p=42926在全球产业链重构与数字技术革命的双重驱动下,供应链正经历从传统经验驱动向数据智能驱动的范式变革。从快消品产能区域化布局到垂类折扣企业的效率竞赛,从人形机器人的成本优化到供应链金融对中小企业的赋能,技术创新与模式重构正在重塑行业价值网络。本报告洞察基于《灼识咨询:2025中国供应链金融科技行业蓝皮书》《中国银河证券:折扣业态供应链效率深度
- Octo:伯克利开源机器人开发框架
【摘要】在各种机器人数据集上预先训练的大型策略有可能改变机器人学习:这种通用机器人策略无需从头开始训练新策略,只需使用少量领域内数据即可进行微调,但具有广泛的泛化能力。然而,为了广泛应用于各种机器人学习场景、环境和任务,这些策略需要处理不同的传感器和动作空间,适应各种常用的机器人平台,并轻松高效地微调到新领域。在这项工作中,我们旨在为开发开源、广泛适用的通用机器人操作策略奠定基础。作为第一步,我们
- 【养老机器人】核心技术
杭州队长(⁎⁍̴̛ᴗ⁍̴̛⁎)
人工智能
1.毫米波雷达如何检测心跳和呼吸?毫米波雷达(通常工作在60GHz或77GHz频段)可以探测到人体胸腔的微米级位移,而心跳和呼吸会引起胸腔的周期性运动:呼吸:幅度较大(约5-10毫米),频率较低(0.1-0.5Hz)。心跳:幅度极小(约0.1-0.5毫米),频率较高(0.8-2.5Hz)。通过分析雷达回波的相位变化,可以提取这些微动信号:调频连续波(FMCW)雷达:发射连续调频信号,接收反射信号后
- 焊接机器人结构设计cad【16张】三维图+设计说明书+绛重
v先v关v住v获v取
科技
目录摘要:7关键词:7Abstract8第1章绪论91.1选题的背景及意义91.2国内外的研究现状91.2.1国外的研究现状91.2.2国内的研究现状101.3常见的机器人抓取机构111.6本文的主要研究内容13第2章老化板抓取机器人的总体方案设计152.1设计方法和设计原则152.2总体设计思路152.2.1结构方案的选择152.2.2驱动方案的选择162.2.3传动方案的选择162.3本文的设
- Flowable24服务任务脚本任务-----------持续更新中
服务任务(ServiceTask)服务任务是BPMN2.0规范中的核心元素之一,在Flowable工作流引擎中扮演着至关重要的角色。它代表了流程中一个由系统自动执行的步骤,用于与外部世界进行交互,而无需人工干预。可以把它理解为流程中的“机器人”,专门负责执行后台代码、调用外部服务或执行任何自动化任务。1.核心概念与用途是什么?服务任务是一个自动化的活动,当流程执行到该节点时,Flowable引擎会
- 《Unitree RL Gym 从 0 到 1 全解析》宇树G1机器人rl_gym、legged_game 与 rsl_rl 开源项目 代码详解&&逻辑梳理
前言:此文将对宇树的RL_Gym进行详细介绍。为什么写这篇文章?首先对于这个项目来说,目前网上很难找到能讲明白的,其次,兼顾打工生活&知识分享需要些动力;因此,我决定推出这一篇付费文章,从纯小白视角出发,深入剖析该项目(大佬们请轻喷),这篇文章主要进行难点解析、代码分析与解释、整体的逻辑梳理。这篇付费文章耗费了我7h+的撰写,希望能为读者解开长期困扰的难题,带来启发与收获。开源项目链接:https
- 英伟达 Isaac ROS产品体验
芝麻香儿
Roadstodeeplearning.AI英伟达IsaacROS
这里写自定义目录标题英伟达IsaacROS产品体验运行的商品名称运行过程记录GPU加速仿真总结英伟达IsaacROS产品体验NVIDIAIsaacROS是一套为自主移动机器人(AMR)开发的硬件加速软件包,专为在NVIDIAGPU和Jetson平台上优化ROS(RobotOperatingSystem)应用程序而设计。它通过提供一系列模块化的ROS包和完整的处理管道,帮助开发者加速AI感知、图像处
- 2025年人工智能、虚拟现实与交互设计国际学术会议
学术小八
学术人工智能vr交互
