【C++】set和map的底层结构(AVL树&红黑树)
文章目录
- 一、前言
- 二、AVL 树
-
- 1.AVL树的概念
- 2.AVL树节点的定义
- 3.AVL树的插入
- 4.AVL树的旋转
- 5.AVL树的验证
- 6.AVL树的删除、AVL树的性能
- 三、红黑树
-
- 1.红黑树的概念
- 2.红黑树的性质
- 3.红黑树节点的定义
- 4.红黑树结构
- 5.红黑树的插入操作
- 6.红黑树的验证
- 7.红黑树与AVL树比较
- 四、红黑树模拟实现STL中的map与set
-
- 1.红黑树的迭代器
- 2.改造红黑树
- 3.map的模拟实现
- 4.set的模拟实现
一、前言
前面对map/multimap/set/multiset进行了简单的介绍,在其文档介绍中发现,这几个容器有个共同点是:其底层都是按照二叉搜索树来实现的,但是二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N),因此map、set等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树来实现。
二、AVL 树
1.AVL树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)

如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。
2.AVL树节点的定义
AVL树节点的定义:
template<class T>
struct AVLTreeNode
{
AVLTreeNode(const T& data)
: _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr)
, _data(data), _bf(0)
{}
AVLTreeNode<T>* _pLeft; // 该节点的左孩子
AVLTreeNode<T>* _pRight; // 该节点的右孩子
AVLTreeNode<T>* _pParent; // 该节点的双亲
T _data;
int _bf; // 该节点的平衡因子
};
3.AVL树的插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
bool Insert(const T& data)
{
// 1. 先按照二叉搜索树的规则将节点插入到AVL树中
// ...
// 2. 新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,并检测是否
//破坏了AVL树的平衡性
/*
pCur插入后,pParent的平衡因子一定需要调整,在插入之前,pParent
的平衡因子分为三种情况:-1,0, 1, 分以下两种情况:
1. 如果pCur插入到pParent的左侧,只需给pParent的平衡因子-1即可
2. 如果pCur插入到pParent的右侧,只需给pParent的平衡因子+1即可
此时:pParent的平衡因子可能有三种情况:0,正负1, 正负2
1. 如果pParent的平衡因子为0,说明插入之前pParent的平衡因子为正负1,插入后被调整
成0,此时满足
AVL树的性质,插入成功
2. 如果pParent的平衡因子为正负1,说明插入前pParent的平衡因子一定为0,插入后被更
新成正负1,此
时以pParent为根的树的高度增加,需要继续向上更新
3. 如果pParent的平衡因子为正负2,则pParent的平衡因子违反平衡树的性质,需要对其进
行旋转处理
*/
while (pParent)
{
// 更新双亲的平衡因子
if (pCur == pParent->_pLeft)
pParent->_bf--;
else
pParent->_bf++;
// 更新后检测双亲的平衡因子
if (0 == pParent->_bf)
{
break;
}
else if (1 == pParent->_bf || -1 == pParent->_bf)
{
// 插入前双亲的平衡因子是0,插入后双亲的平衡因为为1 或者 -1 ,说明以双亲
为根的二叉树
// 的高度增加了一层,因此需要继续向上调整
pCur = pParent;
pParent = pCur->_pParent;
}
else
{
// 双亲的平衡因子为正负2,违反了AVL树的平衡性,需要对以pParent
// 为根的树进行旋转处理
if (2 == pParent->_bf)
{
// ...
}
else
{
// ...
