计算机视觉算法——基于Transformer的目标检测(Efficient DETR / Anchor DETR / Conditional DETR / DAB DETR)
计算机视觉算法——基于Transformer的目标检测(Efficient DETR / Anchor DETR / Conditional DETR / DAB DETR)
- 计算机视觉算法——基于Transformer的目标检测(Efficient DETR / Anchor DETR / Conditional DETR / DAB DETR)
-
- 1. Efficient DETR
-
- 1.1 Impact of Initialization of Object Queries
- 1.2 Dense and Sparse Part
- 2. Anchor DETR
-
- 2.1 Anchor Points to Object Query
- 2.2 Row-Column Decoupled Attention
- 3. Conditional DETR
-
- 3.1 Attention Maps
- 3.2 DETR Decoder Cross-Attention
- 3.3 Conditional Spatial Query Prediction
- 4. DAB DETR
-
- 4.1 Analysis on Positional Prior
- 4.2 Learning and Update Anchor Box
计算机视觉算法——基于Transformer的目标检测(Efficient DETR / Anchor DETR / Conditional DETR / DAB DETR)
自DETR年提出来之后,许多Paper针对DETR中收敛速度慢、检测效果差等问题进行了针对性优化,在
计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / Dynamic DETR / DETR 3D)中我们对DETR以及其部分优化方法进行了总结,本篇博客我们针对这些优化方法进行进一步补充。
1. Efficient DETR
Efficient DETR发表于2021年CVPR,该论文主要研究思路是期望Query能够被更好地初始化进而网络可以被加速收敛。文章主体的思路是循序渐进、由浅入深的,下面我们按照文章原本的思路来介绍该方法。
1.1 Impact of Initialization of Object Queries
首先文章提到,在DETR的中有,会发现Decoder的层数会比Encoder的层数更加重要,如下图所示:
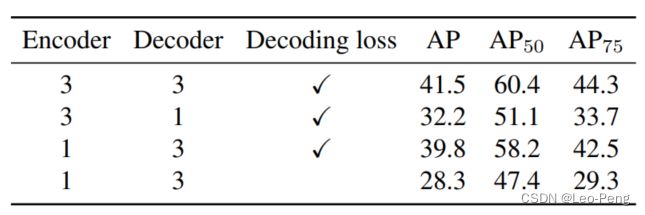
将Encoder层数从3层减到1层,AP仅掉了1.7个点,但是将Decoder从3层见到1层,AP掉了将近10个点。那么为什么DETR的结果会对Decoder层数这么敏感呢?文章指出,最终检测结果是从Object Query中获得的,而Object Query是被随机初始化并在Decoder的每一层迭代中逐渐被更新,因此当Decoder层数减少时,Object Query收敛不充分,网络性能也会随之下降。
除此之外,作者还发现在DETR中的Object Query通过学习后会专注于图像中的某一个特殊区域,因此研究Object Query到图像空间的映射能够帮助我们去理解Object Query是如何在Decoder的一层层迭代中逐步收敛的。在Deformable DETR中,Decoder部分正好做了这么一件事情,Defomable DETR的Decoder会从Query中通过一个MLP生成Reference Point。因此作者可视化了Deformable DETR中的Reference Point收敛前和收敛后的变化情况如下:
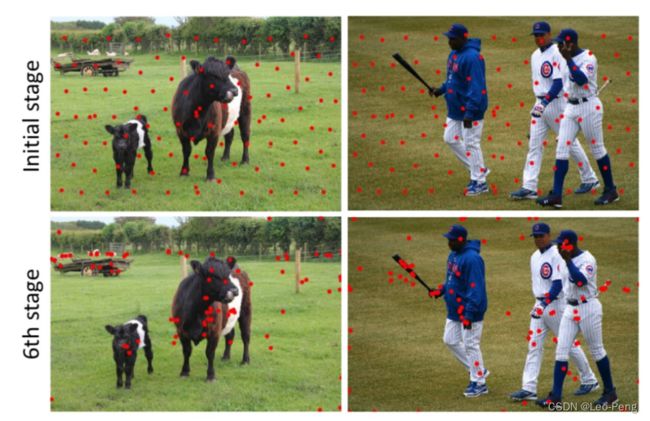
