算法设计与分析复习
算法设计与分析复习
- ch1 绪论
- ch2 数学基础
-
-
- 复杂性函数的阶
-
- ch3 分治法
-
-
- 分治法的设计步骤
- 最大子数组问题
- 最大值最小值问题
- 中位数(第i大的数)问题
-
- ch4 动态规划
-
-
- 设计步骤
- 矩阵链乘问题---划分动态规划
- 最长公共子序列问题---前缀动态规划
- 0-1背包
-
- ch5 贪心算法
-
-
- 设计步骤
- 任务安排问题
- 哈夫曼编码
-
- ch6 树搜索
-
-
- 基础--深度优先与广度优先
- 爬山法
- Best-First
- 分支界限
- 用分支界限解决问题的例子
-
- 人员安排问题
- 旅行商问题
- A*算法
-
- ch7 平摊分析
-
-
- 聚集方法
- 会计方法
- 势能方法
- 动态表---3n
-
- ch8 网络流--最大流和最小割
- ch9 字符串匹配
-
-
- Rabin-karp算法
- KMP算法
- BMH算法
-
ch1 绪论
算法:有穷性、确定性、能行性、有输入、有输出
ch2 数学基础
复杂性函数的阶
阶为复杂性函数的主导项
同阶函数 f(n)=θ(g(n))
∃c1 c2 >0 对∀n>n0 有 c1g(n)≤f(n)≤c2g(n)
保证高阶项相同即可 渐进紧界
低级函数 f(n)=O(g(n)) 渐进上界
高阶函数 f(n)=Ω(g(n)) 渐进下界
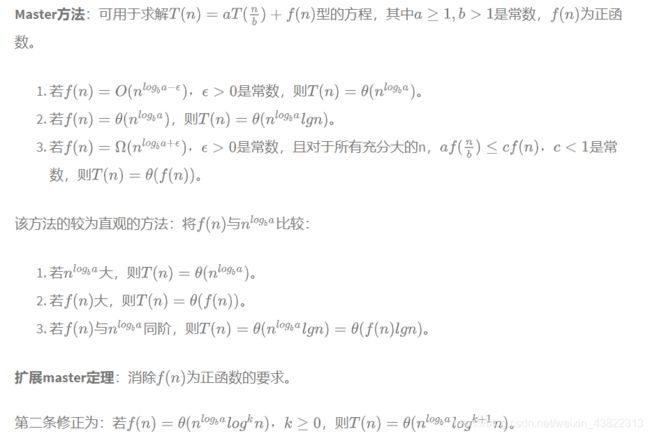
master定理
ch3 分治法
分治法的设计步骤
分解:将原问题划分为一些子问题,子问题与原问题形式一样(以便递归求解),只是规模更小
解决:递归的求解子问题,如果子问题的规模足够小则停止递归,直接求解
合并:将子问题的解组合为原问题的解
有时要求解与原问题形式不完全一样的问题,我们将这种情况看成合并的一部分
最大子数组问题
输入:数组A[]
输出:数组A的最大子数组
分治思想:为了求救数组A[]的最大子数组,我们把A[]从中间分成两部分 A的最大子数组就只有三种情况:在mid左,在mid右,跨过mid,前两个是原问题的子问题,第三个不是,所以我们需要解决第三个问题,解决后,即可很容易的完成此问题
最大值最小值问题
输入:数组A
输出:A的最大值和最小值
把A分成两部分,找这两部分中的Max和Min (递归情况)
直到划分后的数组大小为2或1(基本情况)


