驱动基石之异步通知
异步通知的流程
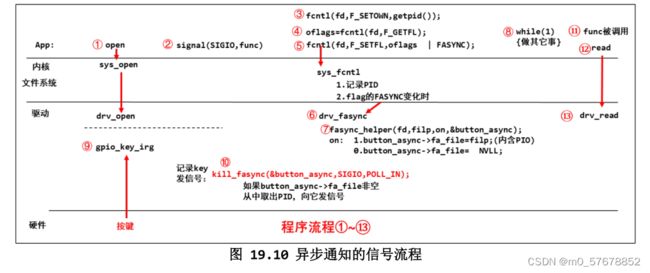
重点从②开始:
② APP 给 SIGIO 这个信号注册信号处理函数 func,以后 APP 收到 SIGIO
信号时,这个函数会被自动调用;
③ 把 APP 的 PID(进程 ID)告诉驱动程序,这个调用不涉及驱动程序,在内
核的文件系统层次记录 PID;
④ 读取驱动程序文件 Flag;
⑤ 设置 Flag 里面的 FASYNC 位为 1:当 FASYNC 位发生变化时,会导致驱
动程序的 fasync 被调用;
⑥⑦ 调 用 faync_helper , 它 会 根 据 FAYSNC 的 值 决 定 是 否 设 置
button_async->fa_file=驱动文件 filp:
驱动文件 filp 结构体里面含有之前设置的 PID。
⑧ APP 可以做其他事;
⑨⑩ 按下按键,发生中断,驱动程序的中断服务程序被调用,里面调用
kill_fasync 发信号;
⑪⑫⑬ APP 收到信号后,它的信号处理函数被自动调用,可以在里面调用
read 函数读取按键。
上述是韦东山老师的笔记,大概简描下流程就是:
APP程序(进程)给要接受的信号注册一个信号处理函数,APP程序也要将自己的进程号告诉驱动程序,通过设置FASYNC 位来使启动程序的fasync 函数被调用。fasync 函数里调用fasync_helper 函数来设置指针 button_fasync(自己定义的struct fasync_struct类型的指针),fasync_helper 函数的简要 作用:
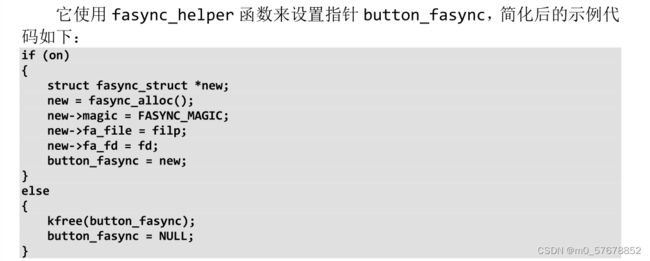
**注意:**一定要设置FASYNC 位有效(想当于异步通知的开关)。
然后在按键中断处理函数里调用kill_fasync 函数去发送信号。app程序正在运行,如果有按键按下则按键中断处理函数会发送信号给app,然后app跳转信号处理函数执行。
代码
驱动程序代码
#include 应用程序代码
#include \n" , argv[0]);
return -1;
}
signal(SIGIO, sig_func);
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
fcntl(fd, F_SETOWN, getpid());
flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | FASYNC);
while (1)
{
printf("www.100ask.net \n");
sleep(2);
}
close(fd);
return 0;
}