数据结构与算法--基础篇
目录
概念
常见的数据结构
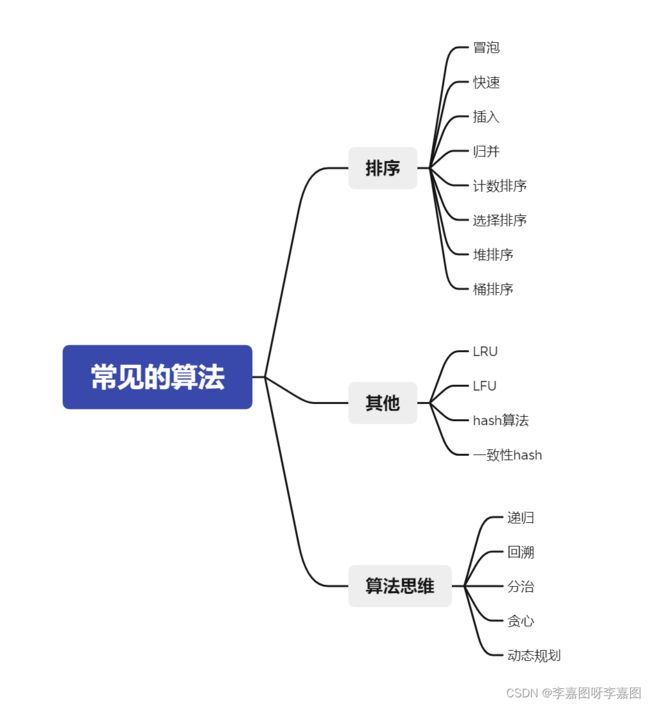
常见的算法
算法复杂度
空间复杂度
时间复杂度
数据结构与算法基础
线性表
数组
链表
栈
队列
散列表
递归
二分查找
概念
常见的数据结构

常见的算法
算法复杂度
空间复杂度
空间复杂度表示算法的存储空间与数据规模之间的增长关系,比如将一个数组拷贝到另一个数组中,就是相当于空间扩大了一倍:T(n)=O(2n),忽略系数即为O(n),由于现在硬件相对比较便宜,所以在开发中常会利用空间来换时间,比如 缓存技术 典型的数据结构中空间换时间是:Redis的跳跃表,实际开发中我们更关注代码的时间复杂度,而用于执行效率的提升。
时间复杂度
时间复杂度表示代码执行时间与数据规模间的增长关系,因此时间复杂度也称为渐进时间复杂度。
假设执行一行代码的时间为t,通过估算,代码的执行时间T(n)与执行次数成正比,记作:
T(n)=O(f(n))
T(n) : 代码执行时间n : 数据规模f(n) : 每行代码执行次数总和O : 代码的执行时间与 f(n) 表达式成正比如 T(n)=O(2n+2) ,当n 无限大时,低阶、常量、系统都可以忽略,所以T(n)=O(n)
计算时间复杂度的技巧
- 计算循环执行次数最多的代码
- 总复杂度=量级最大的复杂度
常见的时间复杂度
- O(1) 常量级,代码执行时间不会随着数据规模增加而增加,实际应用中,通常使用冗余字段存储来将O(n)变成O(1),比如Redis中有很多这样的操作用来提升访问性能,比如:SDS、字典、跳跃表等。
- O(logn)、O(nlogn) 快速排序、归并排序的时间复杂度都是O(nlogn)
- O(n) 很多线性表都是O(n), 比如数组的插入删除,链表的遍历 HashMap理论上是O(1),但实际上是O(n)
- O(n^2) 冒泡排序
数据结构与算法基础
线性表
数组
原理:在内存中开辟连续的内存空间存储相同类型的数据,物理上的连续的数据结构。
时间复杂度:读取和更新都是随机访问,复杂度 O(1)
插入和删除涉及到数据移动,复杂度 O(n)
优缺点:随机访问效率高,但需要连续的空间,没有连续内存空间可能创建失败。
应用:数组是基础的数据结构,应用太广泛了,ArrayList、Redis、消息队列等等。
数组访问为何下标从0开始? 为何需要相同的类型?为何需要连续性分配?