中位数(第i大的数)问题
输入:数组A
输出:数组A的中位数
分解:把A数组分解成若干的子数组,子数组的规模一般可以取5
找到这若干个子数组中位数
合并:求出若干子数组中位数的中位数,并按照此中位数m对数组A进行划分,小于m的在左,大于m的在右,划分后m的下表为k
如果k=i,返回A[k]
如果k>i,在左面那部分选择第i大的数
如果k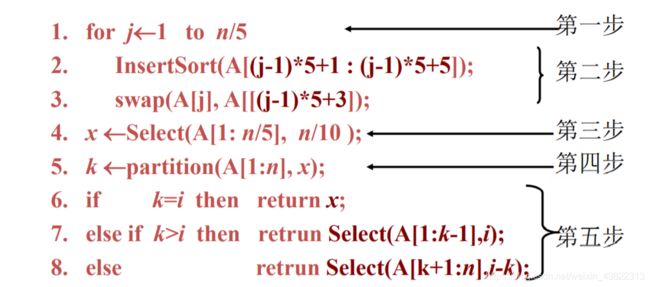
ch4 动态规划
设计步骤
1.刻画一个最优解的结构特征
2.递归的定义最优解的值
3.计算最优解的值,通常采用自底向上的方法
4.利用计算出的信息构造一个最优解
最优子结构
问题的最优解由相关子问题的最优解组合而成,而这些子问题可以独立求解
例:钢条切割问题中,把长度为n的钢条第一次切割后,出现两段钢条,原钢条的最大收益可由第一次切割后两段钢条的最大收益相加得到,且这两段钢条的最大收益可以独立求解
用反证法证明最优子结构
重复子问题
在问题的求解过程中很多子问题的解被重复使用
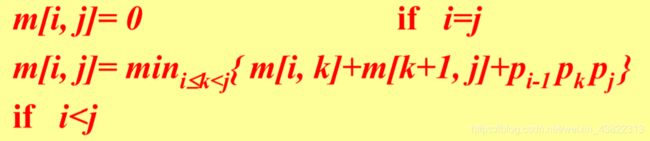
矩阵链乘问题—划分动态规划
1.分析优化解(最优解)结构—原问题最优解由子问题最优解组合而成、子问题最优解可以独立计算。在本题中Ai…j=Ai…k×Ak+1…j
可以说明重叠子问题
2.递归定义最优解
自底向上,按照最优解的结构进行定义
3.计算最优代价
自底向上进行计算,确定计算m[i,j]需要访问哪些表项

n=p.length-1
let m=[1..n,1..n] and s[1..n-1,2..n]be new table
for i=1 to n
m[i,i]=0 // 对角线上元素初始化为0
for l =2 to n
for i =1 to n-l+1
j=i+l-1
m[i,j]=∞
for k=i to j-1
q=m[i,k]+m[k+1,j]+pi-1pkpj
if q <m[i,j]
m[i,j]=q
s[i,j]=k
4.构造最优解
时间复杂性:三层循环,每层最多n次 O(n^3)
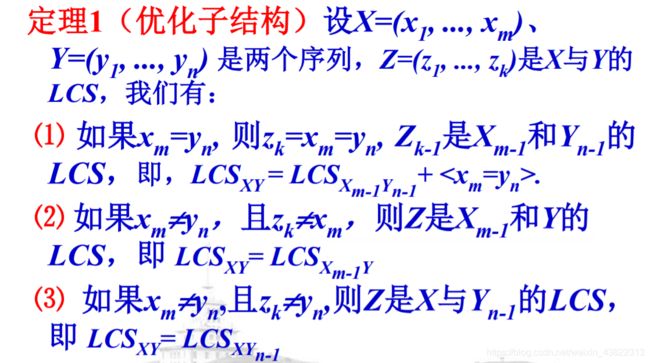
最长公共子序列问题—前缀动态规划
注意:只要求出现顺序相同,不要求连续出现
1.分析优化解结构
2.递归定义最优解
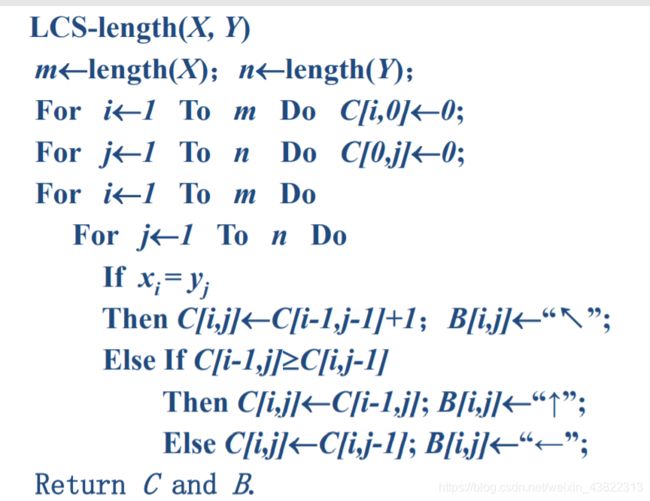
输入是两个串,为了刻画其特征,我们需要一个二维矩阵C[i,j]
根据优化子结构,写出其递归式