重要信息官网:www.aivrid.com时间:2025年10月17-19日地点:中国-东莞部分介绍征稿主题包括但不限于:生物特征模式识别机器视觉专家系统深度学习智能搜索自动编程智能控制智能机器人系统组件虚拟现实平台用于VR/AR的AI平台数据和生成、操作、分析和验证浸入式环境和虚拟世界的生成优化和现实的渲染人工智能与用户体验个性化推荐系统情感计算与用户响应虚拟现实与沉浸式技术沉浸式环境设计交互设
- 全身动作捕捉系统在人形机器人训练中提供精准数据的重要性
人形机器人作为复杂的移动操作平台,其运动精度直接影响任务执行可靠性。与工业机械臂相比,人形机器人需同时处理浮动基座动力学、多体耦合误差及非结构化环境适应,使得运动学误差分析更具挑战性。传统编程式动作控制已无法满足复杂场景需求,而全身动作捕捉系统通过提供高精度运动数据,成为突破这一瓶颈的关键技术。一、技术原理:从传感器到数字孪生的精准映射1.1动作捕捉系统的技术架构全身动作捕捉系统通常由惯性传感器、
- 车身焊接机器人系列编程:Yaskawa MA2010_(9).程序调试与优化
程序调试与优化程序调试的基本方法在工业机器人编程中,程序调试是一个重要的环节,它不仅帮助我们发现和修复程序中的错误,还能确保机器人在实际生产中的稳定性和高效性。本节将详细介绍YaskawaMA2010车身焊接机器人程序调试的基本方法,包括使用调试工具、日志记录和常见错误的诊断与解决。使用调试工具YaskawaMA2010机器人配备了强大的调试工具,这些工具可以帮助我们快速定位和解决程序中的问题。以
- 2023 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(省赛)
Harold0895
算法c语言c++
2023睿抗机器人开发者大赛CAIP-编程技能赛-本科组(省赛)RC-u1亚运奖牌榜题意给定两个国家/地区的金银铜牌的获得记录,输出他们的金银铜牌的具体记录,并输出哪个国家/地区排名高思路直接读入后比较即可代码#includeusingnamespacestd;inta[5],b[5];voidsolve(){intn;cin>>n;for(inti=1;i>wh>>op;if(wh==0)a[o
- 手机FunASR识别SIM卡通话占用内存和运行性能分析
手机FunASR识别SIM卡通话占用内存和运行性能分析--本地AI电话机器人上一篇:手机无网离线使用FunASR识别SIM卡语音通话内容下一篇:手机通话语音离线ASR识别商用和优化方向一、前言书接上一文《阿里FunASR本地断网离线识别模型简析》,我们其实在2023年底的时候输出过一版基于离线FunASR的ASR转文字方案。当时为了减少模型文件的数量和大小,只引入了【vad_res】、【asr_o
- 人工智能怎么入门?零基础入门指南:从小白到AI实战者的第一步
OpenCV图像识别
人工智能人工智能计算机视觉自然语言处理神经网络机器学习
人工智能(AI)是当今最具前景的科技领域之一。从聊天机器人到自动驾驶,从图像识别到语音翻译,AI正在以前所未有的速度改变世界。但对于初学者来说,一个最常见的问题是:“我没有基础,也不是学数学或计算机的,人工智能还能学吗?我该怎么入门?”答案是:可以学,而且你并不孤单。越来越多的人正在以“跨专业、转行、自学”的方式进入AI领域。关键是,你需要一个清晰的入门路径,理解应该先做什么、学什么、避开什么误区
- VL53L0X激光测距传感器资料汇总:您的智能测距解决方案
伍熠逸Peg
VL53L0X激光测距传感器资料汇总:您的智能测距解决方案去发现同类优质开源项目:https://gitcode.com/VL53L0X激光测距传感器资料汇总项目的核心功能/场景:提供VL53L0X传感器集成、调试与开发资源,助力智能测距应用。项目介绍在现代科技领域,精确的测距能力对于自动化、机器人技术以及智能家居等应用至关重要。VL53L0X激光测距传感器资料汇总项目,就是一个为开发者提供全面资
- py_trees实践:实现机器人循迹任务
H1_Coldfire
