3DMAX汽车绑定动画模拟插件MadCar疯狂汽车使用教程

3DMAX汽车绑定动画模拟插件MadCar疯狂的汽车,用于通过模拟控制来快速装配轮式车辆及其动画。这个新版本允许装配任何数量的车轮的车辆,以及包括摩托车在内的任何相互布置。还支持任意数量的拖车。
每个车轮和悬架都有简化的行为设置以及微调,这可以模拟赛车和重型卡车的运动。动画是在模拟过程中实时创建的。模拟可以通过键盘、操纵杆、游戏控制器或方向盘进行控制。还支持“跟随对象”模式。
该软件包还包括一个程序贴图,可在车辆行驶的表面上生成轮胎痕迹(仅限V-Ray)。
主要功能:
*任意数量的车轮,以及它们的任何相互布置
*包括摩托车索具
*新助手“力量”可以模拟任何外力
*新的助手“碰撞球体”有助于模拟地面和车辆任何部分之间的碰撞
*芒果管道支持
系统要求:
3ds Max2014 - 2024
3ds Max Design:全部
操作系统:Windows XP、Windows Vista、Windows 7、8、10、11 32位和64位均可。
轮胎标记需要V-Ray渲染引擎。
开始使用:
安装后,可以从3dMax命令面板创建 MadCar:
创建 > 帮助 > MadCar
插件包括以下对象类型:

§底盘用于汽车框架。
§悬架用于减震器。
§轮子是汽车的轮子。
§MadCar正在管理皮肤。
§起始位置设置汽车的初始位置。
§用于连接车辆的拖车挂钩和拖车舌对象。
不要缩放和镜像这些对象。仅旋转和移动是可接受的。
所有对象都可以与几何图形链接
底盘可以与车架的几何形状连接。
悬架可以与制动块和悬架安装部件的几何形状相连接。
车轮可以与车轮几何形状关联。
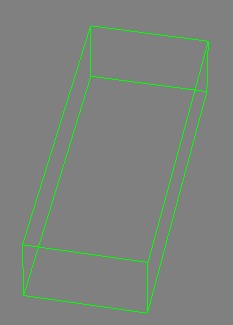
底盘
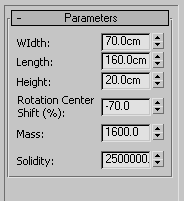
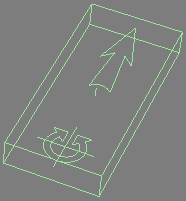
底盘决定了汽车的整体尺寸、质量以及车轮与表面突然碰撞时的坚固性。
§宽度等于汽车宽度的一半。
§长度等于汽车长度的一半。
§高度等于汽车高度的一半。
§质量是汽车的质量,以千克为单位。坚固性是汽车的结构刚度。
§坚固性是汽车的结构刚度
质量值决定了汽车的反应性/惰性。重量越重,悬架下垂得越厉害,汽车加速和停止的速度就越慢。
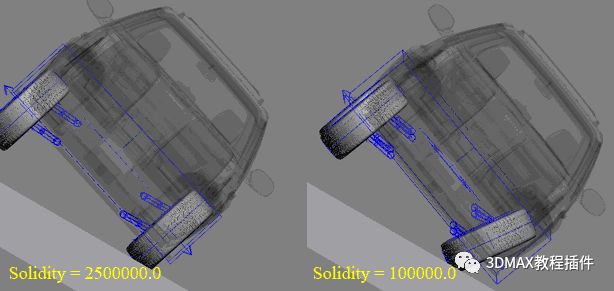
坚固性决定了变形抗力。当车轮与地面突然碰撞时,轮轴可能会弯曲并偏离初始位置。高硬度时发散较小。
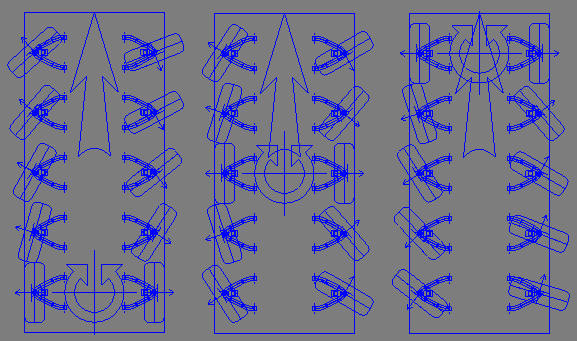
旋转轴的位置影响方向盘的行为。以下是 -75%、0%、75% 值的示例。
悬架

