pytorch搭建并训练模型的套路
pytorch搭建并训练模型的套路
pytorch搭建模型一般可分为以下几个步骤:
- 数据预处理
- 搭建模型
- 训练模型
其中1、2无明显顺序之分。
1.搭建网络
pytorch为我们提供了非常方便的nn工具箱,我们搭建模型只需要定义一个继承自nn.module的类并实现其init和forward方法就可。init方法中动态绑定成员变量,forword方法中决定数据流经这些成员变量的顺序。下面是nn工具箱的结构示意图(来自网络,侵权删)。
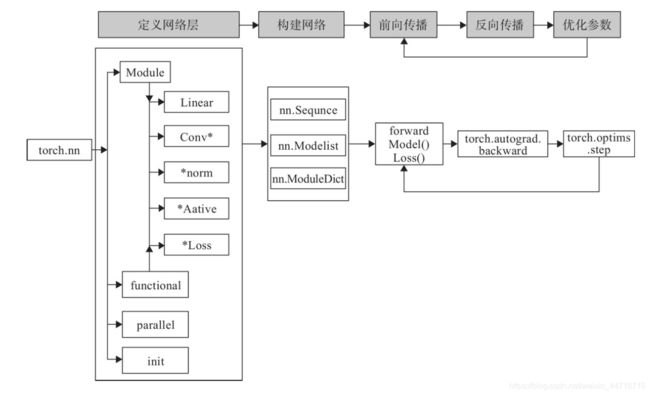
接着看上图,nn.Module中的大多数Layer在functional中都有对应的函数,区别在于Layer是继承nn.Module的类,会自动提取可学习的参数,而nn.functional更像是纯函数,所以像卷积层、全连接层、Dropout层等因含有可学习参数,一般使用nn.Module,而激活函数、池化层可使用functional中对于的函数。下面以非常经典的Resnet18为例,用pytorch搭建一个简单的网络。
如上图(来自网络,侵权删)所示,左边是Resnet18的网络结构图,右边是Resnet50的网络结构图,大家可以模仿下面给出的Resnet18的代码搭建Resnet50。
构建最基本ResBlk块
如上图所示,整个网络结构图中有很多输入和输出连接到一起的块,这根连接输入和输出的线姑且称作跳接线,实线表示输入维度和输出维度一样不需要升维,而虚线表示输入和输出维度不一样需要升维。这个ResBlk的最基本的结构就是卷积之后批归一化重复两遍。为了处理输入输出维度不一样,可以设置一个extra层,来进行升维。至于这个基本块的形式参数的设置,观察网络结构图可以看出,第二个卷积的stride总是为1,而第一个卷积块的stride会因为虚实线的不同有所差异,故stride定为一个默认为1的形式参数,还会发生变化的就是输入和输出的特征层个数,因此也定为形式参数,至于padding,需要升维层为0,其他都为1,不需定为形参。下面给出代码:
# 需要导入的包
import torch
from torch import nn
from torch.nn import functional as F
ResBlk块
class ResBlk(nn.Module):
def __init__(self, ch_in, ch_out, stride=1):
super(ResBlk, self).__init__()
# 卷积之后批归一化
self.conv1 = nn.Conv2d(in_channels=ch_in, out_channels=ch_out, kernel_size=3, stride=stride, padding=1)
self.bn1 = nn.BatchNorm2d(num_features=ch_out)
self.conv2 = nn.Conv2d(in_channels=ch_out, out_channels=ch_out, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(num_features=ch_out)
# 若输入输出不一样则需要升维
self.extra = nn.Sequential()
if ch_out != ch_in:
self.extra = nn.Sequential(
nn.Conv2d(in_channels=ch_in, out_channels=ch_out, kernel_size=1, stride=stride),
nn.BatchNorm2d(num_features=ch_out)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out = self.extra(x) + out
return F.relu(out)
搭建Resnet18
有了ResBlk块我们就可以更方便搭建网络了,还是看上面的Resnet18的网络结构图,首先经过一个卷积和池化,再经过两个基本ResBlk块,循环3次接一个升维的ResBlk块后接一个基本ResBlk块,最后平均池化后加全连接得到输出。下面看代码:
class ResNet18(nn.Module):
def __init__(self, num_classes):
super(ResNet18, self).__init__()
self.conv = nn.Sequential( #经过一个卷积层和一个池化层
nn.Conv2d(in_channels=3, out_channels=64, kernel_size=7, stride=2, padding=3),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# 两个基本的ResBlk块
for i in range(2):
self.conv.add_module(name='ResBlk' + chr(i), module=ResBlk(ch_in=64, ch_out=64, stride=1))
# 一个升维的ResBlk块后接一个基本ResBlk块
self.conv.add_module(name='ResBlk2', module=ResBlk(ch_in=64, ch_out=128, stride=2))
self.conv.add_module(name='ResBlk3', module=ResBlk(ch_in=128, ch_out=128, stride=1))
# 一个升维的ResBlk块后接一个基本ResBlk块
self.conv.add_module(name='ResBlk4', module=ResBlk(ch_in=128, ch_out=256, stride=2))
self.conv.add_module(name='ResBlk5', module=ResBlk(ch_in=256, ch_out=256, stride=1))
# 一个升维的ResBlk块后接一个基本ResBlk块
self.conv.add_module(name='ResBlk6', module=ResBlk(ch_in=256, ch_out=512, stride=2))
self.conv.add_module(name='ResBlk7', module=ResBlk(ch_in=512, ch_out=512, stride=1))
self.outlayer = nn.Linear(in_features=512, out_features=num_classes)
def forward(self, x):
x = F.relu(self.conv(x))
x = F.adaptive_avg_pool2d(x, [1, 1])
x = x.view(x.size(0), -1)
x = self.outlayer(x)
return x
至此一个简单的Resnet18的模型就搭建完了,下面做一个简单的测试:
def main():
x = torch.randn(2, 3, 224, 224) # 两张三通道(RGB)224 * 224大小的图片
model = ResNet18(num_classes=5)
out = model(x)
print('ResNet18:', out.shape)
p = sum(map(lambda p : p.numel(), model.parameters())) # map的第二个参数是一个可迭代对象,numel()获取tensor中包含多少个元素
print('parameters size:', p)
if __name__ == "__main__":
main()
######################################################
# 输出结果
# ResNet18: torch.Size([2, 5])
# parameters size: 11109637
######################################################
# 得到的是两张五分类的输出,说明我们网络结构没有结构上的错误
模型搭建就介绍到这里,下面开始介绍数据的预处理和模型的训练。
2.数据的预处理
这里以分类任务为例简单的介绍一下如何用pytorch来进行数据预处理。pytorch在内的框架都自带了一些简单的数据集,加载那些自带的数据集调用诸如load之类的方法就可以了,这里介绍的主要是对自有数据集的处理。
以我电脑上的一个数据集为例:

pokemon是数据集的根目录,有五个子目录,每个子目录代表着不同种类的pokemon,子目录中有若干张属于这个类别的图片。
首先导入需要的包:
import torch
import os, glob
import random, csv
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
from PIL import Image
实现数据加载最好的方法就是创建一个继承自torch.utils.data.Dataset的类,并实现init,len和getitem方法,我们不妨叫这个用于数据加载的类为Pokemon,代码结构如下:
class Pokemon(Dataset):
def __init__(self):
pass
def __len__(self):
pass
def __getitem__(self, idx):
pass
init
在构造函数中,我们可以把类名映射到0~4以方便训练,以及划分出训练集、验证集还有测试集,我们需要三个形式参数,根路径,图片大小,模式,分别记为root、resize还有mode。我们用一个辅助函数load_csv来获取图片的路径,以便划分训练集、验证集还有测试集。load_csv代码如下:
def load_csv(self, filename): # filename为将要保存的csv文件名
if not os.path.exists(os.path.join(self.root, filename)):
images = []
# 将所有图片的路径放到images这个列表中
for name in self.name2label.keys():
images += glob.glob(os.path.join(self.root, name, '*.png')) #glob.glob返回所有匹配的文件路径列表
images += glob.glob(os.path.join(self.root, name, '*.jpg'))
images += glob.glob(os.path.join(self.root, name, '*.jpeg'))
images += glob.glob(os.path.join(self.root, name, '*.gif'))
random.shuffle(images)
with open(os.path.join(self.root, filename), mode='w', newline='') as f:
writer = csv.writer(f)
for img in images: # eg. img == pokemon\pikachu\00000000.jpg
name = img.split(os.sep)[-2] # name == pikachu
label = self.name2label[name] # label == 3
writer.writerow([img, label]) # pokemon\pikachu\00000000.jpg 3
print('written into csv file:', filename)
images, labels = [], []
with open(os.path.join(self.root, filename)) as f:
reader = csv.reader(f)
for row in reader:
img, label = row
label = int(label) # 字符转为整型
images.append(img)
labels.append(label)
assert len(images) == len(labels)
return images, labels # 返回图片路径列表和对应的标签列表
通过load_csv我们可以得到图片路径列表和对应的标签列表,再根据mode划分数据集就可了,完整的init代码如下:
def __init__(self, root, resize, mode):
super(Pokemon, self).__init__()
self.root = root
self.resize = resize
# 将不同类别映射到0~4
self.name2label = {}
for name in sorted(os.listdir(root)): # 排序使得每次初始化时调用listdir返回的列表顺序相同
if not os.path.isdir(os.path.join(root, name)): # 不是目录则跳过
continue
self.name2label[name] = len(self.name2label.keys()) # 用长度来当作映射的值
self.images, self.labels = self.load_csv('images')
if mode == 'train':
self.images = self.images[:int(0.6 * len(self.images))]
self.labels = self.labels[:int(0.6 * len(self.labels))]
elif mode == 'val':
self.images = self.images[int(0.6 * len(self.labels)):int(0.8 * len(self.images))]
