ROS通信机制
目录
ROS中基本通信机制
一、遇到的问题及解决方法
二、理解内容总结
ROS中基本通信机制
| 话题通信 | 服务通信 | 参数服务器 | |
| 模式 | 发布订阅 | 请求响应 | 参数共享 |
| 双方 | 发布方和订阅方 | 服务端(server)和客户端(client) | 共享数据和节点 |
| 数量 | 都可以有多个 | 都可以存在多个 | |
| 节点关系 | 多对多 | 一对多(一个server) | |
| 启动顺序 | 发布方和订阅方谁先启动都可以 | 服务端先启动 客户端后请求 (即客户端发起请求时客户端已启动) |
|
| 关注点 | master在其中起一个中间媒介连接的作用 0.流程已经被封装直接调用即可;1.话题;2.发布方、服务端;3.订阅方、客户端;4.数据载体 |
||
| 怎样联系 | 共同的话题 | 客户端先发起请求,服务端回应 | 先有一个容器放数据,可以从里边拿或放,是共享的 |
| 理解示例 | APP选择关注方向,比如体育、科技(关注内容就是话题),关注之后就会自动推送你关注的内容 | 浏览器搜索,输入网址后回车就会响应一些相关信息 实验室有元器件,实验室的人都可以拿或放 | |
| 案例演示 | 控制小乌龟做你想要的运动 | 获取乌龟位姿 在指定位置生成一只新的乌龟 |
改变乌龟窗口的背景颜色 |
| 代码实现 | 发布方发布的数据可以被订阅方接受到 | 两个数字求和 | 实现参数增删改查操作 |
| 应用场景 | 适用于不断更新(不间断)的数据传输 | 适用于对时时性有要求、具有一定逻辑处理的应用场景 | 适用于存在数据共享的一些应用场景 |
| 适用于当传输一些复杂的数据,比如: 激光雷达的信息(包含雷达的扫描角度,测出的障碍物距离),需要用到其他的消息类型如float;类似于C中的结构体 步骤
|
||
| 自动生成的中间文件 |
|
|
| C++ | Python | |
| 配置文件路径 | 避免代码误抛异常,将前面生成的 head 文件路径配置进vscode目录下的 c_cpp_properties.json | 将前面生成的 Person.py 文件路径配置进vscode目录下的 settings.json |
| 与内置的消息类型的区别 |
|
|
一、遇到的问题及解决方法
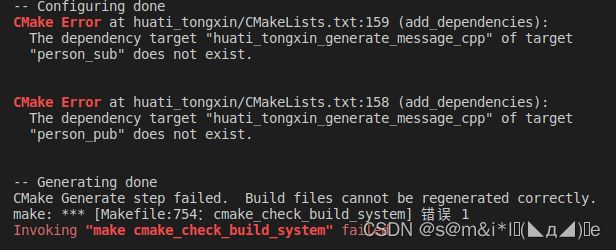
1.自定义msg配置文件CMakeLists.txt时三处顺序,顺序错误会报错
#第一处
add_executable(person_pub src/person_pub.cpp)
add_executable(person_sub src/person_sub.cpp)
#第二处
#可以保证编译关系,配置这个后意味着会先编译自定义的Person.msg文件,再编译可执行的源文件person_pub.cpp和/person_sub.cpp
add_dependencies(person_pub ${PROJECT_NAME}_generate_message_cpp )
add_dependencies(person_sub ${PROJECT_NAME}_generate_message_cpp )
#第三处
target_link_libraries(person_pub
${catkin_LIBRARIES}
)
target_link_libraries(person_sub
${catkin_LIBRARIES}
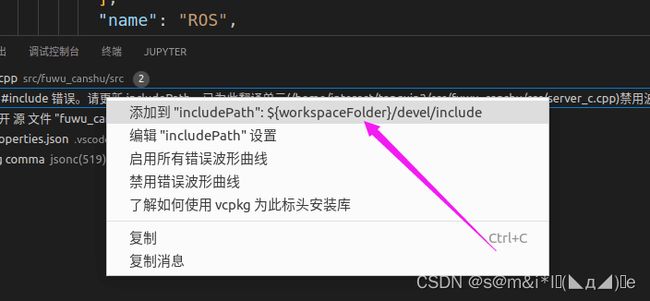
)2.问题:使用自定义msg时,配置文件弄好了但还报错
解决方法:看vscode目录下的/home/interest/again2/.vscode/c_cpp_properties.json下的路径
"includePath": [
"/opt/ros/noetic/include/**",
"/usr/include/**", //**代表包含include下所有文件
"/home/interest/again2/devel/include/**" //第一个
//"/home/interest/again2/src/huati_tongxin/include/huati_tongxin" //第二个