假设首地址是:1000, int 是4字节(32位)
在进行随机元素寻址的时候: a[i]_address = a[0]_address + i * 4
因此相同的类型,连续性分配才能计算出位置,而从0开始相比与从1开始少了一步计算,效率更高。

链表
原理:在物理上非连续、非顺序的数据结构,由若干节点(node)所组成,通过指针将各个节点关联起来,有效的利用零散的碎片空间。
时间复杂度:插入,更新,删除都是 O(1),查找是 O(n)。
优缺点:省空间,插入效率高,但是查询效率低,不能随机访问。
应用:链表的应用也非常广泛,比如树、图、Redis的列表、LRU算法实现、消息队列等。
栈
原理:栈属于线性结构的逻辑存储结构,栈中的元素只能先入后出,可以通过数组实现也可通过链表实现。
时间复杂度:入栈、出栈复杂度都是O(1),扩容需要将元素拷贝到新的空间中,复杂度是 O(n)。
应用:函数调用记录,浏览器的前进后退功能。
队列
原理:栈属于线性结构的逻辑存储结构,栈中的元素只能先进后出,可以通过数组实现也可通过链表实现。
时间复杂度:入队、出队复杂度都是O(1)。
应用:资源池、消息队列、命令队列等等。
散列表
概念:散列表也叫哈希表(hash table),通过键(Key)和值(Value)的映射关系进行存储,根据Key,可以高效查找到它所匹配的Value,时间复杂度接近于O(1)。
存储原理:本质上也是一个数组,Key以字符串类型为主,通过hash函数将Key和数组下标进行转换,作用是将任意长度的输入通过散列算法转换成固定长度的的散列值。
//数组下标=取key的hashcode模数组的长度后的余数
index = HashCode (Key) % Array.length插入数据时:
1.通过哈希函数,把Key转化成数组下标
2.如果数组下标对应的位置没有元素,就把这个Entry填充到数组下标的位置
3.插入的Entry越来越多时,不同的Key可能会禅师Hash冲突,冲突后可以通过 开放寻址法 或 链表法 解决冲突。
开放寻址法:当一个Key通过哈希函数获得对应数组下标被占用时寻找下一个空档位置
链表法:数组的每个元素不仅是个Entry对象,还是个链表的头节点。每个Entry对象通过next指针指向它的下个Entry节点。当新来的Entry映射到与之冲突的数组位置时,只需要插入到对应的链表中即可,默认next指向null
读取数据时:
1.通过哈希函数,把Key转化成数组下标
2.找到数组下标所对应的元素,如果key不正确则产生了hash冲突,顺着头节点遍历该单链表,再根据key即可取值
Hash扩容:
影响扩容的两个因素:
Capacity:HashMap的当前长度
LoadFactor:HashMap的负载因子(阈值),默认值为0.75f当HashMap.Size >= Capacity×LoadFactor时,需要进行扩容
1. 创建一个新的Entry空数组,长度是原数组的2倍
2.重新Hash,遍历原Entry数组,把所有的Entry重新Hash到新数组中
JDK1.8前在HashMap扩容时,会反序单链表,这样在高并发时会有死循环的可能。
关于HashMap的实现,JDK 8和以前的版本有着很大不同。当多个Entry被Hash到同一个数组下标位置时,为了提升插入和查找的效率,HashMap会把Entry的链表转化为红黑树这种数据结构。
当链表长度为8,链表会转为红黑树;当链表长度为6,红黑树转换为链表;
红黑树的平均查找长度是log(n),长度为8,查找长度为log(8)=3
链表的平均查找长度为n/2,当长度为8时,平均查找长度为8/2=4
链表长度如果是小于等于6,6/2=3,虽然速度也很快的,但是转化为树结构和生成树的时间并不会太短。
还有选择6和8的原因是:
中间差值7防止链表和树之间频繁的转换。假设一下,如果设计成链表个数超过8则链表转换成树结构,链表个数小于8则树结构转换成链表,如果一个HashMap不停的插入、删除元素,链表个数在8左右徘徊,就会频繁的发生树转链表、链表转树,效率会很低。
时间复杂度:
写操作:O(1) + O(n) = O(n) n 为单链元素个数
读操作:O(1) + O(n) n 为单链元素个数
Hash冲突写单链表:O(n)
Hash扩容:O(n) n是数组元素个数 rehash
Hash冲突读单链表:O(n) n为单链元素个数
优缺点:读写快,但是Hash表中元素没有被排序、Hash冲突、扩容需要重新计算hash
应用:HashMap,Redis字典,布隆过滤器,位图
递归
概念:直接或者间接调用自身函数或者方法,本质上是一种循环
递归三要素:递归结束条件(有结束,无OOM)
递归函数功能(函数要做什么)
函数等价关系式(递归公式,一般是每次执行之间,或与个数之间逻辑关系)
例如:
//循环实现 public static void print(String ss) { for(int i=1;i<=5;i++){ System.out.println(ss); } } //递归实现 public static void print(String ss, int n) { //递归条件 if(n>0){ //函数的功能 System.out.println(ss); //函数的等价关系式 print(ss,n-1); } } public static void main(String[] args) { //调用循环 print("Hello World"); System.out.println("======================"); //调用递归 print("Hello World", 5); }递归要素:递归结束条件:n<=0函数的功能:System.out.println(ss);函数的等价关系式:fun(n)=fun(n-1)
经典案例:斐波那契数列:0、1、1、2、3、5、8、13、21、34、55
//递归实现
public static int fun2(int n) {
if (n <= 1)
return n;
return fun2(n - 1) + fun2(n - 2);
}
public static void main(String[] args) {
fun1(9);
System.out.println("==================================");
System.out.println(fun2(9));
}时间复杂度:斐波那契数列普通递归解法为O(2^n)
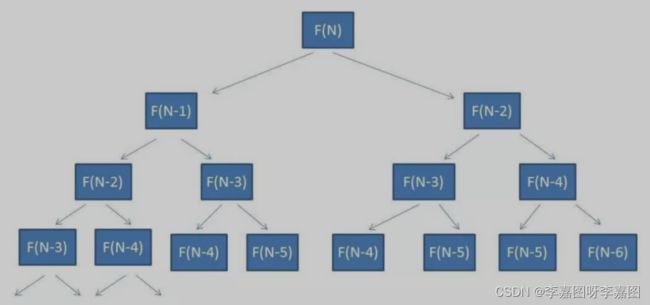
优缺点:代码简单,但是占用空间大,递归太深可能发生栈溢出,可能会有重复计算,可以通过备忘录或递归的方式去优化(动态规划)。
应用:递归作为基础算法,应用非常广泛,比如在二分查找、快速排序、归并排序、树的遍历上都有使用递归 回溯算法、分治算法、动态规划中也大量使用递归算法实现。
二分查找
概念:二分查找(Binary Search)算法,也叫折半查找算法 。当数组是一个有序序列时使用二分查找效率很高,但是如果是无序的话,无法使用二分查找法
时间复杂度:O(logn)
优缺点:速度快,不占空间,不开辟新空间,但必须是有序的数组,数据量太小没有意义,但数据量也不能太大,因为数组要占用连续的空间
应用:有序的查找都可以使用二分法。