self.labels = self.labels[int(0.6 * len(self.labels)):int(0.8 * len(self.images))]
else:
self.images = self.images[int(0.8 * len(self.images)):]
self.labels = self.labels[int(0.8 * len(self.labels)):]
len
这个太简单了,直接看代码:
def __len__(self):
return len(self.images)
getitem
返回实实在在的图片和标签而不是路径和标签。
代码如下:
def __getitem__(self, key):
img, label = self.images[key], self.labels[key]
# 一些数据增强
trans = transforms.Compose([
lambda x: Image.open(x).convert('RGB'),
transforms.Resize((int(self.resize * 1.25), int(self.resize * 1.25))),
transforms.RandomRotation(15),
transforms.CenterCrop(self.resize),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
img = trans(img)
label = torch.tensor(label)
return img, label
以上就是简单的数据预处理的全部步骤啦,要是你的数据集的结构和我上面提到的完全一样,pytorch还提供了一个api让你直接进行加载而不需要写这么多,但是如果你要是想定制,可以修改我上述的代码。api是:
db = torchvision.datasets.ImageFolder(root='pokemon', transform=trans)
######################################################################
# 上面这一行代码就实现了我数据预处理这一块写的全部了,/(ㄒoㄒ)/~~,等同于我自己调用自己的代码如下:
######################################################################
db = Pokemon('pokemon', 224, 'train')
数据预处理这一块的最后的最后就是将数据分batch打包,就结束了,api如下:
loader = DataLoader(db, batch_size=32, shuffle=True, num_workers=8)
3.训练模型
先做一些基础工作:
batchsz = 32
lr = 1e-3
epochs = 100
device = torch.device('cuda') # 实例化"一块显卡",如果没有显卡就注释掉这行和下面涉及cuda这个词的代码。
train_db = Pokemon('pokemon', 224, mode='train')
val_db = Pokemon('pokemon', 224, mode='val')
test_db = Pokemon('pokemon', 224, mode='test')
train_loader = DataLoader(train_db, batch_size=batchsz, shuffle=True, num_workers=8)
val_loader = DataLoader(val_db, batch_size=batchsz, num_workers=4)
test_loader = DataLoader(test_db, batch_size=batchsz, num_workers=4)
训练部分
def train():
# 创建模型并搬到显卡上
model = ResNet18(5).to(device)
# 创建优化器
optimizer = optim.Adam(model.parameters(), lr=lr)
# 创建损失函数
criterion = nn.CrossEntropyLoss()
best_acc, best_epoch = 0, 0
global_step = 0 # 一个epoch 共global_step次更新参数
# 开始训练
for epoch in range(epochs):
for step, (x, y) in enumerate(train_loader):
x, y = x.to(device), y.to(device) # 搬到显卡上
# 前向传播,并计算损失
logits = model(x)
loss = criterion(logits, y)
# 梯度清零,反向传播,更新参数
optimizer.zero_grad()
loss.backward()
optimizer.step()
global_step += 1
return best_acc, best_epoch
验证测试部分
if epoch % 2 == 0: # 每两个epoch进行一次验证
val_acc = evaluate(model, val_loader)
if val_acc > best_acc:
best_epoch = epoch
best_acc = val_acc
torch.save(model.state_dict(), 'best.mdl') # 将最好的模型保存(后缀随便)
evaluate函数如下:
def evaluate(model, loader):
correct = 0
total = len(loader.dataset)
for x, y in loader:
x, y = x.to(device), y.to(device)
with torch.no_grad():
logits = model(x)
pred = logits.argmax(dim=1)
correct = torch.eq(pred, y).sum().float().item()
return correct / total
至此我们就可以开始训练模型了:
def main():
best_acc, best_epoch = train()
# 加载最佳模型
model.load_state_dict(torch.load('best.mdl'))
print('loaded from ckpt')
# 测试集上测试
test_acc = evaluate(model, test_loader)
print('test acc:', test_acc)
代码地址及数据集地址
数据集:链接:https://pan.baidu.com/s/1sZYuyTHYzPmTcgg1B9DvbA 提取码:duwb (数据集来自网络,侵删)
代码:https://github.com/RuicongWong/pytorch