Nrf24l01无线模块
Nrf24l01无线模块
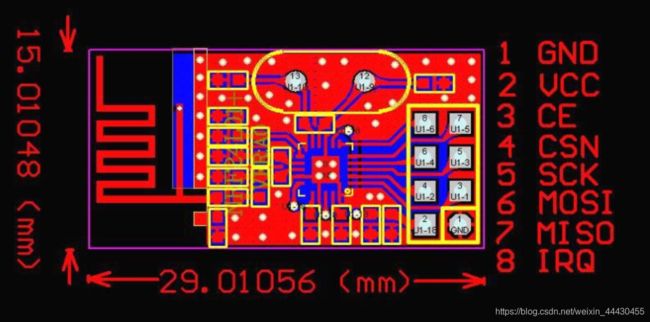
一,模块介绍
二,接口电路,
模块连接注意点:
(1) VCC 脚接电压范围为 1.9V~3.6V 之间,不能在这个区间之外,超
过 3.6V 将会烧毁模块。推荐电压 3.3V 左右。
(2) 除电源 VCC 和接地端,其余脚都可以直接和普通的 5V 单片机 IO
口
直接相连,无需电平转换。当然对 3V 左右的单片机更加适用了。
(3) 硬件上面没有 SPI 的单片机也可以控制本模块,用普通单片机 IO
口模拟 SPI 不需要单片机真正的串口介入,只需要普通的单片机 IO 口
就可以了,当然用串口也可以了。
然后我接的就是CE连的A4,CSN连的C4,SCK连的A5,MOSI连的A7,MISO连的A6,IRQ是中断脚,可以接外部中断,不过我没有接。这里注意一下哈,中断脚要想低电平触发的三种情况:1,发送端发送完了数据并接收到接收端的ACK应答;2,接收端接受到数据;3,达到最大重发次数(外部中断的时候需要考虑的)
三,工作模式
工作模式由 PWR_UP register 、PRIM_RX register 和 CE 决定,有如下表格中那么多的工作模式
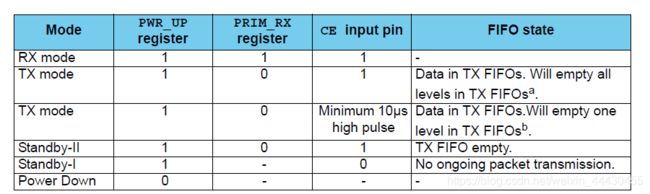
(英文版)

(中文版)
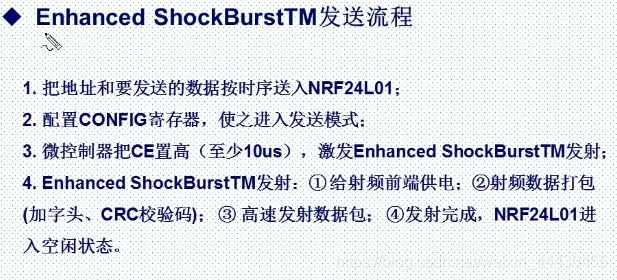
其中收发模式有 Enhanced ShockBurstTM 收发模式、ShockBurstTM 收
发模式和直接收发模式三种,收发模式由器件配置字决定,但是主要用到的是 Enhanced ShockBurstTM 收发模式,只有该模式支持自动ANK,和自动重发。
下面也都是介绍的这个接收模式。
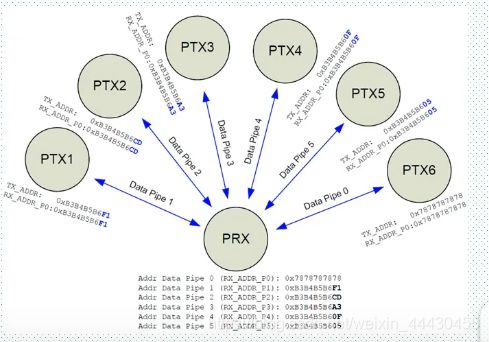
就是上面这张图,想象一下,这一个圈就是一个带有8个爪子的无线模块,RX是接收功能的(设为接收模式)模块,TX是发送功能的(设为发送模式)模块,这样就是被设为接收模式的端子有6个接受通道,而被,设为发送模式的端子有1个发送通道,它们的传输是这样子的:
发送端子的TX_add寄存器存放的是接收端子6个通道中的其中一个通道的地址,然后传送完数据之后,接收端在确认收到数据后记录发送端的地址,并以此地址(接收端某个通道的地址)为目标地址发送应答信号这个是自动的,不是程序设置的,应属于硬件实现)
发送端的2401会用自己接收通道0来接受接收端的2401发送来的相应信号。但是接收端的2401发送应答信号的时候,也发送的地址就是接收端的某个接受通道的地址。所以发送端的接收通道0的地址要设置成这个地址。注意就只能是发送通道的通道0作为应答信号
通道0有40位自身地址,通道1—5都为8位自身地址和32位公用地址。
例子:
TX5:TX_ADDR=0xB3B4B5B605
TX5:RX_ADDR_P0=0xB3B4B5B605
RX:RX_ADDR_P5=0xB3B4B5B605
介绍完模式之后就来看
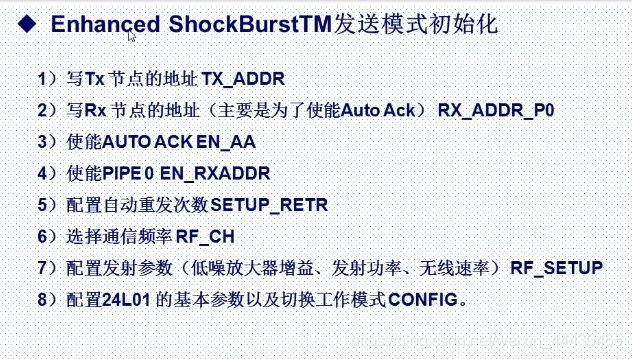
该模式的发送的流程以及初始化该发送模式
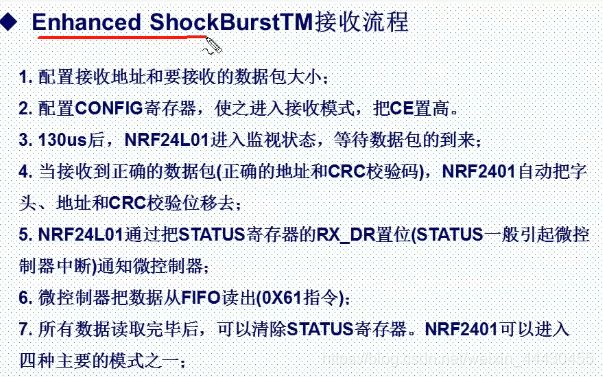
该模式的接收流程以及初始化该接收模式

知道了这个无线模块的接收和发送操作流程还有接收和发送的模式配置,然后就要关注它的通信方式spi了:发送spi读写指令,并对寄存器读写,(读出寄存器里面的值或者像寄存器里面写入数据)主要学习的是库函数的版本,与之有关的寄存器也要了解一下哈~
四,相关寄存器介绍
这里是重点,找机会补上。
五, spi通信有关的库函数调用
stm32是有硬件spi的,这里连的是a5,6,7三个脚,(虽然一般上认为spi通信是4个脚,但是有一个是片选脚,在spi封装的库函数模块里面,没有加进去)
然后原子例程里是由现成的spi封装好的函数模块的,可以直接加进去用来着。
无线模块有关的库函数调用
NRF24L01初始化函数,因为是原子的代码,MINI板的测试代码,
这里NRF24L01也是使用的SPI1,和W25Q64以及SD卡等共用一个SPI接口,所以在使用的时候,他们分时复用SPI1。所以需要把SD卡和W25Q64的片选信号置高,以防止这两个器件对NRF24L01的通信造成干扰。所以也对没有用到的脚进行了拉高处理,就是代码中的A2,A3脚。所以自己实际在用的过程中可以不去处理这两个脚。emmmm大佬们都是可以自己写的,我只会拉人家的来用~(卑微)
void NRF24L01_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_4);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4);