3.计算最优解即LCS的长度,自底向上

初始化i=0或j=0时,C[i,j]=0后,按行计算C[i,j]
为了刻画最优解,我们仍需一个矩阵B存储信息,存储指针表明每步的选择
递归的打印,因为首先出现的是LCS最后面的元素

时间复杂性 O(mn)
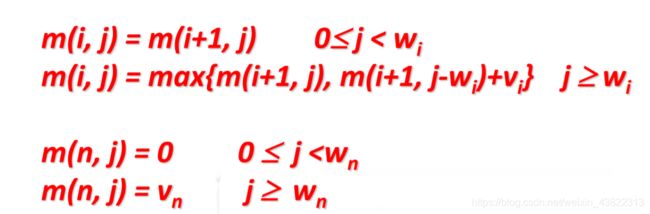
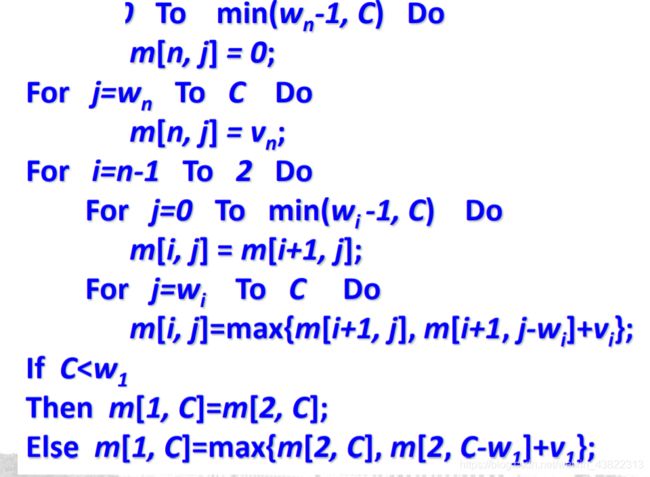
0-1背包
问题定义:给定n种物品和一个背包,物品i的重量是wi,价值vi,背包容量为C, 问如何选择装入背包的物品,使装入背包中的物品的总价值最大?
1.优化子结构
对一个物品,我们有选或者不选两个选择,所以从原问题,到原问题的子问题,我们进行的选择是第一个物品选或者不选,所以子问题就是选第一个物品,即容量被重新定义,不选第一个物品,容量无需更新,这两种情况下,收益较高的那种,即