悬架部分控制汽车悬架设置,例如交叉悬架连杆的长度、弹簧刚度、油阻尼、缓冲气体张力、悬架限制、发动机驱动、转向和其他设置。
长度是交叉悬架连杆的长度。
顶部止动件和底部止动件是顶部和底部悬挂块止动件
轮驱动是发动机驱动。
转向装置是转向连杆机构。当方向盘转动时,车轮也会转动。
手刹通过手刹将车轮锁定。
阻尼器设置
Plug-in 展示了气油阻尼器的模型。
阻尼器移位是阻尼器顶部支架的移位

预设有助于快速设置,无需深入了解阻尼器功能 - 您有机会选择阻尼器参数预设。
刚性系数可让您校正所得的阻尼器电阻值,而无需一一固定多个参数。在大多数情况下,使用这些设置足以进行调节。
附加阻尼器设置用于阻尼器参数的详细设置。这些设置适用于能够微调阻尼器参数的高级用户。

磨合测试模式下,系统实时生成道路不平整情况,并显示阻尼器对此的响应。
§阻尼器设置是阻尼器参数。
§弹簧刚度是弹簧的刚度。
§油阻尼就是耐油性。
§缓冲器刚度是缓冲器刚度。
§磨合台设置是测试台的参数。
§每个阻尼器的质量:它是落在阻尼器上的质量。例如,如果四轮汽车的质量为 1000 公斤,则每个阻尼器上将承受 250 公斤的重量。
§重力:它是自由落体的加速度/重力因子。它以厘米 - 980cm/s2、米 - 9.8m/s2 或英寸 - 386“/s2 表示。
§道路小丘率是指道路上小丘分布的频率。
§道路孔洞率是指道路上孔洞分布的频率。
车轮
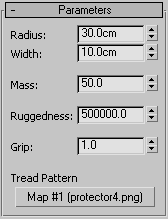
车轮部分设置车轮的尺寸和属性。
§半径是轮子的半径。
§宽度是车轮的宽度。
§质量是车轮的质量,以千克为单位。
§坚固性是指车轮的刚度。粗糙度越小,车轮表面的弹性变形越深。
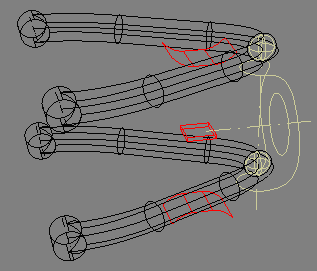
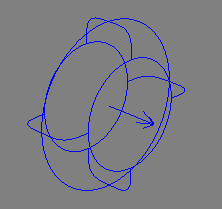
§抓地力是表面摩擦力的常数。摩擦常数越大,汽车打滑越少,但急转弯时翻车的可能性也越高。安装车轮时,确保车轮箭头指向车外方向,而不是车内方向。
胎面花纹——轮胎痕迹。用于生成轮胎痕迹的纹理。胎面方向的示例。