SPI1_Init(); //初始化 SPI
SPI_Cmd(SPI1, DISABLE); //
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
//设置 SPI 单向或者双向的数据模式:SPI 设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主 SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 8 位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟悬空低电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获于第一个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //内部 NSS 信号有 SSI 位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
//定义波特率预分频的值:波特率预分频值为 256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从 MSB 位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC 值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //初始化外设 SPIx 寄存器
NRF24L01_CE=0; //使能 24L01
NRF24L01_CSN=1; //SPI 片选取消
}//检测 24L01 是否存在
//返回值:0,成功;1,失败
然后是模式设置,就是上面第三点所说的,如下是接收模式
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
//写 RX 节点地址
NRF24L01_Write_Reg(WRITE_REG+EN_AA,0x01); //使能通道 0 的自动应答
NRF24L01_Write_Reg(WRITE_REG+EN_RXADDR,0x01);//使能通道 0 的接收地址
NRF24L01_Write_Reg(WRITE_REG+RF_CH,40); //设置 RF 通信频率
NRF24L01_Write_Reg(WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);
//选择通道 0 的有效数据宽度
NRF24L01_Write_Reg(WRITE_REG+RF_SETUP,0x0f);
//设置 TX 发射参数,0db 增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(WRITE_REG+CONFIG, 0x0f);
//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
NRF24L01_CE = 1; //CE 为高,进入接收模式
}
还有发送模式
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);
//写 TX 节点地址
NRF24L01_Write_Buf(WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
//设置 TX 节点地址,主要为了使能 ACK
NRF24L01_Write_Reg(WRITE_REG+EN_AA,0x01); //使能通道 0 的自动应答
NRF24L01_Write_Reg(WRITE_REG+EN_RXADDR,0x01); //使能通道 0 的接收地址
NRF24L01_Write_Reg(WRITE_REG+SETUP_RETR,0x1a);
//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10 次
NRF24L01_Write_Reg(WRITE_REG+RF_CH,40); //设置 RF 通道为 40
NRF24L01_Write_Reg(WRITE_REG+RF_SETUP,0x0f);
//设置 TX 发射参数,0db 增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(WRITE_REG+CONFIG,0x0e);
//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE=1;//CE 为高,10us 后启动发送
}
模式确定完了就要写具体的收发流程,如果是接受模式,那接收流程如下