}
}
}
return true;
}
4.AVL树的旋转
如果在一棵原本是平衡的AVL树中插入一个新节点,可能造成不平衡,此时必须调整树的结构,使之平衡化。
旋转的目的:
- 让这颗子树的高度不超过1(降低子树高度);
- 旋转过程中继续保持它是搜索树;
- 更新孩子节点的平衡因子;
根据节点插入位置的不同,AVL树的旋转分为四种:
- 1.新节点插入较高左子树的左侧—左左:右单旋

/*
上图在插入前,AVL树是平衡的,新节点插入到30的左子树(注意:此处不是左孩子)中,30左
子树增加
了一层,导致以60为根的二叉树不平衡,要让60平衡,只能将60左子树的高度减少一层,右子
树增加一层,
即将左子树往上提,这样60转下来,因为60比30大,只能将其放在30的右子树,而如果30有
右子树,右子树根的值一定大于30,小于60,只能将其放在60的左子树,旋转完成后,更新节点
的平衡因子即可。在旋转过程中,有以下几种情况需要考虑:
1. 30节点的右孩子可能存在,也可能不存在
2. 60可能是根节点,也可能是子树
如果是根节点,旋转完成后,要更新根节点
如果是子树,可能是某个节点的左子树,也可能是右子树
同学们再此处可举一些详细的例子进行画图,考虑各种情况,加深旋转的理解
*/
void _RotateR(PNode pParent)
{
// pSubL: pParent的左孩子
// pSubLR: pParent左孩子的右孩子,
PNode pSubL = pParent->_pLeft;
PNode pSubLR = pSubL->_pRight;
// 旋转完成之后,30的右孩子作为双亲的左孩子
pParent->_pLeft = pSubLR;
// 如果30的左孩子的右孩子存在,更新亲双亲
if (pSubLR)
pSubLR->_pParent = pParent;
// 60 作为 30的右孩子
pSubL->_pRight = pParent;
// 因为60可能是棵子树,因此在更新其双亲前必须先保存60的双亲
PNode pPParent = pParent->_pParent;
// 更新60的双亲
pParent->_pParent = pSubL;
// 更新30的双亲
pSubL->_pParent = pPParent;
// 如果60是根节点,根新指向根节点的指针
if (NULL == pPParent)
{
_pRoot = pSubL;
pSubL->_pParent = NULL;
}
else
{
// 如果60是子树,可能是其双亲的左子树,也可能是右子树
if (pPParent->_pLeft == pParent)
pPParent->_pLeft = pSubL;
else
pPParent->_pRight = pSubL;
}
// 根据调整后的结构更新部分节点的平衡因子
pParent->_bf = pSubL->_bf = 0;
}
- 2.新节点插入较高右子树的右侧—右右:左单旋

实现及情况考虑可参考右单旋。
- 3.新节点插入较高左子树的右侧—左右:先左单旋再右单旋
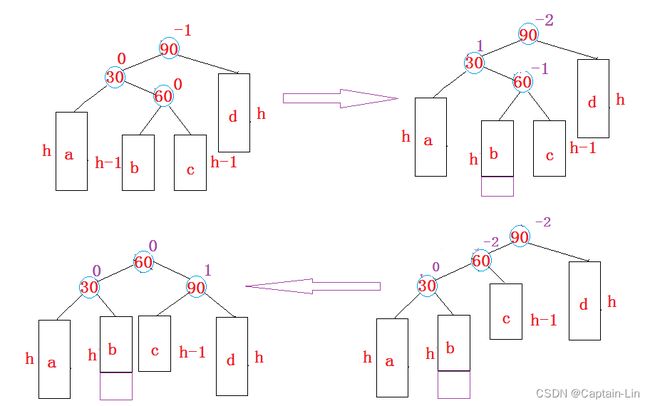
将双旋变成单旋后再旋转,即:先对30进行左单旋,然后再对90进行右单旋,旋转完成后再考虑平衡因子的更新。
// 旋转之前,60的平衡因子可能是-1/0/1,旋转完成之后,根据情况对其他节点的平衡因子进
// 行调整
void _RotateLR(PNode pParent)
{
PNode pSubL = pParent->_pLeft;
PNode pSubLR = pSubL->_pRight;
// 旋转之前,保存pSubLR的平衡因子,旋转完成之后,需要根据该平衡因子来调整其他节
// 点的平衡因子(pSubLR: pParent左孩子的右孩子)
int bf = pSubLR->_bf;
// 先对30进行左单旋
