地铁自动驾驶模型,地铁列车牵引系统整车模型。
完整的列车模型包括目标曲线的优化,控制层进行跟随目标曲线,经神经网络控制和模糊控制给出推荐牵引力,牵引传动系统控制牵引电机输出牵引转矩,输入列车自动驾驶模型进行牵引计算。其中生成优化曲线通过遗传算法进行离线设计,将优化的v-s曲线输入给列车控制器储存,并根据推荐曲线进行神经网络控制器的训练。
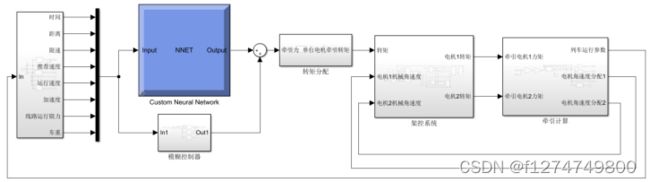
图6.1 整车模型
Figure 6.1 The whole vehicle model
地铁列车的整车模型主要包括,列车与线路数据输入部分,神经网络和模糊控制组成的智能控制器,列车的转矩分配,列车的架空系统以及整车的牵引计算。列车的架控模型由第五章给出,列车的牵引计算如下图所示。

图6.2 整车牵引计算
Figure 6.2 Towing calculation of the whole vehicle
在整车牵引计算模型中,车速的求解是一个复杂的过程,本文主要是验证自动驾驶系统的性能,在考虑车速时,只考虑了列车的纵向力进行牵引计算,求出列车加速度进行积分得到列车运行速度,将一个架控系统的电机的输出合力矩作为输入,考虑到本文所用列车有4个动车共8个转向架,进行理想化处理,假设每个转向架输出力相同,将这些合力作为牵引计算的牵引力与制动力。
根据牵引计算求出车速,分配两台电机的转速,两台牵引电机的齿轮传动比是相同的为6.688,本文为观测架控系统中两台电机不同转速的影响,设置不同的车轮半径,使得电机的机械角速度不同。返回给列车的架控系统。

图6.3 转矩求解
Figure 6.3 Torque solution
列车的架控系统的给定转矩是通过智能控制给出的牵引力计算的,为了简化计算过程,本文并未考虑列车轴重转移以及空转保护的影响,将输入牵引力平均分给16台电机。为了保证列车的舒适性,加入牵引力斜率控制模块,保证列车牵引力不超过列车最大牵引曲线和制动曲线,同时牵引力给定不会突变,最大变化率为列车质量的0.75倍。
6.2 列车最大运行能力运行安全性分析
列车运行的安全性是指列车在区间内运行,列车的实际运行速度是否超速,以及控制系统的跟随特性。为了验证本文控制策略的合理性,采用列车的最大运行能力曲线进行仿真测试,架控系统中轮径差为6mm,观测列车采用最大运行能力曲线运行时,列车控制器的跟踪效果,以及架控系统的安全性、能耗等情况。列车的最大运行能力速度-位移曲线如图6.4所示。

图6.4 列车运行推荐速度随距离变化
Figure 6.4 The recommended train speed varies with distance
根据最大运行能力曲线,进行整车仿真,列车的v-s跟踪曲线如图6.5所示。
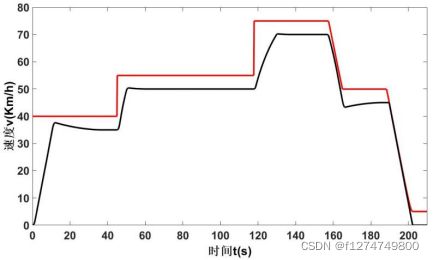
图6.5 列车实际运行曲线图
Figure 6.5 Actual train operation curve

图6.6速度跟踪误差曲线图
Figure 6.6 Speed tracking error curve
列车在运行区间内,能够跟随最大运行能力曲线,基本吻合,在运行过程中最大运行速度没有超过ATP制动曲线。列车的运行曲线也没有出现较大的波动。由图6.6速度误差曲线可以看出,列车运行速度在小范围内波动,在列车坡道变化时会出现一些小尖峰,智能控制器能够快速修正,在停车制动时,速度实现精确跟踪,使列车能够实现精准停车。
列车架控系统输出力矩分析
要实现列车自动驾驶目标,列车要能跟随ATO输出牵引力,同时列车以最大运行能力运行,是否满足架控系统的额定工作条件。
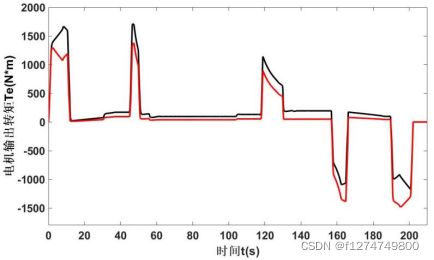
图6.7两电机输出力矩
Figure 6.7 Output torque of two motors
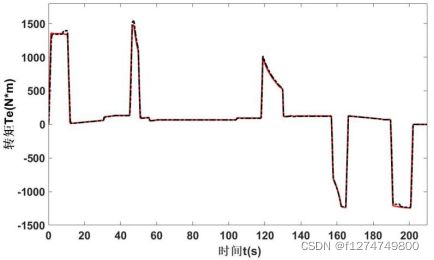
图6.8 架控系统输出转矩跟踪曲线
Figure 6.8 Output torque tracking curve of the rack control system
图6.8中红线为给定力矩,黑色点画线为架控系统输出力矩。从图6.7中可以看出,在架控系统中当存在两个电机转速不一致时,会出现转矩偏差,在列车按最大运行能力曲线运行时,力矩偏差更为严重,主要体现在牵引工况和制动工况,高转速电机输出力矩与给定力矩偏差最大为23%,低转速电机输出力矩与给定力矩偏差最大为21.5%,由图6.8可知,电机的合力矩与给定力矩会出现偏差,不能理想的跟踪列车的给定转矩。
列车架控系统电流分析

