OAK相机如何将yoloV5lite模型转换成blob格式?
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多⭐️✍
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是助手君。
最近咱社群里有几个朋友在将yolox转换成blob的过程有点不清楚,所以我就写了这篇博客。(请夸我贴心!咱的原则:合理要求,有求必应!)
1.其他Yolo转换及使用教程请参考
2.检测类的yolo模型建议使用在线转换(地址),如果在线转换不成功,你再根据本教程来做本地转换。
▌.pt 转换为 .onnx
使用下列脚本 (将脚本放到 YOLOv5 lite 根目录中) 将 pytorch 模型转换为 onnx 模型,若已安装 openvino_dev,则可进一步转换为 OpenVINO 模型:
示例用法:
python export_onnx.py -w <path_to_model>.pt -imgsz 320
export_onnx.py :
# coding=utf-8
import argparse
from io import BytesIO
import json
import logging
import sys
import time
import warnings
from pathlib import Path
warnings.filterwarnings("ignore")
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0]
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
import torch
import torch.nn as nn
from models.common import Conv
from models.experimental import attempt_load
from utils.activations import Hardswish, SiLU
from utils.general import check_img_size
from utils.torch_utils import select_device
try:
from rich import print
from rich.logging import RichHandler
logging.basicConfig(
level="INFO",
format="%(message)s",
datefmt="[%X]",
handlers=[
RichHandler(
rich_tracebacks=True,
show_path=False,
)
],
)
except ImportError:
logging.basicConfig(
level="INFO",
format="%(message)s",
datefmt="[%X]",
)
class DetectV5(nn.Module):
# YOLOv5 Detect head for detection models
dynamic = False # force grid reconstruction
export = True # export mode
def __init__(self, old_detect): # detection layer
super().__init__()
self.nc = old_detect.nc # number of classes
self.no = old_detect.no # number of outputs per anchor
self.nl = old_detect.nl # number of detection layers
self.na = old_detect.na
self.anchors = old_detect.anchors
self.grid = old_detect.grid # [torch.zeros(1)] * self.nl
self.anchor_grid = old_detect.anchor_grid # anchor grid
self.stride = old_detect.stride
if hasattr(old_detect, "inplace"):
self.inplace = old_detect.inplace
self.f = old_detect.f
self.i = old_detect.i
self.m = old_detect.m
def forward(self, x):
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
x[i] = x[i].sigmoid()
return x
def parse_args():
parser = argparse.ArgumentParser(
description="Tool for converting YOLOv5-Lite models to the blob format used by OAK",
formatter_class=argparse.ArgumentDefaultsHelpFormatter,
)
parser.add_argument(
"-m",
"-i",
"-w",
"--input_model",
type=Path,
required=True,
help="weights path",
)
parser.add_argument(
"-imgsz",
"--img-size",
nargs="+",
type=int,
default=[640, 640],
help="image size",
) # height, width
parser.add_argument("-op", "--opset", type=int, default=12, help="opset version")
parser.add_argument(
"-n",
"--name",
type=str,
help="The name of the model to be saved, none means using the same name as the input model",
)
parser.add_argument(
"-o",
"--output_dir",
type=Path,
help="Directory for saving files, none means using the same path as the input model",
)
parser.add_argument(
"-b",
"--blob",
action="store_true",
help="OAK Blob export",
)
parser.add_argument(
"-s",
"--spatial_detection",
action="store_true",
help="Inference with depth information",
)
parser.add_argument(
"-sh",
"--shaves",
type=int,
help="Inference with depth information",
)
parser.add_argument(
"-t",
"--convert_tool",
type=str,
help="Which tool is used to convert, docker: should already have docker (https://docs.docker.com/get-docker/) and docker-py (pip install docker) installed; blobconverter: uses an online server to convert the model and should already have blobconverter (pip install blobconverter); local: use openvino-dev (pip install openvino-dev) and openvino 2022.1 ( https://docs.oakchina.cn/en/latest /pages/Advanced/Neural_networks/local_convert_openvino.html#id2) to convert",
default="blobconverter",
choices=["docker", "blobconverter", "local"],
)
args = parser.parse_args()
args.input_model = args.input_model.resolve().absolute()
if args.name is None:
args.name = args.input_model.stem
if args.output_dir is None:
args.output_dir = args.input_model.parent
args.img_size *= 2 if len(args.img_size) == 1 else 1 # expand
if args.shaves is None:
args.shaves = 5 if args.spatial_detection else 6
return args
def export(input_model, img_size, output_model, opset, **kwargs):
t = time.time()
# Load PyTorch model
device = select_device("cpu")
model = attempt_load(input_model, map_location=device) # load FP32 model
labels = model.names
labels = labels if isinstance(labels, list) else list(labels.values())
# Checks
gs = int(max(model.stride)) # grid size (max stride)
img_size = [
check_img_size(x, gs) for x in img_size
] # verify img_size are gs-multiples
# Input
img = torch.zeros(1, 3, *img_size).to(device) # image size(1,3,320,320) iDetection
# Update model
model.eval()
for k, m in model.named_modules():
if isinstance(m, Conv): # assign export-friendly activations
m._non_persistent_buffers_set = set() # torch 1.6.0 compatibility
if isinstance(m.act, nn.SiLU):
m.act = SiLU()
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m, nn.Upsample):
m.recompute_scale_factor = None # torch 1.11.0 compatibility
model.model[-1] = DetectV5(model.model[-1])
m = model.module.model[-1] if hasattr(model, "module") else model.model[-1]
num_branches = len(m.anchor_grid)
y = model(img) # dry runs
# ONNX export
try:
import onnx
print()
logging.info("Starting ONNX export with onnx %s..." % onnx.__version__)
output_list = ["output%s_yolov5" % (i + 1) for i in range(num_branches)]
with BytesIO() as f:
torch.onnx.export(
model,
img,
f,
verbose=False,
opset_version=opset,
input_names=["images"],
output_names=output_list,
)
# Checks
onnx_model = onnx.load_from_string(f.getvalue()) # load onnx model
onnx.checker.check_model(onnx_model) # check onnx model
try:
import onnxsim
logging.info("Starting to simplify ONNX...")