u8 NRF24L01_RxPacket(u8 *rxbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi 速度为 9Mhz
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(WRITE_REG+STATUS,sta); //清除 TX_DS 或 MAX_RT 中断标志
if(sta&RX_OK)//接收到数据
{
NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除 RX FIFO 寄存器
return 0;
}
return 1;//没收到任何数据
}
若为发送模式,发送流程为
u8 NRF24L01_TxPacket(u8 *txbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8);//spi 速度为 9Mhz
NRF24L01_CE=0;
NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH); //写数据到 TX BUF
NRF24L01_CE=1; //启动发送
while(NRF24L01_IRQ!=0); //等待发送完成
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(WRITE_REG+STATUS,sta); //清除 TX_DS 或 MAX_RT 中断标志
if(sta&MAX_TX)//达到最大重发次数
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除 TX FIFO 寄存器
return MAX_TX;
}
if(sta&TX_OK) return TX_OK;//发送完成
return 0xff;//其他原因发送失败
}
接收和发送的操作是基于用spi的通信方式对无线模块寄存器的读和写的操作,所以,spi读写寄存器的指令如下
u8 NRF24L01_Write_Reg(u8 reg,u8 value)
{
u8 status;
NRF24L01_CSN=0; //使能 SPI 传输
status =SPI2_ReadWriteByte(reg);//发送寄存器号
SPI2_ReadWriteByte(value); //写入寄存器的值
NRF24L01_CSN=1; //禁止 SPI 传输
return(status); //返回状态值
}
u8 NRF24L01_Read_Reg(u8 reg)
{
u8 reg_val;
NRF24L01_CSN = 0; //使能 SPI 传输
SPI2_ReadWriteByte(reg); //发送寄存器号
reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容
NRF24L01_CSN = 1; //禁止 SPI 传输
return(reg_val); //返回状态值
}
指令发送了,就是说好啦,寄存器,我要开始对你进行读写数据了,然后就是对寄存器里面的数据进行读写
读寄存器的值
u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能 SPI 传输
status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0;u8_ctr像寄存器写入数据
u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能 SPI 传输
status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0; u8_ctr这就是关于无线模块24L01的数据传输的函数部分了,最后我们还要写一个自检函数,这个是为了检测能不能检测到有24l01的存在
u8 NRF24L01_Check(void)
{
u8 buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5}; u8 i;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi 速度为 9Mhz
NRF24L01_Write_Buf(WRITE_REG+TX_ADDR,buf,5);//写入 5 个字节的地址.
NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址
for(i=0;i<5;i++)if(buf[i]!=0XA5)break;
if(i!=5)return 1;//检测 24L01 错误
return 0; //检测到 24L01
}
好啦,然后就可以写一个主函数来检测是否能够通信啦~~~~