_RotateL(pParent->_pLeft);
// 再对90进行右单旋
_RotateR(pParent);
if (1 == bf)
pSubL->_bf = -1;
else if (-1 == bf)
pParent->_bf = 1;
}
- 4.新节点插入较高右子树的左侧—右左:先右单旋再左单旋

参考右左双旋。
总结:
假如以pParent为根的子树不平衡,即pParent的平衡因子为2或者-2,分以下情况考虑
-
pParent的平衡因子为2,说明pParent的右子树高,设pParent的右子树的根为pSubR
- 当pSubR的平衡因子为1时,执行左单旋
- 当pSubR的平衡因子为-1时,执行右左双旋
-
pParent的平衡因子为-2,说明pParent的左子树高,设pParent的左子树的根为pSubL
- 当pSubL的平衡因子为-1是,执行右单旋
- 当pSubL的平衡因子为1时,执行左右双旋
旋转完成后,原pParent为根的子树个高度降低,已经平衡,不需要再向上更新。
5.AVL树的验证
AVL树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证AVL树,可以分两步:
- 验证其为二叉搜索树
- 如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
- 验证其为平衡树
- 每个节点子树高度差的绝对值不超过1(注意节点中如果没有平衡因子)
- 节点的平衡因子是否计算正确
- 验证用例
- 略
6.AVL树的删除、AVL树的性能
- AVL树的删除(了解)
因为AVL树也是二叉搜索树,可按照二叉搜索树的方式将节点删除,然后再更新平衡因子,只不错与删除不同的时,删除节点后的平衡因子更新,最差情况下一直要调整到根节点的位置。
- AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
三、红黑树
1.红黑树的概念
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。
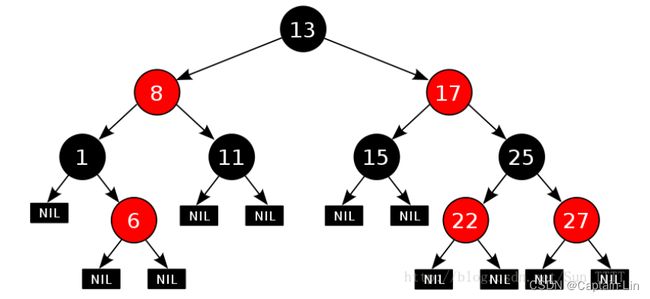
2.红黑树的性质
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点(每条路径上都包含相同数目的黑色节点)
- 每个叶子结点都是黑色的(此处的叶子结点指的是
空结点)
思考:为什么满足上面的性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍?
答:因为组织结构已经确定(构成树的黑色节点一定,红色节点只能在黑色节点之间),无论如何填充红色节点都不会超过全黑节点路径的两倍。
3.红黑树节点的定义
// 节点的颜色
enum Color { RED, BLACK };
// 红黑树节点的定义
template<class ValueType>
struct RBTreeNode
{
RBTreeNode(const ValueType& data = ValueType(),Color color = RED)
: _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr)
, _data(data), _color(color)
{}
RBTreeNode<ValueType>* _pLeft; // 节点的左孩子
RBTreeNode<ValueType>* _pRight; // 节点的右孩子
RBTreeNode<ValueType>* _pParent; // 节点的双亲(红黑树需要旋转,为了实现简单给出该字段)
ValueType _data; // 节点的值域
Color _color; // 节点的颜色
};
思考:在节点的定义中,为什么要将节点的默认颜色给成红色的?