onnx_model, check = onnxsim.simplify(onnx_model)
assert check, "assert check failed"
except ImportError:
logging.warning(
"onnxsim is not found, if you want to simplify the onnx, "
+ "you should install it:\n\t"
+ "pip install -U onnxsim onnxruntime\n"
+ "then use:\n\t"
+ f'python -m onnxsim "{output_model}" "{output_model}"'
)
except Exception:
logging.exception("Simplifier failure:")
onnx.save(onnx_model, output_model)
logging.info("ONNX export success, saved as:\n\t%s" % output_model)
except Exception:
logging.exception("ONNX export failure")
# generate anchors and sides
anchors, sides = [], []
m = model.module.model[-1] if hasattr(model, "module") else model.model[-1]
for i in range(num_branches):
sides.append(int(img_size[0] // m.stride[i]))
for j in range(m.anchor_grid[i].size()[1]):
anchors.extend(m.anchor_grid[i][0, j, 0, 0].numpy())
anchors = [float(x) for x in anchors]
# generate masks
masks = dict()
# for i, num in enumerate(sides[::-1]):
for i, num in enumerate(sides):
masks[f"side{num}"] = list(range(i * 3, i * 3 + 3))
logging.info("anchors:\n\t%s" % anchors)
logging.info("anchor_masks:\n\t%s" % masks)
export_json = output_model.with_suffix(".json")
export_json.write_text(
json.dumps(
{
"nn_config": {
"output_format": "detection",
"NN_family": "YOLO",
"input_size": f"{img_size[0]}x{img_size[1]}",
"NN_specific_metadata": {
"classes": model.nc,
"coordinates": 4,
"anchors": anchors,
"anchor_masks": masks,
"iou_threshold": 0.5,
"confidence_threshold": 0.5,
},
},
"mappings": {"labels": labels},
},
indent=4,
)
)
logging.info("Anchors data export success, saved as:\n\t%s" % export_json)
# Finish
logging.info("Export complete (%.2fs)." % (time.time() - t))
def convert(convert_tool, output_model, shaves, output_dir, name, **kwargs):
t = time.time()
export_dir: Path = output_dir.joinpath(name + "_openvino")
export_dir.mkdir(parents=True, exist_ok=True)
export_xml = export_dir.joinpath(name + ".xml")
export_blob = export_dir.joinpath(name + ".blob")
if convert_tool == "blobconverter":
import blobconverter
from zipfile import ZIP_LZMA, ZipFile
blob_path = blobconverter.from_onnx(
model=str(output_model),
data_type="FP16",
shaves=shaves,
use_cache=False,
version="2022.1",
output_dir=export_dir,
optimizer_params=[
"--scale=255",
"--reverse_input_channel",
"--use_new_frontend",
],
download_ir=True,
)
with ZipFile(blob_path, "r", ZIP_LZMA) as zip_obj:
for name in zip_obj.namelist():
zip_obj.extract(
name,
output_dir,
)
blob_path.unlink()
elif convert_tool == "docker":
import docker
export_dir = Path("/io").joinpath(export_dir.name)
export_xml = export_dir.joinpath(name + ".xml")
export_blob = export_dir.joinpath(name + ".blob")
client = docker.from_env()
image = client.images.pull("openvino/ubuntu20_dev", tag="2022.1.0")
docker_output = client.containers.run(
image=image.tags[0],
command=f"bash -c \"mo -m {name}.onnx -n {name} -o {export_dir} --static_shape --reverse_input_channels --scale=255 --use_new_frontend && echo 'MYRIAD_ENABLE_MX_BOOT NO' | tee /tmp/myriad.conf >> /dev/null && /opt/intel/openvino/tools/compile_tool/compile_tool -m {export_xml} -o {export_blob} -ip U8 -VPU_NUMBER_OF_SHAVES {shaves} -VPU_NUMBER_OF_CMX_SLICES {shaves} -d MYRIAD -c /tmp/myriad.conf\"",
remove=True,
volumes=[
f"{output_dir}:/io",
],
working_dir="/io",
)
logging.info(docker_output.decode("utf8"))
else:
import subprocess as sp
# OpenVINO export
logging.info("Starting to export OpenVINO...")