taskplanning机器人python
书接上回的py_trees快速实践,写了一个机器人沿着拓扑路径循迹移动,最后到达目标点后,执行一个任务动作的行为树。在行为树中,增加了在每个tick检查机器人电量的逻辑。在电量低于一定阈值时,会中断当前任务并触发充电动作。这个逻辑体现了行为树响应性(Reactive)的特点,希望对学习行为树的同学有一点参考价值。下面直接给出相应的代码:#!/usr/bin/python3#coding:utf-8
- deepseek学术论文全流程深度辅助指南(从开题至答辩)
在学术论文的创作旅程中,从开题到答辩的每一个阶段都至关重要。以下为你详细介绍如何借助高效工具和技巧,顺利完成这一复杂过程。阶段一:开题攻坚操作流程精准定位研究方向:输入指令「我是机械工程专业本科学生,请推荐5个适合毕业设计的智能机器人相关课题,要求:具有创新性但不过于前沿;需要仿真实验而非实物制作;附相关参考文献查找关键词」。通过明确专业、课题类型及具体要求,为研究方向的确定奠定基础。精心优化题目
- 手机通话语音离线ASR识别商用和优化方向
limingade
本地AI电话机器人手机提取电话的信令和声音智能手机FunASR离线识别Android做ASR手机断网离线ASRASR语音转文字识别语音识别
手机通话语音离线ASR识别商用和优化方向--本地AI电话机器人上一篇:手机FunASR识别SIM卡通话占用内存和运行性能分析下一篇:编写中。一、前言前面的篇章中,我们尝试了将FunASR的ONNX模型文件加载到Android应用中,实现手机本地不依赖服务器和网络的离线ASR语音识别。并将这个ASR能力应用到了手机麦克风、手机本地的历史通话录音、手机实时的SIM卡电话通话内容的解析上。在实践中,我们
- 人工智能-基础篇-23-智能体Agent到底是什么?怎么理解?(智能体=看+想+做)
weisian151
人工智能人工智能
1、智能体是什么?想象你有一个超级聪明的小助手,它能:自己看环境(比如看到天气、听到声音、读到数据);自己做决定(比如下雨了要关窗,电量低要去充电);自己动手干活(比如帮你订外卖、打扫房间、开车);越用越聪明(比如记住你的习惯,下次不用你提醒)。这个“小助手”就是智能体(Agent)——它是一个能自主感知、思考、行动并学习的系统,可以是软件(比如手机里的AI助手)、硬件(比如机器人),或者软硬结合
- 仓库机器人效率翻倍的秘密:CAN主站+Modbus TCP的网关神操作
JIANGHONGZN
协议网关CANMODBUSTCP伺服电机工业通讯
在自动化仓库领域,货架机器人依赖伺服系统精准定位实现货物高效存取。在此场景下,JH-CAN-TCP疆鸿智能CAN主站转ModbusTCP作为从站接西门子PLC,CAN作为主站连接伺服电机,而网关在其中发挥着关键作用。网关充当通信协议转换的桥梁。一方面,它将CAN主站与伺服电机连接。CAN总线凭借高可靠性、强实时性及多主通信等优势,能快速、稳定地向伺服电机发送指令,并实时获取电机的运行状态数据,如位
- 【Arduino 动手做】DIY Arduino 机器人手臂,带智能手机控制
驴友花雕
Arduino动手做机器人智能手机嵌入式硬件单片机c++机器人手臂带智能手机控制Arduino动手做
《Arduino手册(思路与案例)》栏目介绍:在电子制作与智能控制的应用领域,本栏目涵盖了丰富的内容,包括但不限于以下主题:ArduinoBLDC、ArduinoCNC、ArduinoE-Ink、ArduinoESP32SPP、ArduinoFreeRTOS、ArduinoFOC、ArduinoGRBL、ArduinoHTTP、ArduinoHUB75、ArduinoIoTCloud、Arduin
- 人工智能在医疗领域的应用:技术革新与未来展望
人工智能(AI)技术正在重塑医疗行业的面貌。从辅助诊断到药物研发,从健康管理到手术机器人,AI的广泛应用不仅提升了医疗效率,还为精准医疗和个性化治疗提供了新可能。根据2025年多份研究报告及政策文件,全球AI医疗市场正以39.4%的年复合增长率高速扩张,预计到2025年,中国市场规模将达349亿元,全球规模则可能突破千亿美元18。本文将从应用场景、技术驱动、挑战与政策支持等维度,探讨AI在医疗领域