答:违背规则3的代价比违背规则4的代价更小(红黑树的性质)。
4.红黑树结构
为了后续实现关联式容器简单,红黑树的实现中增加一个头结点,因为跟节点必须为黑色,为了与根节点进行区分,将头结点给成黑色,并且让头结点的 pParent域指向红黑树的根节点,pLeft域指向红黑树中最小的节点,_pRight域指向红黑树中最大的节点,如下:

5.红黑树的插入操作
红黑树是在二叉搜索树的基础上加上其平衡限制条件,因此红黑树的插入可分为两步:
- 按照二叉搜索的树规则插入新节点
template<class ValueType>
class RBTree
{
//……
bool Insert(const ValueType& data)
{
PNode& pRoot = GetRoot();
if (nullptr == pRoot)
{
pRoot = new Node(data, BLACK);
// 根的双亲为头节点
pRoot->_pParent = _pHead;
_pHead->_pParent = pRoot;
}
else
{
// 1. 按照二叉搜索的树方式插入新节点
// 2. 检测新节点插入后,红黑树的性质是否造到破坏,
// 若满足直接退出,否则对红黑树进行旋转着色处理
}
// 根节点的颜色可能被修改,将其改回黑色
pRoot->_color = BLACK;
_pHead->_pLeft = LeftMost();
_pHead->_pRight = RightMost();
return true;
}
private:
PNode& GetRoot() { return _pHead->_pParent; }
// 获取红黑树中最小节点,即最左侧节点
PNode LeftMost();
// 获取红黑树中最大节点,即最右侧节点
PNode RightMost();
private:
PNode _pHead;
};
- 检测新节点插入后,红黑树的性质是否造到破坏
因为新节点的默认颜色是红色,因此:如果其双亲节点的颜色是黑色,没有违反红黑树任何性质,则不需要调整;但当新插入节点的双亲节点颜色为红色时,就违反了性质三不能有连在一起的红色节点,此时需要对红黑树分情况来讨论:
-
约定:
cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点 -
情况一: cur为红,p为红,g为黑,u存在且为红
注:下图右边的树为我们的修改目标

总结:解决方式:将p,u改为黑,g改为红,然后把g当成cur,继续向上调整。
- 情况二: cur为红,p为红,g为黑,u不存在/u存在且为黑

总结:p为g的左孩子,cur为p的左孩子,则进行右单旋转;相反,p为g的右孩子,cur为p的右孩子,则进行左单旋转;p、g变色–p变黑,g变红
- 情况三: cur为红,p为红,g为黑,u不存在/u存在且为黑

总结:p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;相反,p为g的右孩子,cur为p的左孩子,则针对p做右单旋转;则转换成了情况2
6.红黑树的验证
红黑树的检测分为两步:
- 检测其是否满足二叉搜索树(中序遍历是否为有序序列)
- 检测其是否满足红黑树的性质
bool IsValidRBTree()
{
PNode pRoot = GetRoot();
// 空树也是红黑树
if (nullptr == pRoot)
return true;
// 检测根节点是否满足情况
if (BLACK != pRoot->_color)
{
cout << "违反红黑树性质二:根节点必须为黑色" << endl;
return false;
}
// 获取任意一条路径中黑色节点的个数
size_t blackCount = 0;
PNode pCur = pRoot;
while (pCur)
{
if (BLACK == pCur->_color)
blackCount++;
pCur = pCur->_pLeft;
}
// 检测是否满足红黑树的性质,k用来记录路径中黑色节点的个数
size_t k = 0;
return _IsValidRBTree(pRoot, k, blackCount);
}
bool _IsValidRBTree(PNode pRoot, size_t k, const size_t blackCount)
{
//走到null之后,判断k和black是否相等
if (nullptr == pRoot)
{
if (k != blackCount)
{
cout << "违反性质四:每条路径中黑色节点的个数必须相同" << endl;
return false;
}
return true;
}
// 统计黑色节点的个数
if (BLACK == pRoot->_color)
k++;
// 检测当前节点与其双亲是否都为红色
PNode pParent = pRoot->_pParent;
if (pParent && RED == pParent->_color && RED == pRoot->_color)
{
cout << "违反性质三:没有连在一起的红色节点" << endl;
return false;
}
return _IsValidRBTree(pRoot->_pLeft, k, blackCount) &&
_IsValidRBTree(pRoot->_pRight, k, blackCount);
}
7.红黑树与AVL树比较
红黑树和AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是O( l o g 2 N log_2 N log2N),红黑树不追求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,所以在经常进行增删的结构中性能比AVL树更优,而且红黑树实现比较简单,所以实际运用中红黑树更多。
由于红黑树优秀的性能,它已经被应用于 C++ STL库 – map/set、mutil_map/mutil_set。
四、红黑树模拟实现STL中的map与set
1.红黑树的迭代器
迭代器的好处是可以方便遍历,是数据结构的底层实现与用户透明。如果想要给红黑树增加迭代器,需要考虑以前问题:
- begin() 与 end()
STL明确规定,begin()与end()代表的是一段前闭后开的区间,而对红黑树进行中序遍历后,可以得到一个有序的序列,因此:begin()可以放在红黑树中最小节点(即最左侧节点)的位置,end()放在最大节点(最右侧节点)的下一个位置,关键是最大节点的下一个位置在哪块?能否给成nullptr呢?答案是行不通的,因为对end()位置的迭代器进行–操作,必须要能找最后一个元素,此处就不行,因此最好的方式是将end()放在头结点的位置:

- operator++() 与 operator–()
// 找迭代器的下一个节点,下一个节点肯定比其大
void Increasement()
{
//分两种情况讨论:_pNode的右子树存在和不存在
// 右子树存在
if (_pNode->_pRight)
{
// 右子树中最小的节点,即右子树中最左侧节点
_pNode = _pNode->_pRight;
while (_pNode->_pLeft)
_pNode = _pNode->_pLeft;
}
else
{
// 右子树不存在,向上查找,直到_pNode != pParent->right
PNode pParent = _pNode->_pParent;
while (pParent->_pRight == _pNode)
{