2. 递归定义最优解
建立递归方程
3.自底向上计算最优解

ch5 贪心算法
设计步骤
1.将最优化问题转化为这样的形式:对其做出一次选择后,只剩下一个子问题要求解
2.证明做出贪心选择后,原问题总是存在最优解,即贪心选择总是安全的
3.证明做出贪心选择后,剩余的子问题满足性质:其最优解与贪心选择组合后即可得到原问题的最优解,这样就得到了最优子结构
贪心选择性
我们可以通过做出局部最优(贪心)选择来构造全局最优解。
与动态规划不同,贪心算法再做出第一次选择前不求解任何子问题,贪心算法通常是自顶向下的,进行一次又一次的选择从而使子问题的规模越来越小
最优子结构
一个问题的最优解包含子问题的最优解
在贪心算法中,只需证明:将子问题最优解与贪心选择组合在一起可以构成原问题的最优解
任务安排问题
贪心思想: 每次选择结束时间最早的活动
哈夫曼编码
贪心思想: 每次选择出现频率最低的两个字符作为左右儿子构造编码树
ch6 树搜索
基础–深度优先与广度优先
广度优先–利用队列先进先出、后进后出
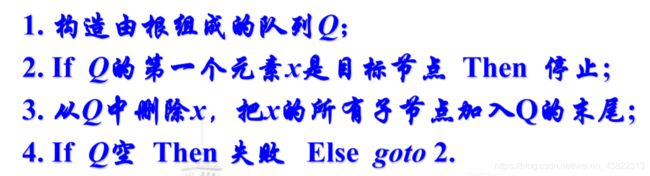
深度优先–利用栈后进先出
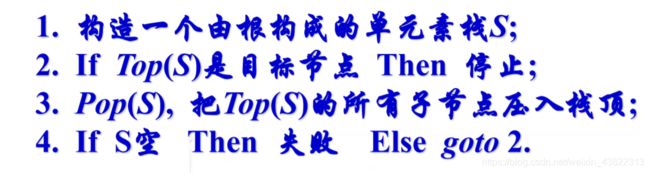
爬山法
深度优先搜索中,经常遇到多个节点可扩展,爬山法用启发式测度来排序节点扩展的顺序
即框架与深度有优先相同,显示根确定的单元素栈S,如果栈顶时目标节点停止,否则弹出栈顶S,S的子节点按照其启发式测度由大到小的顺序压入S
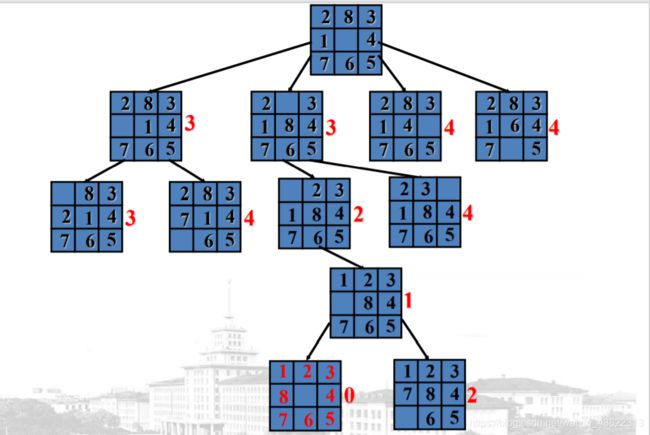
例:8-puzzle问题