- 机器人运动学
AugustInSopton
机器人
1.髋关节(3个自由度)(1)运动学必要性#髋关节自由度:yaw,roll,pitchhip_dofs=["l_hip_yaw","l_hip_roll","l_hip_pitch"]三维空间定位:髋关节是腿部与躯干的连接点,需要完成以下动作:Yaw(偏航):左右摆动(如犬类转弯时)Pitch(俯仰):上下摆动(如跨越障碍物)Roll(滚转):抗侧向力(如斜坡行走时的姿态调整)运动范围示例(以波士
- “解锁自动化新可能:使用Robocorp构建Python机器人“
sjufgwgfhoia
自动化python服务器
在这个快速变化的技术时代,自动化已经成为提高生产力和效率的关键驱动力。Robocorp提供了一种强大且灵活的平台,帮助开发者构建和运行Python机器人,以满足各类业务需求。引言在本文中,我们将深入探讨如何使用Robocorp构建和操作可以运行在任何地方且具备任意规模的Python工作器。本文旨在帮助你快速上手Robocorp平台的安装和设置,并分享如何在实践中应用它。主要内容1.Robocorp
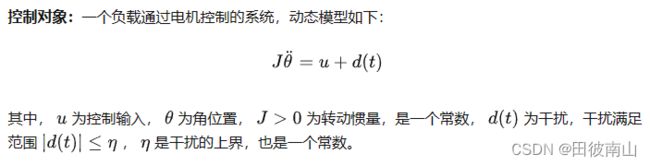
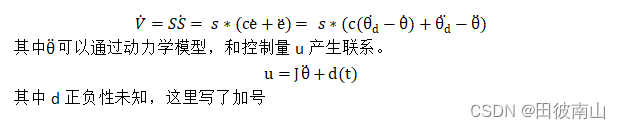
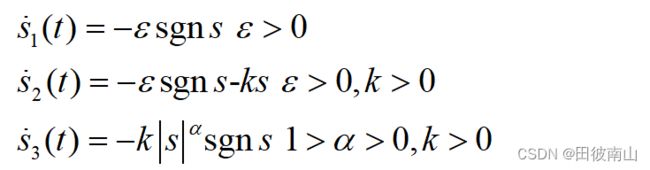
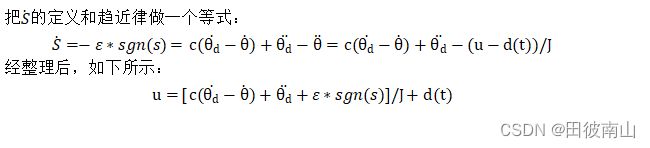
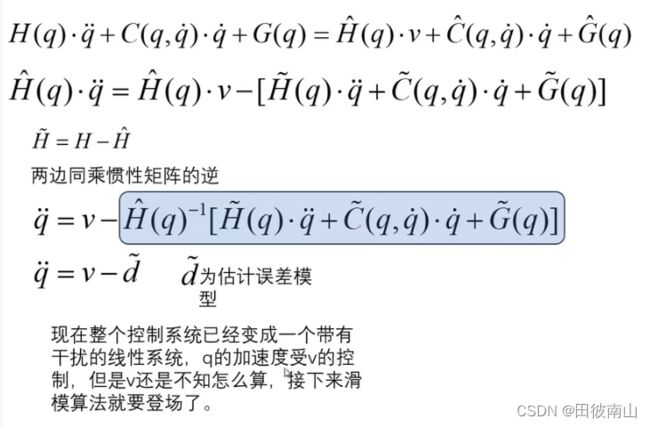
- 机器人动力学模型及其线性化阻抗控制模型
机器人动力学模型机器人动力学模型描述了机器人的运动与所受力和力矩之间的关系。这个模型考虑了机器人的质量、惯性、关节摩擦、重力等多种因素,用于预测和解释机器人在给定输入下的动态行为。动力学模型是设计机器人控制器的基础,它可以帮助我们理解机器人如何响应控制指令,并优化机器人的运动性能。具体来说,机器人动力学模型通常由一组微分方程组成,这些方程描述了机器人各关节的加速度、速度和位置与施加在关节上的力和力
- Go 语言实现本地大模型聊天机器人:从推理到 Web UI 的全流程
雷羿 LexChien
Gogolang机器人前端
接续Go-LLM-CPP专案,继续扩充前端聊天室功能一.专案目录架构:go-llm-cpp/├──bin/#第三方依赖│├──go-llama.cpp/#封裝GGUF模型推理(CGo)│└──llm-go/#prompt构建+回合管理(Go)│├──cmd/#可执行应用│└──main.go#CLI/HTTPserver入口点│├──config/│└──persona.yaml#人格模板(系统p
- java封装继承多态等
麦田的设计者
javaeclipsejvmcencapsulatopn
最近一段时间看了很多的视频却忘记总结了,现在只能想到什么写什么了,希望能起到一个回忆巩固的作用。
1、final关键字
译为:最终的
&
- F5与集群的区别
bijian1013
weblogic集群F5
http请求配置不是通过集群,而是F5;集群是weblogic容器的,如果是ejb接口是通过集群。
F5同集群的差别,主要还是会话复制的问题,F5一把是分发http请求用的,因为http都是无状态的服务,无需关注会话问题,类似
- LeetCode[Math] - #7 Reverse Integer
Cwind
java题解MathLeetCodeAlgorithm
原题链接:#7 Reverse Integer
要求:
按位反转输入的数字
例1: 输入 x = 123, 返回 321
例2: 输入 x = -123, 返回 -321
难度:简单
分析:
对于一般情况,首先保存输入数字的符号,然后每次取输入的末位(x%10)作为输出的高位(result = result*10 + x%10)即可。但
- BufferedOutputStream
周凡杨
首先说一下这个大批量,是指有上千万的数据量。
例子:
有一张短信历史表,其数据有上千万条数据,要进行数据备份到文本文件,就是执行如下SQL然后将结果集写入到文件中!
select t.msisd
- linux下模拟按键输入和鼠标
被触发
linux
查看/dev/input/eventX是什么类型的事件, cat /proc/bus/input/devices
设备有着自己特殊的按键键码,我需要将一些标准的按键,比如0-9,X-Z等模拟成标准按键,比如KEY_0,KEY-Z等,所以需要用到按键 模拟,具体方法就是操作/dev/input/event1文件,向它写入个input_event结构体就可以模拟按键的输入了。
linux/in
- ContentProvider初体验
肆无忌惮_
ContentProvider
ContentProvider在安卓开发中非常重要。与Activity,Service,BroadcastReceiver并称安卓组件四大天王。
在android中的作用是用来对外共享数据。因为安卓程序的数据库文件存放在data/data/packagename里面,这里面的文件默认都是私有的,别的程序无法访问。
如果QQ游戏想访问手机QQ的帐号信息一键登录,那么就需要使用内容提供者COnte
- 关于Spring MVC项目(maven)中通过fileupload上传文件
843977358
mybatisspring mvc修改头像上传文件upload
Spring MVC 中通过fileupload上传文件,其中项目使用maven管理。
1.上传文件首先需要的是导入相关支持jar包:commons-fileupload.jar,commons-io.jar
因为我是用的maven管理项目,所以要在pom文件中配置(每个人的jar包位置根据实际情况定)
<!-- 文件上传 start by zhangyd-c --&g
- 使用svnkit api,纯java操作svn,实现svn提交,更新等操作
aigo
svnkit
原文:http://blog.csdn.net/hardwin/article/details/7963318
import java.io.File;
import org.apache.log4j.Logger;
import org.tmatesoft.svn.core.SVNCommitInfo;
import org.tmateso
- 对比浏览器,casperjs,httpclient的Header信息
alleni123
爬虫crawlerheader
@Override
protected void doGet(HttpServletRequest req, HttpServletResponse res) throws ServletException, IOException
{
String type=req.getParameter("type");
Enumeration es=re
- java.io操作 DataInputStream和DataOutputStream基本数据流
百合不是茶
java流
1,java中如果不保存整个对象,只保存类中的属性,那么我们可以使用本篇文章中的方法,如果要保存整个对象 先将类实例化 后面的文章将详细写到
2,DataInputStream 是java.io包中一个数据输入流允许应用程序以与机器无关方式从底层输入流中读取基本 Java 数据类型。应用程序可以使用数据输出流写入稍后由数据输入流读取的数据。
- 车辆保险理赔案例
bijian1013
车险
理赔案例:
一货运车,运输公司为车辆购买了机动车商业险和交强险,也买了安全生产责任险,运输一车烟花爆竹,在行驶途中发生爆炸,出现车毁、货损、司机亡、炸死一路人、炸毁一间民宅等惨剧,针对这几种情况,该如何赔付。