_pNode = pParent;
pParent = _pNode->_pParent;
}
// 特殊情况:根节点没有右子树
if (_pNode->_pRight != pParent)
_pNode = pParent;
}
}
// 获取迭代器指向节点的前一个节点
void Decreasement()
{
//分三种情况讨论:_pNode 在head的位置,_pNode 左子树存在,_pNode 左子树不
存在
// 1. _pNode 在head的位置,--应该将_pNode放在红黑树中最大节点的位置
if (_pNode->_pParent->_pParent == _pNode && _pNode->_color == RED)
_pNode = _pNode->_pRight;
else if (_pNode->_pLeft)
{
// 2. _pNode的左子树存在,在左子树中找最大的节点,即左子树中最右侧节点
_pNode = _pNode->_pLeft;
while (_pNode->_pRight)
_pNode = _pNode->_pRight;
}
else
{
// _pNode的左子树不存在,只能向上找
PNode pParent = _pNode->_pParent;
while (_pNode == pParent->_pLeft)
{
_pNode = pParent;
pParent = _pNode->_pParent;
}
_pNode = pParent;
}
}
2.改造红黑树
- RBTree.h
#pragma once
enum Colour
{
RED,
BLACK,
};
template<class T>
struct RBTreeNode
{
T _data;
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Colour _col;
RBTreeNode(const T& data)
:_data(data)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
template<class T, class Ref, class Ptr>
struct __RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef __RBTreeIterator<T, Ref, Ptr> Self;
typedef __RBTreeIterator<T, T&, T*> iterator;
Node* _node;
__RBTreeIterator(Node* node)
:_node(node)
{}
// 普通迭代器的时候,他是拷贝构造
// const迭代器的时候,他是构造,支持用普通迭代器构造const迭代器
__RBTreeIterator(const iterator& s)
:_node(s._node)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
Self& operator++()
{
if (_node->_right)
{
Node* min = _node->_right;
while (min->_left)
{
min = min->_left;
}
_node = min;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
Self& operator--()
{
if (_node->_left)
{
Node* max = _node->_left;
while (max->_right)
{
max = max->_right;
}
_node = max;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
};
// map->RBTree, MapKeyOfT> _t;
// set->RBTree _t;
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef __RBTreeIterator<T, T& ,T*> iterator;
typedef __RBTreeIterator<T, const T&, const T*> const_iterator;
iterator begin()
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return iterator(left);
}
iterator end()
{
return iterator(nullptr);
}
const_iterator begin() const
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return const_iterator(left);
}
const_iterator end() const
{
return const_iterator(nullptr);
}
pair<iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return make_pair(iterator(_root), true);
}
KeyOfT kot;
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(iterator(cur), false);
}
}
cur = new Node(data);
Node* newnode = cur;
cur->_col = RED;
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
cur->_parent = parent;
}
else
{
parent->_left = cur;
cur->_parent = parent;
}
while (parent && parent->_col == RED)
{
Node* grandfater = parent->_parent;
if (parent == grandfater->_left)
{
Node* uncle = grandfater->_right;
// 情况一 uncle存在且为红
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (cur == parent->_left)
{
// 情况二
RotateR(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
// 情况三
RotateL(parent);
RotateR(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
else // (parent == grandfater->_right)
{
Node* uncle = grandfater->_left;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
// g
// p
// c
if (cur == parent->_right)
{
RotateL(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
// g
// p
// c
RotateR(parent);
RotateL(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return make_pair(iterator(newnode), true);;