用错误位置的方块数定义启发式函数
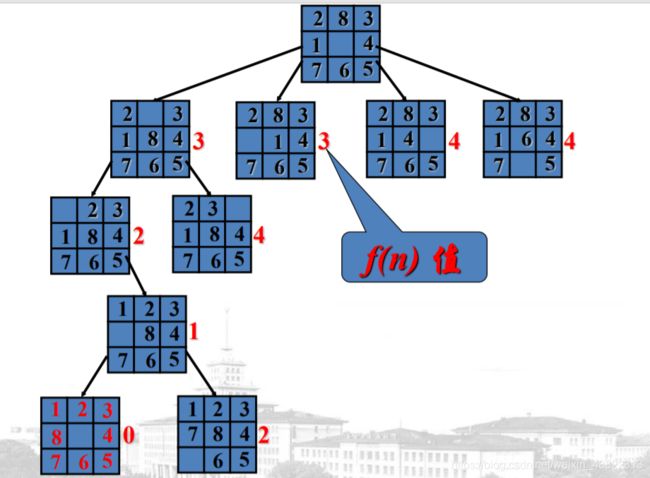
所以定义启发式测度函数是爬山法的关键,该函数决定了搜索的顺序,我们要找离我们想找的东西更近似的答案,以他作为新的起点进行搜索
Best-First
在目前产生的所有节点中,选择有最小评价函数值的节点进行扩展
具有全局优化观念,爬山法仅有局部优化的观念
每次选的不是当前路径的,而是所有节点中有最小评价函数值的节点
此处的评价函数与爬山法解决此问题时的启发式测度函数相同
分支界限
利用上述策略找到一个界限,利用此界限剪除不可能优化的分支,从而降低搜索的时间复杂度
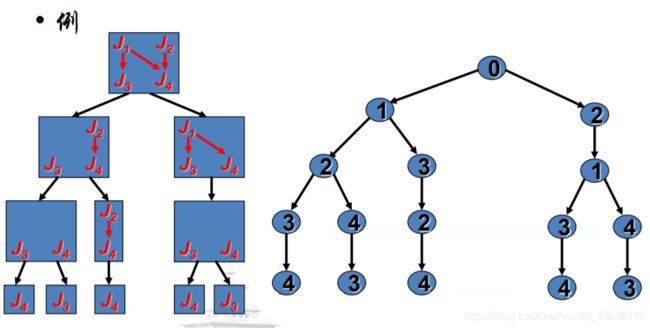
拓扑排序
依次选择没有父亲的节点,把它删掉
用分支界限解决问题的例子
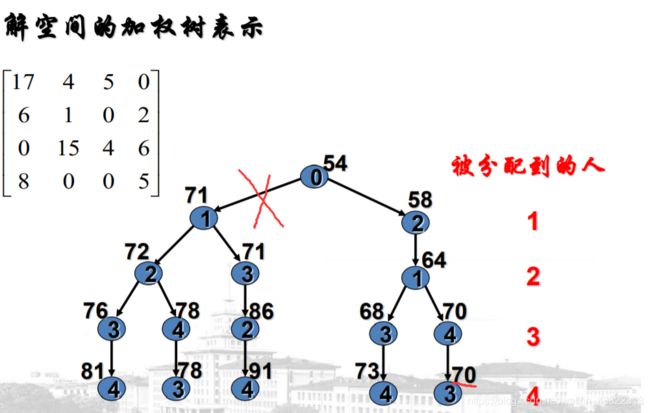
人员安排问题
输入

问题的解空间:所有可能的拓扑排序序列生成的二叉树
处理代价矩阵,得到更好的下界,从而更容易剪枝

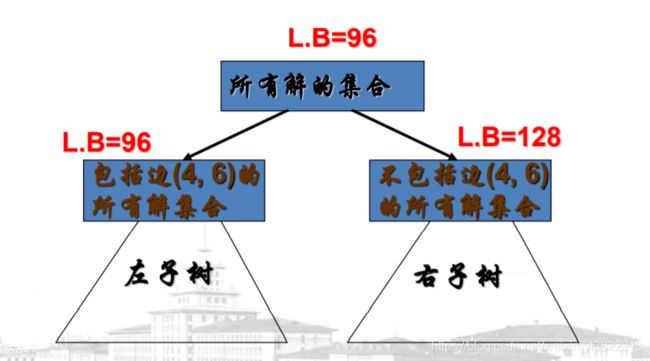
旅行商问题
问题描述:无向连通图,非负加权边,寻找一条从任意节点开始,经过每个节点一次,最后返回开始节点的路径,且路径的代价(加权和)最小。
利用边来划分,即某条边是否在我们所选的路径中,从而得到二叉树,从而每次剪枝可以剪掉1/2而不是1/n
剪枝策略为:不断发现优化解的上界a,从而一旦有子节点的代价下界超过a,则终止该结点的扩展
所以类似于上面的人员分配问题,我们首先处理代价矩阵