OpenVINO_cmd = (
"mo --input_model %s --output_dir %s --data_type FP16 --scale 255 --reverse_input_channel"
% (output_model, export_dir)
)
try:
sp.check_output(OpenVINO_cmd, shell=True)
logging.info("OpenVINO export success, saved as %s" % export_dir)
except Exception:
logging.exception("")
logging.warning("OpenVINO export failure!")
logging.warning(
"By the way, you can try to export OpenVINO use:\n\t%s" % OpenVINO_cmd
)
# OAK Blob export
logging.info("Then you can try to export blob use:")
blob_cmd = (
"echo 'MYRIAD_ENABLE_MX_BOOT ON' | tee /tmp/myriad.conf"
+ "compile_tool -m %s -o %s -ip U8 -d MYRIAD -VPU_NUMBER_OF_SHAVES %s -VPU_NUMBER_OF_CMX_SLICES %s -c /tmp/myriad.conf"
% (export_xml, export_blob, shaves, shaves)
)
logging.info("%s" % blob_cmd)
logging.info(
"compile_tool maybe in the path: /opt/intel/openvino/tools/compile_tool/compile_tool, if you install openvino 2022.1 with apt"
)
logging.info("Convert complete (%.2fs).\n" % (time.time() - t))
if __name__ == "__main__":
args = parse_args()
print(args)
output_model = args.output_dir / (args.name + ".onnx")
export(output_model=output_model, **vars(args))
if args.blob:
convert(output_model=output_model, **vars(args))
可以使用 Netron 查看模型结构

▌转换
openvino 本地转换
onnx -> openvino
mo 是 openvino_dev 2022.1 中脚本,
安装命令为
pip install openvino-dev
mo --input_model v5lite.onnx --scale 255 --reverse_input_channel
openvino -> blob
<path>/compile_tool -m v5lite.xml \
-ip U8 -d MYRIAD \
-VPU_NUMBER_OF_SHAVES 6 \
-VPU_NUMBER_OF_CMX_SLICES 6
在线转换
blobconvert 网页 http://blobconverter.luxonis.com/
- 进入网页,按下图指示操作:

- 修改参数,转换模型:

1. 选择 onnx 模型
2. 修改 optimizer_params 为 --data_type=FP16 --scale 255 --reverse_input_channel
3. 修改 shaves 为 6
4. 转换
blobconverter python 代码
blobconverter.from_onnx(
"v5lite.onnx",
optimizer_params=[
" --scale 255",
"--reverse_input_channel",
],
shaves=6,
)
blobconvert cli
blobconverter --onnx v5lite.onnx -sh 6 -o . --optimizer-params "scale=255 --reverse_input_channel"
▌DepthAI 示例
正确解码需要可配置的网络相关参数:
使用 export_onnx.py 转换模型时会将相关参数写入 json 文件中,可根据 json 文件中数据添加下列参数
-
setNumClasses - YOLO 检测类别的数量
-
setIouThreshold - iou 阈值
-
setConfidenceThreshold - 置信度阈值,低于该阈值的对象将被过滤掉
-
setAnchors - yolo 锚点
-
setAnchorMasks - 锚掩码
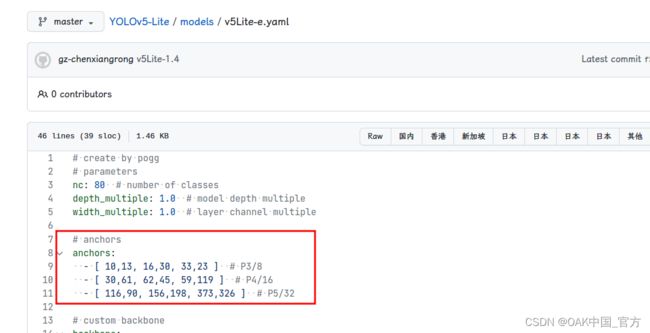
Anchors:
训练模型时 cfg 中的 anchors,例如:
[10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326]是从 v5Lite-e.yaml 中 获取
AnchorMasks :
如果使用不同的输入宽度,还应该重新设置
sideX,sideY,sideZ, 其中X = width/8,Y = width/16,Z = width/32。如果您使用的是微型(tiny)模型,那么只要设置sideX,sideY,其中X = width/16,Y = width/32。
# coding=utf-8
import cv2
import depthai as dai
import numpy as np
numClasses = 80
model = dai.OpenVINO.Blob("v5lite.blob")
dim = next(iter(model.networkInputs.values())).dims
W, H = dim[:2]
output_name, output_tenser = next(iter(model.networkOutputs.items()))
if "yolov6" in output_name:
numClasses = output_tenser.dims[2] - 5
else:
numClasses = output_tenser.dims[2] // 3 - 5
labelMap = [
# "class_1","class_2","..."
"class_%s" % i
for i in range(numClasses)
]
# Create pipeline
pipeline = dai.Pipeline()
# Define sources and outputs
camRgb = pipeline.create(dai.node.ColorCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
xoutRgb = pipeline.create(dai.node.XLinkOut)
xoutNN = pipeline.create(dai.node.XLinkOut)
xoutRgb.setStreamName("image")
xoutNN.setStreamName("nn")
# Properties
camRgb.setPreviewSize(W, H)
camRgb.setResolution(dai.ColorCameraProperties.SensorResolution.THE_1080_P)
camRgb.setInterleaved(False)
camRgb.setColorOrder(dai.ColorCameraProperties.ColorOrder.BGR)
# Network specific settings
detectionNetwork.setBlob(model)
detectionNetwork.setConfidenceThreshold(0.5)
# Yolo specific parameters
detectionNetwork.setNumClasses(numClasses)
detectionNetwork.setCoordinateSize(4)
detectionNetwork.setAnchors(
[
10,13, 16,30, 33,23,
30,61, 62,45, 59,119,
116,90, 156,198, 373,326
]
)
detectionNetwork.setAnchorMasks(
{
"side%s" % (W // 8): [0, 1, 2],
"side%s" % (W // 16): [3, 4, 5],
"side%s" % (W // 32): [6, 7, 8],
}
)
detectionNetwork.setIouThreshold(0.5)
# Linking
camRgb.preview.link(detectionNetwork.input)
camRgb.preview.link(xoutRgb.input)
detectionNetwork.out.link(xoutNN.input)
# Connect to device and start pipeline
with dai.Device(pipeline) as device:
# Output queues will be used to get the rgb frames and nn data from the outputs defined above
imageQueue = device.getOutputQueue(name="image", maxSize=4, blocking=False)
detectQueue = device.getOutputQueue(name="nn", maxSize=4, blocking=False)
frame = None
detections = []
# nn data, being the bounding box locations, are in <0..1> range - they need to be normalized with frame width/height
def frameNorm(frame, bbox):
normVals = np.full(len(bbox), frame.shape[0])
normVals[::2] = frame.shape[1]
return (np.clip(np.array(bbox), 0, 1) * normVals).astype(int)
def drawText(frame, text, org, color=(255, 255, 255), thickness=1):
cv2.putText(
frame, text, org, cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), thickness + 3, cv2.LINE_AA
)
cv2.putText(
frame, text, org, cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, thickness, cv2.LINE_AA
)
def drawRect(frame, topLeft, bottomRight, color=(255, 255, 255), thickness=1):
cv2.rectangle(frame, topLeft, bottomRight, (0, 0, 0), thickness + 3)
cv2.rectangle(frame, topLeft, bottomRight, color, thickness)
def displayFrame(name, frame):
color = (128, 128, 128)
for detection in detections:
bbox = frameNorm(
frame, (detection.xmin, detection.ymin, detection.xmax, detection.ymax)
)
drawText(
frame=frame,
text=labelMap[detection.label],
org=(bbox[0] + 10, bbox[1] + 20),
)
drawText(
frame=frame,
text=f"{detection.confidence:.2%}",
org=(bbox[0] + 10, bbox[1] + 35),
)
drawRect(
frame=frame,
topLeft=(bbox[0], bbox[1]),
bottomRight=(bbox[2], bbox[3]),
color=color,
)
# Show the frame
cv2.imshow(name, frame)
while True:
imageQueueData = imageQueue.tryGet()
detectQueueData = detectQueue.tryGet()
if imageQueueData is not None:
frame = imageQueueData.getCvFrame()
if detectQueueData is not None:
detections = detectQueueData.detections
if frame is not None:
displayFrame("rgb", frame)
if cv2.waitKey(1) == ord("q"):
break
▌参考资料
https://docs.oakchina.cn/en/latest/
https://www.oakchina.cn/selection-guide/
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