设置车轮时,车轮箭头必须指向车外而不是车内。
MadCar
这个对象代表将所有汽车部件组合成一个整体的皮肤。
汽车安装是将汽车组装成一个单元。
虚拟尺寸设置皮肤的尺寸。
皮肤内部发生的所有组件都会自动应用。
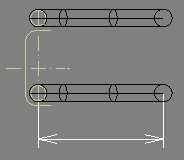
对于汽车的组装,蒙皮内 应有一个 底盘对象以及相同数量的车轮和 悬架对象。
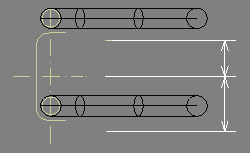
每对悬架和车轮应具有相同的位置,如下所示:
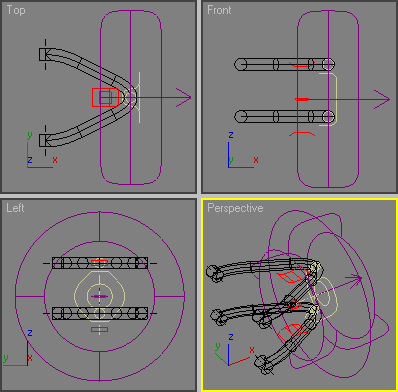
根据所需配置放置所有汽车部件。如下,例如:

然后按更新(锁定组件)
如果组装成功,组件应被锁定(无法移动它们)并呈蓝色,如下所示。此后对组件的任何更改都不会影响整个装置。要更新参数,您需要再次 按更新(锁定组件) 。

如果您想解锁组件并更改其位置,请按重置(解锁组件)。
参数
参数为通用参数。
重力是自由落体的加速度/重力因子。它以厘米 - 980cm/s2、米 - 9.8m/s2 或英寸 - 386”/s2 表示。
表面是汽车将在其上移动的表面对象。选择和更改对象以及加载场景后, 必须按“更新表面”。它与车轮与地面相互作用的算法相联系,该算法使用射线追踪加速器 ,合理地加快了计数过程,并使计数时间几乎与表面内的多边形数量无关。
起始位置定义了将作为汽车起始位置的对象位置。如果选择了该对象,则按更新(锁定组件)后,汽车将自动替换到起始位置。
动画
动画包括计数和动画设置:
步骤/帧固定帧的关键点数量。此设置值较高会提高计数精度,但会降低计数速度;它还导致HDD上场景大小的增加。该设置值过低可能会导致高速行驶时车轮运行不均匀。
样本固定每个步骤的计数/估算样本数。该设置值较高会提高计数精度,但会降低计数速度。
上述设置值过低可能会导致车轮振动,车辆在制动状态下在斜坡上滑行。
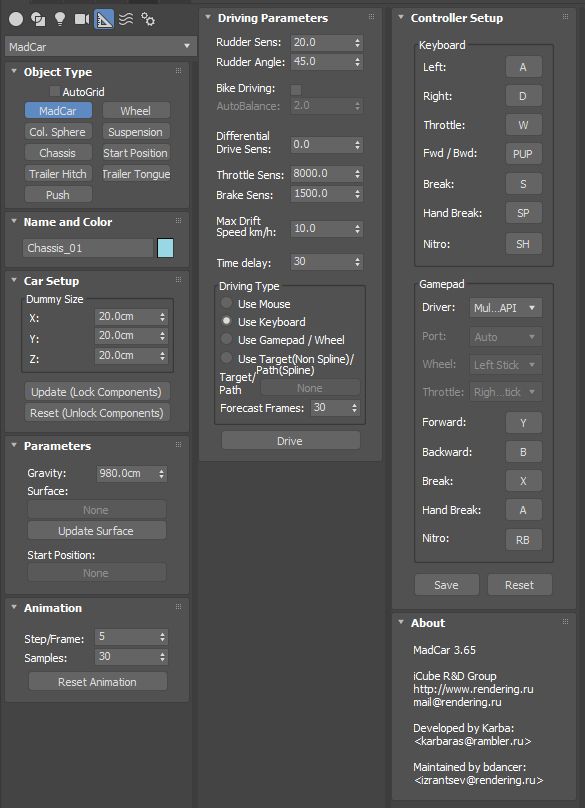
驱动参数
驾驶参数是汽车驾驶设置。
舵灵敏度是方向盘的响应。值越低,舵的反应就越小。将此设置固定为较低值以使车轮平滑/缓慢转动,较高值将导致车轮快速转动。
舵角是终极转向锁。
自行车驾驶打开摩托车控制系统
AutoBalance帮助摩托车保持平衡并防止摔倒
摩托车装备视频教程:
差速驱动灵敏度- 转弯时车轮的多向运动。例如,右转时,右轮将向后旋转,向左向前旋转。
油门灵敏度是加速踏板的响应。该值越高,给予驱动轮的冲力就越大。
制动灵敏度是制动踏板的反应。高值使制动更加主动/强烈。
最大漂移速度- 车轮的最大滑动速度高于此速度,自动释放油门和制动器。这个参数越小,机器的行为就越可预测,但极端驾驶的可能性就越小。低值(1-3公里/小时)建议初学者使用。
Time Delay是帧之间的时间延迟,以毫秒为单位设置。为了区分鼠标和键盘反应所需的CPU时间,需要时间延迟。如果该值太小,驱动控制可能会反应迟缓,甚至被阻塞。在这种情况下,应延长延迟时间。
驾驶类型是驾驶控制的类型。可能有以下变体:
鼠标是用鼠标进行驾驶控制。鼠标向左或向右移动使轮子分别转动。鼠标的上下移动对应于加速和减速。车轮向前运转即进入前进档。车轮向后转动进入倒档。鼠标右键负责手刹。
键盘是通过键盘进行驱动控制。“A”键用于向左转。“D”键是向右转。“W”键是加速器。“S”键是刹车键。空格键用于手刹。 PAGE UP进入前进档。 PAGE DOWN进入倒档。
操纵杆 驾驶控制装置为: 4为前进档。 2是倒档。 3是手刹。