为了实现上述剪枝策略,我们选处理后为代价(即路径长)为0的变中,去掉此边后,从此边所在位置的行和列中各选一个最小值–即如果不选这个边ij则必有一个从i出去的边(在行中)也必有一个进入j的边(在列中)选取他们的和最小,即为下界
递归的构造左右子树
其中左子树包含的边所在行列去掉,ji设为∞
如果更改后存在行或列不含0,则减去最小得到0,并更新左子树下界
右子树ij设为无穷
如果更改后存在行或列不含0,则减去最小得到0,并更新右子树下界
递归的继续做,得到可行解后 剪枝
A*算法
分支界限算法的关键是界限,有了界限就可以剪枝,但是不知道什么时候获得最优解
A算法的核心是在某些情况下,我们得到的解一定是最优解因此算法可以停止
利用best-first搜索策略
关键–代价函数
对于任意节点n:g(n)=从树根到n的代价,h(n)=从n到目标结点的优化路径代价,f*(n)=g(n)+h*(n)是经过结点n到达目标结点的代价。
由于h*(n)是我们不知道的,我们只需要保证:
- 使用任何方法去估计h*(n), 用h(n)表示h*(n)的估计
- h(n)≤h*(n)总成立
- f(n)=g(n)+h(n)≤g(n)+h*(n)=f*(n)定义为n的代价
以最短路径问题为例

可以理解为保守的估计h*(n)从而保证一旦获得解即为最优解

使用best-first策略进行扩展
到结束时,所有可扩展点中T的代价时最小的,从而肯定为最优解
ch7 平摊分析
关注一系列操作上的时间复杂度
聚集方法
证明对所有n,一个n个操作的序列最坏情况下花费的总时间为T(n)
所以所有操作有相同的平摊代价T(n)/n
从更加广义的角度,取看待操作序列的某些性质:比如栈操作中,栈为空n个操作最多有n个元素入栈,比如二进制计数器+1操作中,n次操作,第n位最多变换n/(2的n次幂) 次
会计方法
一个操作序列中有很多不同的操作,不同类型的操作代价可能不同,我们为每个操作分配一个平摊代价,只要保证“存款”(每次操作积累的多余)总是>0,那么n次操作的平摊代价的和就是n次操作总的代价的上界
例如,在栈操作中,push的平摊代价设为2,pop的平摊代价设为0,multipop的平摊代价也设为0,因为栈中的元素个数总是>=0的,即栈中没有元素时不能进行pop和multipop操作,所以可以保证我们的“存款”总是>=0的
二进制计数器中,0->1设平摊代价为2,1->0设平摊代价为0,因此我们的“存款”即为计数器中1的个数,始终>=0 所以所有翻转操作的平摊代价和是这个操作序列代价的上界
势能方法
方法引入
在会计方法中,我们把余额与数据对象相连,在势能方法中我们把余额与整个数据结构关联,所有的余额的和构成势能
设计思想
首先保证势函数在D0处为0,其余情况势函数大于0 则总的平摊代价就是总的实际代价的一个上界
在较昂贵操作前,势能应该较大,经历昂贵操作后,势变到最小,在后面的操作中再逐渐提高势能
可以考虑在一系列操作中,是哪个操作花费时间较高,那这个操作引起的某个量的变化就可能作为势
例如在栈操作中,用栈中元素个数作为势能,保证了势能始终>=0
具体分析每个操作,每个操作的平摊代价=实际代价+势能差
动态表—3n
动态表用数组实现,每当数组装满时,重新分配一个大小为原数组两倍大的数组。
聚集分析
会计方法
势能方法
ch8 网络流–最大流和最小割
最大流问题
在不违反任何流量限制下,计算出从源点s运送物料到汇点t的最大速率
流网络
G=(V,E)是一个有向图,图中每个边(u,v)∈E,有一个容量c(u,v)≥0
如果存在边(u,v)则不存在其反向边(v,u)
每个结点都在从s到t的路径上
G中的流是一个实值函数 f:V×V->R 满足:
容量限制
对所有的结点u,v 都有0≤f(u,v)≤c(u,v)
流量守恒
流入=流出
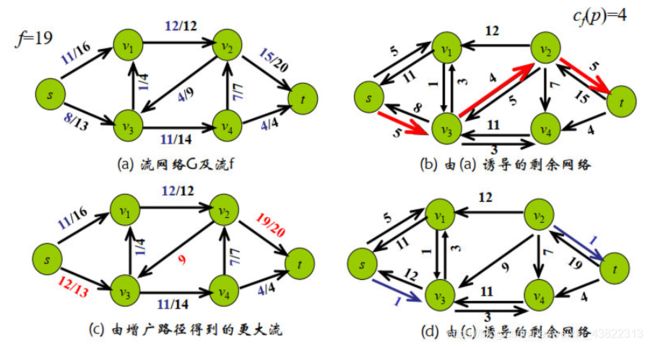
增广路径:从s到t的一条简单(不含环)路径
残余网络
残余网络(余图)中的一个流给我们指出的是一条路线图:如何在原
来的流网络中增加流
算法过程:
对随便选取的一条从s到t的路径创建余图,余图与原图点集相同,边的
大小取决于c(uv)边的容量和f(uv)当前此边的流量有关,正向边等于前者
减去后者(如果减完大于0)否则没有,反向边等于f(uv)
在此余图中继续寻找一条s到t的路径,按上述规则更新余图,直到找不
到s到t的一条路径算法结束
如果选择的不好可能找不到最大流
一个流是最大流当且仅当其残余网络(余图)不包含任何增广路径
时间复杂度
时间O(mC) C是最大流的值,所以C是最多的迭代次数 m是边数
流网络的切割
为了知道在算法终止时是否找到了最大流,引入网络流中的切割概念
最小割:网络流中容量最小的切割
切割:把结点分成S和T=V-S S包含s,T包含t,(S,T)的容量c(S,T)是
从u属于S到v属于T的所有边uv的容量之和
有定理 对给定流f,横跨任何切割的净流量都等于|f|
最大流最小割定理
1.f是G的一个最大流
2.残存网络(余图)不包含任何增广路径
3.|f|=c(S,T),其中(S,T)是流网络的某个切割
123等价
二分图匹配:使用最大流算法
加入一个源s和一个汇t
ch9 字符串匹配
Rabin-karp算法