赔付建议和方案:
客户所买交强险在这里不起作用,因为交强险的赔付前提是:“机动车发生道路交通意外事故”;
如果是交通意外事故引发的爆炸,则优先适用交强险条款进行赔付,不足的部分由商业
- 学习Spring必学的Java基础知识(5)—注解
bijian1013
javaspring
文章来源:http://www.iteye.com/topic/1123823,整理在我的博客有两个目的:一个是原文确实很不错,通俗易懂,督促自已将博主的这一系列关于Spring文章都学完;另一个原因是为免原文被博主删除,在此记录,方便以后查找阅读。
有必要对
- 【Struts2一】Struts2 Hello World
bit1129
Hello world
Struts2 Hello World应用的基本步骤
创建Struts2的Hello World应用,包括如下几步:
1.配置web.xml
2.创建Action
3.创建struts.xml,配置Action
4.启动web server,通过浏览器访问
配置web.xml
<?xml version="1.0" encoding="
- 【Avro二】Avro RPC框架
bit1129
rpc
1. Avro RPC简介 1.1. RPC
RPC逻辑上分为二层,一是传输层,负责网络通信;二是协议层,将数据按照一定协议格式打包和解包
从序列化方式来看,Apache Thrift 和Google的Protocol Buffers和Avro应该是属于同一个级别的框架,都能跨语言,性能优秀,数据精简,但是Avro的动态模式(不用生成代码,而且性能很好)这个特点让人非常喜欢,比较适合R
- lua set get cookie
ronin47
lua cookie
lua:
local access_token = ngx.var.cookie_SGAccessToken
if access_token then
ngx.header["Set-Cookie"] = "SGAccessToken="..access_token.."; path=/;Max-Age=3000"
end
- java-打印不大于N的质数
bylijinnan
java
public class PrimeNumber {
/**
* 寻找不大于N的质数
*/
public static void main(String[] args) {
int n=100;
PrimeNumber pn=new PrimeNumber();
pn.printPrimeNumber(n);
System.out.print
- Spring源码学习-PropertyPlaceholderHelper
bylijinnan
javaspring
今天在看Spring 3.0.0.RELEASE的源码,发现PropertyPlaceholderHelper的一个bug
当时觉得奇怪,上网一搜,果然是个bug,不过早就有人发现了,且已经修复:
详见:
http://forum.spring.io/forum/spring-projects/container/88107-propertyplaceholderhelper-bug
- [逻辑与拓扑]布尔逻辑与拓扑结构的结合会产生什么?
comsci
拓扑
如果我们已经在一个工作流的节点中嵌入了可以进行逻辑推理的代码,那么成百上千个这样的节点如果组成一个拓扑网络,而这个网络是可以自动遍历的,非线性的拓扑计算模型和节点内部的布尔逻辑处理的结合,会产生什么样的结果呢?
是否可以形成一种新的模糊语言识别和处理模型呢? 大家有兴趣可以试试,用软件搞这些有个好处,就是花钱比较少,就算不成
- ITEYE 都换百度推广了
cuisuqiang
GoogleAdSense百度推广广告外快
以前ITEYE的广告都是谷歌的Google AdSense,现在都换成百度推广了。
为什么个人博客设置里面还是Google AdSense呢?