图6.9两电机输出电流有效值
Figure 6.9 The effective value of the output current of the two motors
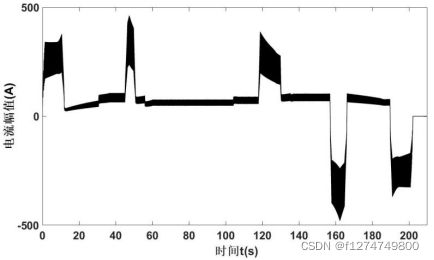
图6.10中间直流环节电流
Figure 6.10 Intermediate DC link current
由图6.9可知,电机输出电流变化,黑线为低转速,红线为高转速,在制动阶段高转速电流更大。在牵引阶段,低转速电流更大,电机的额定电流为132A,在牵引和制动阶段存在工作电流超出额定电流的过载工作,由转速差带来的过载情况更为严重。
牵引逆变器的设计容量主要考核中间直流环节的峰值电流,由图6.11可知,在列车的最大运行能力运行过程中牵引过程的峰值电流为456A,制动阶段的最大峰值电流为462A,在牵引逆变器选型设计时应更多的考核制动阶段峰值电流。
列车的运行能耗分析
本章所计算的能量消耗是列车牵引与制动阶段,电机的输出消耗。

图6.11两电机输出功率
Figure 6.11 Output power of two motors
从图6.11中可以看出,架控系统的两台牵引电机,输出功率存在偏差,牵引阶段低转速输出功率更高,制动阶段高转速功率更高。电机的额定功率为190Kw,列车按最大运行能力运行时会有过载情况的发生。
地铁牵引系统根据TCU给定的牵引转矩进行调节,由牵引逆变器和牵引控制系统实现对牵引电机的调节,在中间直流环节网压为1500V的地铁牵引系统,根据牵引特性曲线对电机进行控制。
5.6.1架控系统电机牵引特性曲线
在架控系统中两台牵引电机转速相同时,按列车最大牵引特性曲线运行。根据异步电机参数表,进行标幺值计算,以电机的额定值为基准值,电机的牵引特性曲线如图5.10所示。

图5.10 电机牵引特性曲线
Figure 5.10 Motor traction characteristic curve
在牵引系统中,列车启动阶段需要比较大的启动牵引力,电机工作在恒转矩区间,随着电机的转速增加,当电机转速达到1453 r/min时,电机进入恒功率区域,随着电机转速增加电机输出力矩开始下降,当电机转速增加到2076 r/min时,电机进入自然特性区,直到电机达到最高转速。
在启动阶段,定子电流保持恒定,电机电压以V/F比线性增加,当电机转速达到924 r/min时,电机电压达到额定值,电机电压开始保持恒定,定子电流开始过载运行,进入恒功率区域定子电流达到最大,并保持稳定,在自然特性区开始下降。转差频率在启动阶段保持恒定,在电压恒定时,在电压极限椭圆限制下,增大转差频率调整电机输出力矩。
5.6.2矢量控制仿真实验
牵引电机采用矢量控制策略,应用最大转矩电流比控制,通过观察电机输出电流分析电机的控制效果。矢量控制下牵引电机输出电流如下。

图5.11 速度变化时牵引电机输出交直轴电流
Figure 5.11 Traction motor output AC-DC axis current when the speed changes
随着电机转速升高,在启动阶段应用最大转矩电流比控制电机的励磁电流与转矩电流相同,当电机电压达到额定值之后,受电压极限椭圆的影响,电机的励磁电流开始下降,转矩电流开始升高维持输出力矩不变,进入恒功率阶段,转矩电流保持不变,维持有功功率不变,励磁电流在极限椭圆的影响下极限下降,进入自然特性区转矩电流开始下降。
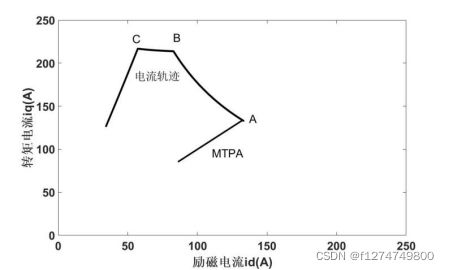
图5.12 电机电流运行轨迹
Figure 5.12 Motor current running track
根据电机的电流轨迹运行图,电机的启动阶段,稳态工作点为MTPA曲线上的A点,通过求力矩曲线与电压极限椭圆的交点电机的稳态工作点由A点移动到B点,在恒功率阶段由B点移动到C点,进入自然特性区,随着力矩的减小,稳态工作点开始向原点减小。验证了电压极限椭圆限制下的MTPA控制的有效性,在满足电机输出力矩的要求时,相电流幅值最小。
模型参考
地铁自动驾驶模型,地铁列车牵引系统整车模型。_列车牵引系统-专业指导文档类资源-CSDN下载