分析

KMP算法
前缀函数

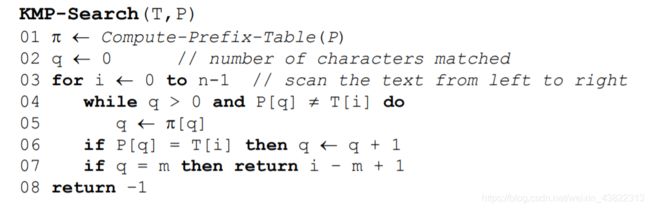
分析:
最差运行时间O(n+m)
计算前缀表:O(m)
主算法O(n)
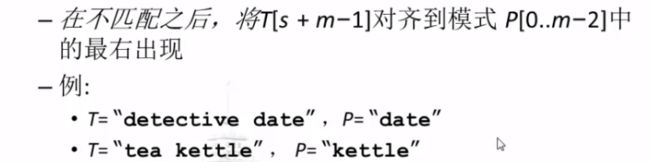
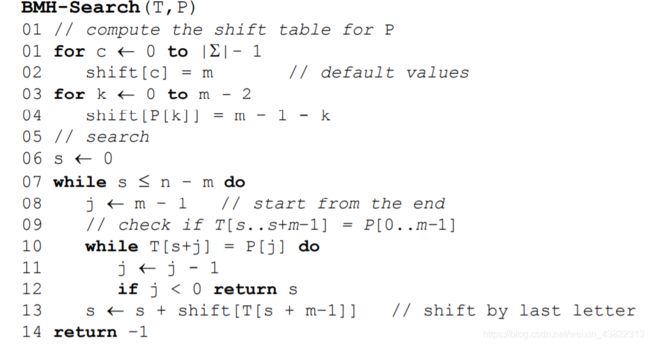
BMH算法
逆向匹配
思想:不匹配的概率总是更大的