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
Node* ppNode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
if (ppNode == nullptr)
{
_root = subR;
_root->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* ppNode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
//if (_root == parent)
if (ppNode == nullptr)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
}
void Inorder()
{
_Inorder(_root);
}
void _Inorder(Node* root)
{
if (root == nullptr)
return;
_Inorder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_Inorder(root->_right);
}
bool Check(Node* root, int blackNum, const int ref)
{
if (root == nullptr)
{
//cout << blackNum << endl;
if (blackNum != ref)
{
cout << "违反规则:本条路径的黑色节点的数量跟最左路径不相等" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "违反规则:出现连续红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
++blackNum;
}
return Check(root->_left, blackNum, ref)
&& Check(root->_right, blackNum, ref);
}
bool IsBalance()
{
if (_root == nullptr)
{
return true;
}
if (_root->_col != BLACK)
{
return false;
}
int ref = 0;
Node* left = _root;
while (left)
{
if (left->_col == BLACK)
{
++ref;
}
left = left->_left;
}
return Check(_root, 0, ref);
}
private:
Node* _root = nullptr;
};
template<class K>
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
void testRBTree()
{
RBTree<int, int, SetKeyOfT<int>> t;
RBTree<int, int, SetKeyOfT<int>>::const_iterator it = t.begin();
}
3.map的模拟实现
- Map.h
#pragma once
#include "RBTree.h"
namespace _map
{
template<class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
const_iterator begin() const
{
return _t.begin();
}
const_iterator end() const
{
return _t.end();
}
pair<iterator, bool> insert(const pair<const K, V>& kv)
{
return _t.Insert(kv);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = insert(make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
};
void test_map()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
map<int, int> m;
for (auto e : a)
{
m.insert(make_pair(e, e));
}
map<int, int>::iterator it = m.begin();
while (it != m.end())
{
//it->first++;
it->second++;
cout << it->first << ":" << it->second << endl;
++it;
}
cout << endl;
map<string, int> countMap;
string arr[] = { "ƻ", "", "㽶", "ݮ", "ƻ", "", "ƻ", "ƻ", "", "ƻ", "㽶", "ƻ", "㽶" };
for (auto& e : arr)
{
countMap[e]++;
}
for (auto& kv : countMap)
{
cout << kv.first << ":" << kv.second << endl;
}
}
}
4.set的模拟实现
- Set.h
#pragma once
#include "RBTree.h"
namespace _set
{
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator;
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;
iterator begin() const
{
return _t.begin();
}
iterator end() const
{
return _t.end();
}
// 20:21
pair<iterator, bool> insert(const K& key)
{
pair<typename RBTree<K, K, SetKeyOfT>::iterator, bool> ret = _t.Insert(key);
return pair<iterator, bool>(ret.first, ret.second);
}
private:
RBTree<K, K, SetKeyOfT> _t;
};
void test_set()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
set<int> s;
for (auto e : a)
{
s.insert(e);
}
set<int>::iterator it = s.begin();
while (it != s.end())
{
//*it += 10;
cout << *it << " ";
++it;
}
cout << endl;
for (auto e : s)
{
cout << e << " ";
}
cout << endl;
}
}
- Test.cpp
#include map和set的底层原理 的知识大概就讲到这里啦,博主后续会继续更新更多C++ 和 Linux的相关知识,干货满满,如果觉得博主写的还不错的话,希望各位小伙伴不要吝啬手中的三连哦!你们的支持是博主坚持创作的动力!