],
//第一个是/home/ubuntu名/工作空间/devel/include/**
//第二个是/home/ubuntu名/工作空间/src/功能包名/include/功能包名(比较全的路径)
//可以第一个和第二个试着弄,只用其中一个就能编译成功,具体哪一个要尝试可以第一个和第二个试着弄,只用其中一个就能编译成功,具体哪一个要尝试
3.问题:Python代码和编译和配置文件都没有错,但运行时报了下列错误:
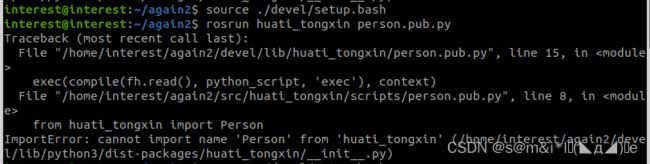
解决方法:代码导包时是否少了路径/home/interest/again2/devel/lib/python3/dist-packages/huati_tongxin/msg下的.msg
#导包
import rospy
#from huati_tongxin import Person(错)
from huati_tongxin.msg import Person(对)
4.服务通信自定义消息类型生成中间文件时报错
问题:
解决办法: 会自动在c_cpp_properties.json改路径
5.问题:刷新环境变量报错
解决方法:必须在工作空间下
interest@interest:~/tongxin2$ cd ..
interest@interest:~$ source ./devel/setup.bash
bash: ./devel/setup.bash: 没有那个文件或目录
interest@interest:~$ cd tongxin2
interest@interest:~/tongxin2$ source ./devel/setup.bash
interest@interest:~/tongxin2$
| 命令行 | 作用 |
| pwd | 打印代码路径 |
| rqt_graph | 计算图查看 |
| rosnode : 操作节点 rostopic : 操作话题 rosservice : 操作服务 rosmsg : 操作msg消息 rossrv : 操作srv消息 rosparam : 操作参数 |
动态命令,终端命令行启动后使用 区别: rosnode info /节点 rostopic info 话题 注意: 查看自定义的消息要进入相应的工作空间 |
| rostopic echo +话题名 | 获取指定话题当前发布的消息 |
| rosservice call 话题 tab补齐 | 服务通信查看数据 |
| rosparam list | 列出一系列参数 |
| rosparam get /键名 | 获取对应键名的值 |
| rosmsg list | grep -i 自定义消息名 | 查看自己定义的消息类型 |
二、理解内容总结
1.ros节点名称要保证唯一性,不然启动下一个后前一个会被盖掉
2.回调函数doMsg
特点:每订阅一条信息都会执行一它
回调函数与一般函数的最大区别:
- 一般(自己写的)调用函数,代码执行,执行到它就直接去调用这个函数了;函数什么时候被调用时可以掌控的,有需要就去调用执行了;像一颗子弹小鬼子过来了我就开枪打小鬼子
- 回调函数在从上到下执行程序的过程中不一定被执行,语法上虽然出现这个函数名了,但不是马上执行,而是等待外部的一个时机,等到外部有一个消息msgs传递过来了msgs就像一个铃铛一样提醒回调函数一下该执行了;是由外部消息控制的;像一个地雷提前埋好,小鬼子过来踩着(外部消息)了就打着小鬼子了
3.说软启动,就是延迟启动,开机后延缓一会才启动,相当于有一个缓冲区;可以加上休眠函数解决
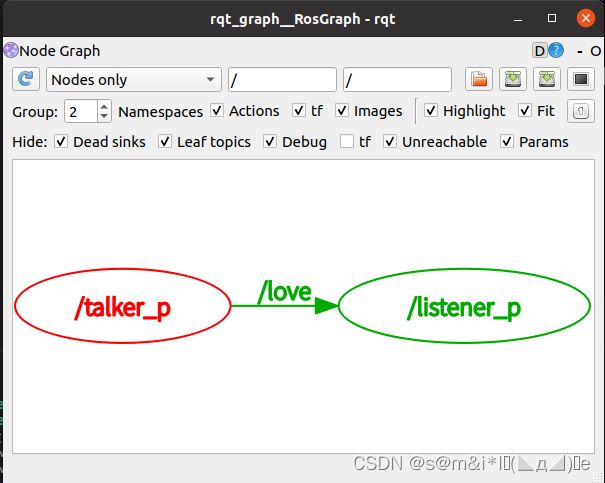
4.rqt_graph要在数据显示时(执行相关源文件后)再使用
椭圆里是节点名,箭头上方是共同的话题,箭头指向代表消息传递的顺序
5.ros当中极其重要的特点:节耦合
尽管使用不同的语言写的节点也可以实现数据交换,只要保证话题一样即可。
6.服务通信涉及到int main(int argc, char *argv[])参数问题
具体详解见http://t.csdn.cn/H3Syr
7.python中try ... except ... as...的作用 http://t.csdn.cn/TAq37