方向盘 驾驶控制:变速箱手柄负责换档(前进档/倒档),标记按钮为手刹。

目标是目标对象/要遵循的对象。预测帧表示汽车预测物体运动以进行轨迹计算的帧数。
驾驶
它激活汽车驾驶窗。

要开始/停止驾驶,请按ENTER。
拖车
为了连接两辆车,将拖车挂钩添加到轨道上将连接拖车的位置。

将拖车舌 添加 到拖车上将连接卡车的位置。

用 拖车舌连接拖车挂钩,如下所示
车辆现已加入。

从现在开始,如果您移动卡车,拖车就会跟随它
轮胎痕迹(需要 V-Ray)
MadCarTrackTexture。用于制作轮胎标记。
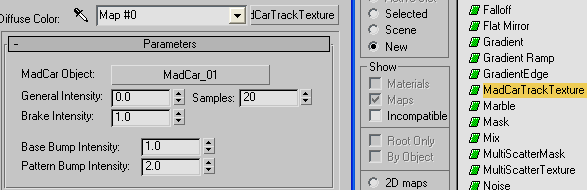
MadCar 对象- 纹理生成轨迹的 MadCar 对象。
§一般强度- 车辆正常运动时痕迹的强度。
§制动强度- 车轮打滑时痕迹的强度。
§样品- 标记的质量。高值会减慢渲染速度。
§基础凹凸强度- 凹凸的总强度。
§花纹凹凸强度- 轮胎花纹的凹凸值。
MadcarTrackTexture 需要在 MadCar 行驶的对象的材质中使用。
它可以在任何插槽中使用(漫反射、凹凸、镜面反射等)。在纹理设置中,您需要指定它属于哪个 MadCar 对象。如果您需要多个 MadCar 的标记,则需要混合多个 MadcarTrackTexture
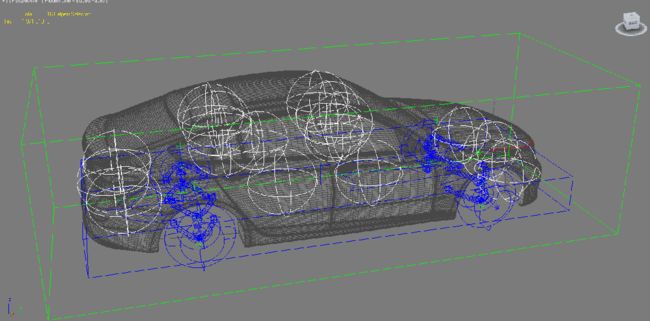
碰撞球
MadCar 中的碰撞。
MadCar 模拟中需要计算 2 种类型的碰撞 1. 车轮与地面之间的碰撞 2. “碰撞球”与地面之间的碰撞。
默认情况下,汽车的车身不会模拟翻车时可能与障碍物或地面发生的碰撞。如果你需要模拟这样的事件,你需要在MadCar rig中添加“Collision Spheres”。放置它们,使它们的组合体积重复您的车辆的形状。
尽量保持数量或球体尽可能少(最佳数量为 10-20),否则可能会减慢模拟过程。“Rigidness”参数控制碰撞的刚度,“Grip”参数控制摩擦力。您将要影响您的汽车的障碍物应包含在表面的几何形状中。
碰撞球使用示例:


烘焙到关键帧
我们最近发布了一个 烘焙脚本(VGMakeKey.ms)
将其放入场景后,您需要通过“自定义用户界面”添加到界面
烘烤时需要选择实际物体
常见问题:
MadCar 算法基于现实世界的物理原理,这需要真实世界的车辆尺寸和其他设置才能正确工作。
控制您的车辆
为了获得完美的车辆控制效果,请确保所有物理原理正确,并逐步进行模拟
开始驾驶,直到开始出错为止,停止,倒回到正常的点,然后从该点继续,这适用于您使用的任何控件
跟随目标或样条线
MadCar 基于现实生活物理特性的模拟 - 这并不总是可预测的。车辆的能力受到其物理参数、转弯半径、摩擦力、制动力、发动机功率等的限制。但目标的运动不受限制,因此车辆不能总是跟随目标,因为它有真实的目标人生体力有限,所以只能尽力而为。
许可证错误
如果出现许可证故障和错误,可能由磁盘重新格式化、重新安装操作系统或更换组件引起。
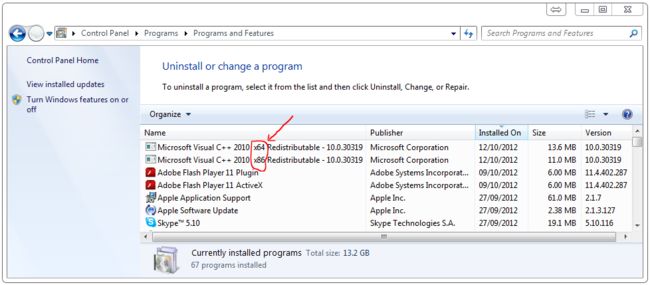
DLL 错误
§加载 Dll 时出错
§Dll 初始化失败
§错误代码 126 - 找不到指定的模块
§MadCar.dlo 初始化失败
请确保您安装了 Microsoft Visual C++ 2010 Redistributable Package 32 位或 64 位。
加载文件时出错
§MadCar.dlo 在 Windows Server 2012 上初始化失败
请注意,服务器操作系统通常不受支持,因为它可能会幸运某些组件,但 Windows Server 2012 有一个解决方法,检查 c:\windows\system32\XINPUT9_1_0.DLL 是否存在,这可以在 Windows 7 上找到
安装问题
确保 3dmax 未运行(也请在任务管理器中仔细检查)
确保您使用管理员权限进行安装(在 Windows 7 中,即使您以管理员身份登录,右键单击“以管理员身份运行” )
确保为您的 3dmax 版本选择正确的路径
其他错误
下载最新版本的MadCar插件。