都知道Google AdSense不好申请,这在ITEYE上也不是讨论了一两天了,强烈建议ITEYE换掉Google AdSense。至少,用一个好申请的吧。
什么时候能从ITEYE上来点外快,哪怕少点
- 新浪微博技术架构分析
dalan_123
新浪微博架构
新浪微博在短短一年时间内从零发展到五千万用户,我们的基层架构也发展了几个版本。第一版就是是非常快的,我们可以非常快的实现我们的模块。我们看一下技术特点,微博这个产品从架构上来分析,它需要解决的是发表和订阅的问题。我们第一版采用的是推的消息模式,假如说我们一个明星用户他有10万个粉丝,那就是说用户发表一条微博的时候,我们把这个微博消息攒成10万份,这样就是很简单了,第一版的架构实际上就是这两行字。第
- 玩转ARP攻击
dcj3sjt126com
r
我写这片文章只是想让你明白深刻理解某一协议的好处。高手免看。如果有人利用这片文章所做的一切事情,盖不负责。 网上关于ARP的资料已经很多了,就不用我都说了。 用某一位高手的话来说,“我们能做的事情很多,唯一受限制的是我们的创造力和想象力”。 ARP也是如此。 以下讨论的机子有 一个要攻击的机子:10.5.4.178 硬件地址:52:54:4C:98
- PHP编码规范
dcj3sjt126com
编码规范
一、文件格式
1. 对于只含有 php 代码的文件,我们将在文件结尾处忽略掉 "?>" 。这是为了防止多余的空格或者其它字符影响到代码。例如:<?php$foo = 'foo';2. 缩进应该能够反映出代码的逻辑结果,尽量使用四个空格,禁止使用制表符TAB,因为这样能够保证有跨客户端编程器软件的灵活性。例
- linux 脱机管理(nohup)
eksliang
linux nohupnohup
脱机管理 nohup
转载请出自出处:http://eksliang.iteye.com/blog/2166699
nohup可以让你在脱机或者注销系统后,还能够让工作继续进行。他的语法如下
nohup [命令与参数] --在终端机前台工作
nohup [命令与参数] & --在终端机后台工作
但是这个命令需要注意的是,nohup并不支持bash的内置命令,所
- BusinessObjects Enterprise Java SDK
greemranqq
javaBOSAPCrystal Reports
最近项目用到oracle_ADF 从SAP/BO 上调用 水晶报表,资料比较少,我做一个简单的分享,给和我一样的新手 提供更多的便利。
首先,我是尝试用JAVA JSP 去访问的。
官方API:http://devlibrary.businessobjects.com/BusinessObjectsxi/en/en/BOE_SDK/boesdk_ja
- 系统负载剧变下的管控策略
iamzhongyong
高并发
假如目前的系统有100台机器,能够支撑每天1亿的点击量(这个就简单比喻一下),然后系统流量剧变了要,我如何应对,系统有那些策略可以处理,这里总结了一下之前的一些做法。
1、水平扩展
这个最容易理解,加机器,这样的话对于系统刚刚开始的伸缩性设计要求比较高,能够非常灵活的添加机器,来应对流量的变化。
2、系统分组
假如系统服务的业务不同,有优先级高的,有优先级低的,那就让不同的业务调用提前分组
- BitTorrent DHT 协议中文翻译
justjavac
bit
前言
做了一个磁力链接和BT种子的搜索引擎 {Magnet & Torrent},因此把 DHT 协议重新看了一遍。
BEP: 5Title: DHT ProtocolVersion: 3dec52cb3ae103ce22358e3894b31cad47a6f22bLast-Modified: Tue Apr 2 16:51:45 2013 -070
- Ubuntu下Java环境的搭建
macroli
java工作ubuntu
配置命令:
$sudo apt-get install ubuntu-restricted-extras
再运行如下命令:
$sudo apt-get install sun-java6-jdk
待安装完毕后选择默认Java.
$sudo update- alternatives --config java
安装过程提示选择,输入“2”即可,然后按回车键确定。
- js字符串转日期(兼容IE所有版本)
qiaolevip
TODateStringIE
/**
* 字符串转时间(yyyy-MM-dd HH:mm:ss)
* result (分钟)
*/
stringToDate : function(fDate){
var fullDate = fDate.split(" ")[0].split("-");
var fullTime = fDate.split("
- 【数据挖掘学习】关联规则算法Apriori的学习与SQL简单实现购物篮分析
superlxw1234
sql数据挖掘关联规则
关联规则挖掘用于寻找给定数据集中项之间的有趣的关联或相关关系。
关联规则揭示了数据项间的未知的依赖关系,根据所挖掘的关联关系,可以从一个数据对象的信息来推断另一个数据对象的信息。
例如购物篮分析。牛奶 ⇒ 面包 [支持度:3%,置信度:40%] 支持度3%:意味3%顾客同时购买牛奶和面包。 置信度40%:意味购买牛奶的顾客40%也购买面包。 规则的支持度和置信度是两个规则兴
- Spring 5.0 的系统需求,期待你的反馈
wiselyman
spring
Spring 5.0将在2016年发布。Spring5.0将支持JDK 9。
Spring 5.0的特性计划还在工作中,请保持关注,所以作者希望从使用者得到关于Spring 5.0系统需求方面的反馈。