8.实操内置小乌龟运行
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
(一)需求描述:编码实现乌龟运动控制,让小乌龟做圆周运动。
rostopic list 和rqt_graph 得到乌龟运动话题是/turtle1/cmd_vel
rostopic type /turtle1/cmd_vel 获取消息类型
rostopic info /turtle1/cmd_vel 得到消息类型,发布方,订阅方
rosmsg show geometry_msgs/Twist 得到消息格式
有乌龟运动(偏航)的线(x有值)速度(linear)和角(z有值)速度(angular)
线速度主要和直线上前进后退的速度有关,角速度主要和拐弯的速度有关
| 线速度 在空间直角坐标系下 |
x | 直线走 |
| y | 垂直横着走 | |
| z | 上下方向走 |
注: 麦克纳母轮有y方向速度,无人机有y,z方向速度
| 角速度 欧拉角 再转换成 四元素 |
x | 翻滚(相当于半打滚的左晃右晃) | roll |
| y | 俯仰(抬头低头) | pitch | |
| z | 偏航(左右移动,平面的垂直方向进行左拐右拐) | yaw |
rostopic echo /turtle1/cmd_vel 打印乌龟运动(键盘控制)速度消息
命令行做圆周运动
interest@interest:~$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "
linear:
x: 1.0 //只有x方向上有速度
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 2.0" //只有z轴方向上有速度,值越大圆的半径越小还有代码实现(比较灵活)
(二)需求描述: 已知turtlesim中的乌龟显示节点,会发布当前乌龟的位姿(窗体中乌龟的坐标以及朝向),要求控制乌龟运动,并时时打印当前乌龟的位姿。
获取话题:/turtle1/pose
rostopic list
获取消息类型:turtlesim/Pose
rostopic type /turtle1/pose
获取消息格式:
rosmsg info turtlesim/Pose
响应结果:
float32 x
float32 y //x,y是位姿
float32 theta //theta是方向(朝向)
float32 linear_velocity
float32 angular_velocity
//朝向是以弧度为单位的rad,逆时针转为递增,顺时针转为递减(三)需求描述:编码实现向 turtlesim 发送请求,在乌龟显示节点的窗体指定位置生成一乌龟,这是一个服务请求操作。
获取话题:/spawn
rosservice list
获取消息类型:turtlesim/Spawn
rosservice type /spawn
获取消息格式:
rossrv info turtlesim/Spawn
响应结果:
float32 x
float32 y //x、y是位姿
float32 theta //朝向,180°=3.14;90°=3.14/2=1.57
string name
--- //将请求(上面)和响应(下面)分开了
string name(四)需求描述: 修改turtlesim乌龟显示节点窗体的背景色,已知背景色是通过参数服务器的方式以 rgb 方式设置的。
获取参数列表:
rosparam list
响应结果:
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
//查看颜色具体值
rosparam get /turtlesim/background_r
69
//改变颜色值
rosparam set /turtlesim/background_g
255R(red)G(green)B(blue)的值都是0-255
b=255,g=0,r=0 是黑色
b=0,g=255,r=0 是绿色
b=0,g=0,r=255 是红色
b=0,g=0,r=0 是白色
9.学习了入门之后ROS通信机制的进阶最好去官方了解学习