【路径规划】基于蜣螂优化算法的三维无人机航迹规划 无人机路径规划【Matlab代码#8】
文章目录
-
- 【可更换其他算法,`获取资源`请见文章第5节:资源获取】
- 1. 蜣螂优化算法DBO的数学模型介绍
-
-
- 1.1 滚球行为
- 1.2 跳舞行为
- 1.3 繁殖行为
- 1.4 偷窃行为
-
- 2. 无人机航迹规划问题介绍
- 3. 部分代码展示
- 4. 结果图展示
- 5. 资源获取
【可更换其他算法,获取资源请见文章第5节:资源获取】
1. 蜣螂优化算法DBO的数学模型介绍
1.1 滚球行为
蜣螂在整个搜索空间沿着光源的方向移动,在滚动过程中,按照如下的对滚球屎壳郎的位置进行更新:

其中,t代表当前迭代数,xi表示第i个蜣螂的位置信息;k代表一个常数,表示为偏转系数;α∈(0,1)是一个随机数;a 是一个自然系数,为-1或1;Xw是全局最差位置。
1.2 跳舞行为
当蜣螂遇到障碍物时,它会通过跳舞来重新定向,主要思想是通过正切函数来进行:

tan(θ) 为偏转系角。
1.3 繁殖行为
作者采用一种边界选择策略模型雌性蜣螂产卵的地方,定义如下:
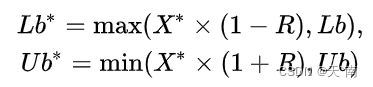
X*为当前最佳位置;Lb表示下界,Ub表示上界。
在迭代过程中,卵球的位置是动态变化的,定义如下:
![]()
Bi表示为卵球的位置,b1和b2为1×D 的随机向量。
此外,一些成年蜣螂会从地下钻出来寻找食物,下面公式模拟了蜣螂的觅食过程:
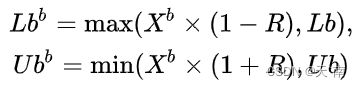
Xb为全局最佳位置,Lbb和Ubb分别表示最佳觅食区域的上下界。
故成年蜣螂的位置更新公式为:
![]()
C1是服从正态分布的随机数;C2∈(0,1)是一个随机向量。
1.4 偷窃行为
部分蜣螂会从其他蜣螂那里偷粪球,假定Xb是争夺食物的最佳地点,因此具有偷盗行为的蜣螂位置更新描述如下:
![]()
g是服从均值为0,方差为1的正态分布的随机向量;S为一个常数。
2. 无人机航迹规划问题介绍
路径规划能力是无人机械完成各项规定任务的基本能力,而对于无人机而言,其三维航迹规划得合理与否,直接决定了无人机能否完成规定的任务,而航迹规划算法,又直接影响着航迹规划的质量。因此,进行无人机三维航迹规划算法的研究,对于提高无人机的任务完成率具有重要的意义。
近年来,针对无人机航迹规划问题的研究主要分为两类,一类是基于数学计算的航迹规划方法,另一类是基于智能仿生算法的航迹规划方法。其中,智能仿生算法在求解复杂、多约束条件下的无人机航迹规划问题时,具有较快的运算速度和较强的适用性,故受到了很对学者的青睐。
3. 部分代码展示
%% 设置起始点
startPoint = [0,0,20];
endPoint = [200,200,40];
plot3(startPoint(1),startPoint(2),startPoint(3),'ro');
text(startPoint(1),startPoint(2),startPoint(3),'起点','Color','k','FontSize',15)
plot3(endPoint(1),endPoint(2),endPoint(3),'r*');
text(endPoint(1),endPoint(2),endPoint(3),'终点','Color','k','FontSize',15)
title('地图信息')
%% 蜣螂算法参数设置
NodesNumber = 2;%起点与终点之间节点的个数
dim = 2*NodesNumber; %维度,一组坐标点为[x,y,z]3个值,,其中X等间隔分布,所以总的数据个数为2*NodesNumber
lb = [20.*ones(1,NodesNumber),0.*ones(1,NodesNumber)];%x,y,z的下限[20,20,0]
ub = [180.*ones(1,NodesNumber),50.*ones(1,NodesNumber)];%x,y,z的上限[200,200,50]
fobj = @(x)fun(x,NodesNumber,startPoint,endPoint,ThreatAreaPostion,ThreatAreaRadius);%适应度函数
SearchAgents_no=70; % 种群数量
Max_iteration=50; % 设定最大迭代次数
%DBO寻优
[Best_pos_DBO,Best_score_DBO,DBO_curve]=DBO(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);
%根据寻优获得的节点,获取插值后的路径
[X_seq_DBO,Y_seq_DBO,Z_seq_DBO,x_seq_DBO,y_seq_DBO,z_seq_DBO] = GetThePathLine(Best_pos_DBO,NodesNumber,startPoint,endPoint);
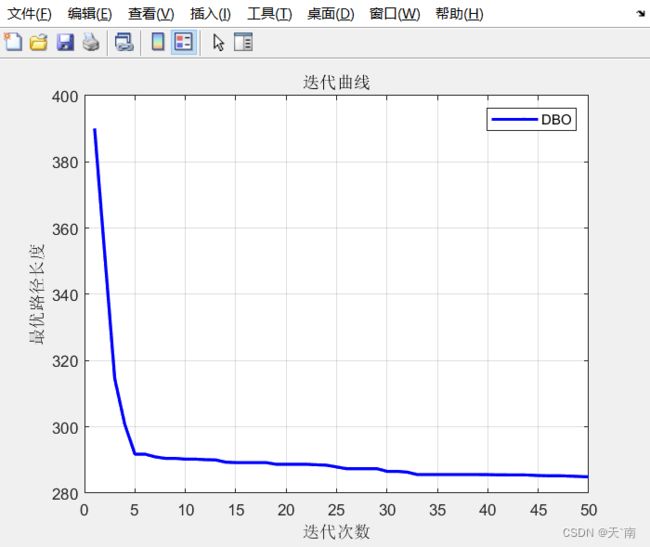
4. 结果图展示

5. 资源获取
可以获取完整代码资源。