并且还对比了不同的初始化Refeence Point在收敛后的分布趋近于是相同的:
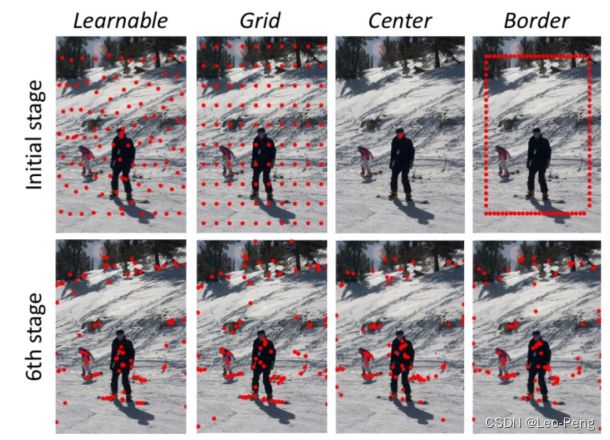
因此作者得出结论:在的Decoder中,只要堆叠的层数足够多,迭代时间足够长,不同的初始化Object Query都能收敛到相似的状态。因此文章的研究目标就变成了,我们如何通过尽可能少的Decoder层数,尽可能少的迭代次数使得网络达到同样好的效果。就此作者提出了Efficient Net,网络结构如下:
1.2 Dense and Sparse Part
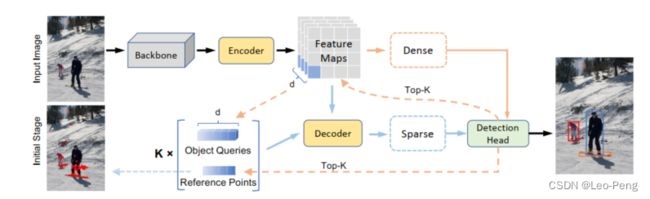
网络先通过ResNet提取多尺度特征,然后Defomable Encoder得到Feature Maps,其中Dense部分是就是在Feature Map上直接接一个Detection Head,Detection Head包括Classification Branch和Regression Branch,其中Classification为一层MLP用于获取类别,Regression Branch为三层MLP用于获取Anchor的4个回归参数,Feature Maps通过Dense部分会给每个特征像素都输出若干Anchor。
对于Dense部分输出的Anchor,Sparse部分会选取得分最高的前K个。其中:
- Anchor的几何信息作为Reference Points的初始位置;
- Anchor对应的Feature Maps上的256维Feature作为Object Query的初始值;
- Sparse部分和Dense部分共用同一个Detection Head**。
这三点都可以帮助Sparse 部分更快地收敛,最后网络输出的结果是从Sparse部分输出的结果中获得的。还有一个训练技巧时,在训练初期,由于Dense部分并不能很好地对Feature Maps进行预测,因此Sparse部分会选取300个Proposal的Object Query,而随着训练逐渐收敛,会线性地将Object Query降到100个。
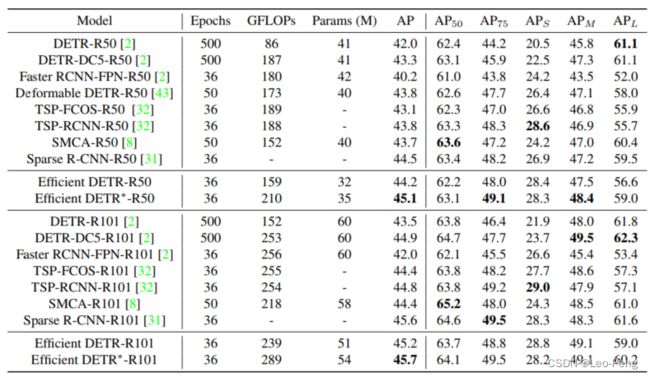
在最后的结果中,Efficient Net仅使用了三层Deformable Encoder和一层Deformable Decoder就使得性能超过了原始六层的Deformable DETR:
Efficient DETR似乎没有开源,个人觉得Effcient DETR需要依赖一个Dense Part,我觉得耗时应该不会低,不能称作真正意义上的“Efficient”,但是其研究过程还是很能帮助我们去更好地理解DETR这类方法范式的。
2. Anchor DETR
Anchor DETR发表于2022的AAAI,文章的主要思想是通过给每个可学习的Query Embedding赋予明确的物理意义,使其聚焦于特定的区域。
2.1 Anchor Points to Object Query
在原始DETR中,Attention公式如下: Attention ( Q , K , V ) = softmax ( Q K T d k ) V \operatorname{Attention}(Q, K, V)=\operatorname{softmax}\left(\frac{Q K^T}{\sqrt{d_k}}\right) V Attention(Q,K,V)=softmax(dkQKT)V Q = Q f + Q p , K = K f + K p , V = V f , Q=Q_f+Q_p, K=K_f+K_p, V=V_f, Q=Qf+Qp,K=Kf+Kp,V=Vf,对于Decoder中的Self Attention, K f , V f , Q f ∈ R N q × C K_f,V_f,Q_f\in R^{N_q \times C} Kf,Vf,Qf∈RNq×C均为解码器的输出, K p , Q p ∈ R N q × C K_p,Q_p\in R^{N_q \times C} Kp,Qp∈RNq×C均为可学习的Positional Embedding Q p = Embedding ( N q , C ) Q_p=\operatorname{Embedding}\left(N_q, C\right) Qp=Embedding(Nq,C)对于Decoder中的Cross Attention, Q f ∈ R N q × C Q_f \in R^{N_q \times C} Qf∈RNq×C为Self Attention的输出, K f ∈ R H W × C K_f \in R^{H W \times C} Kf∈RHW×C和 V f ∈ R H W × C V_f \in R^{H W \times C} Vf∈RHW×C为编码器的输出特征, K p ∈ R H W × C K_p \in R^{H W \times C} Kp∈RHW×C为输出特征的Positional Embedding, Q p ∈ R N q × C Q_p\in R^{N_q \times C} Qp∈RNq×C仍然由可学西的Positional Embedding生成,生成方式为: K p = g s i n ( Pos k ) K_p=g_{s i n}\left(\operatorname{Pos}_k\right) Kp=gsin(Posk) Q p = Embedding ( N q , C ) Q_p=\operatorname{Embedding}\left(N_q, C\right) Qp=Embedding(Nq,C) Q p ∈ R N q × C Q_p\in R^{N_q \times C} Qp∈RNq×C的可解释性比较差,我们只知道它对不同的Query不同,但是有什么不同我们并不知道,因此作者提出将 Q p ∈ R N q × C Q_p\in R^{N_q \times C} Qp∈RNq×C修改为通过Anchor Points生成 Q p = g ( Pos q ) Q_p=g\left(\operatorname{Pos}_q\right) Qp=g(Posq)
本文作者是选用了两种类型的锚点:Grid Anchor Points和Learned Anchor Points,如下图所示:
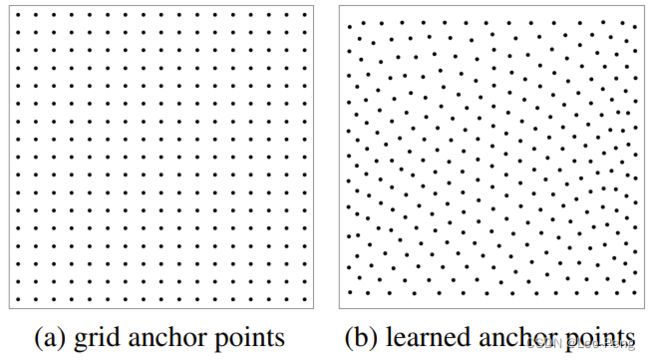
Grid Anchor Points代码如下:
# 均匀网格锚点
nx=ny=round(math.sqrt(self.num_position))
self.num_position=nx*ny
x = (torch.arange(nx) + 0.5) / nx
y = (torch.arange(ny) + 0.5) / ny
xy=torch.meshgrid(x,y)
reference_points=torch.cat([xy[0].reshape(-1)[...,None],xy[1].reshape(-1)[...,None]],-1).cuda()
reference_points = reference_points.unsqueeze(0).repeat(bs, self.num_pattern, 1)
Learned Anchor Points代码如下:
# 可学习锚点
self.position = nn.Embedding(self.num_position, 2) # (300, 2)
nn.init.uniform_(self.position.weight.data, 0, 1)
reference_points = self.position.weight.unsqueeze(0).repeat(bs, self.num_pattern, 1)
基于Anchor Points生成Query Embedding代码如下:
# pos2posemb2d 使用sine、consine函数生成位置编码
# adapt_pos2d 使用MLP微调位置编码
query_pos = adapt_pos2d(pos2posemb2d(reference_points))
作者又考虑到,对于每个锚点可能会存在多个目标,因此作者进一步将 Q f Q_f Qf的维度设置为 Q p ∈ R N p N A × C Q_p \in \mathbb{R}^{N_p N_A \times C} Qp∈RNpNA×C,即一共有 N A N_A NA个Query,每个Query的维度为 Q f i ∈ R N p × C Q_f^i \in R^{N_p \times C} Qfi∈RNp×C,即 Q f i = Embedding ( N p , C ) Q_f^i=\operatorname{Embedding}\left(N_p, C\right) Qfi=Embedding(Np,C)通过 N p N_p Np不会太大,在原始的代码中设置为3。对应代码如下:
# 3, 256
self.pattern = nn.Embedding(self.num_pattern, d_model)
# object queries
# 由于平移不变性,每个object query的pattern的值应该是一样的
# For the property of translation invariance, the patterns are shared for all the object queries
tgt = self.pattern.weight.reshape(1, self.num_pattern, 1, c).repeat(bs, 1, self.num_position, 1).reshape(
bs, self.num_pattern * self.num_position, c)
通过这样的 Q p Q_p Qp和 Q f Q_f Qf构成的Query Embedding具备可解释性,在训练Epoch数少10倍的情况下,依然可以获得比DETR更好的效果。
2.2 Row-Column Decoupled Attention
在本文中,为了降低计算负担,作者还提出了Row-Column Decoupled Attention,即将Key特征解耦为横向特征和纵向特征,如下: A x = softmax ( Q x K x T d k ) , A x ∈ R N q × W A_x=\operatorname{softmax}\left(\frac{Q_x K_x^T}{\sqrt{d_k}}\right), A_x \in \mathbb{R}^{N_q \times W} Ax=softmax(dkQxKxT),Ax∈RNq×W Z = weightedSumW ( A x , V ) , Z ∈ R N q × H × C , Z=\text { weightedSumW }\left(A_x, V\right), Z \in \mathbb{R}^{N_q \times H \times C}, Z= weightedSumW (Ax,V),Z∈RNq×H×C, A y = softmax ( Q y K y T d k ) , A y ∈ R N q × H A_y=\operatorname{softmax}\left(\frac{Q_y K_y^T}{\sqrt{d_k}}\right), A_y \in \mathbb{R}^{N_q \times H} Ay=softmax(dkQyKyT),Ay∈RNq×H Out = weightedSumH ( A y , Z ) , Out ∈ R N q × C \text { Out }=\text { weightedSumH }\left(A_y, Z\right), \text { Out } \in \mathbb{R}^{N_q \times C} Out = weightedSumH (Ay,Z), Out ∈RNq×C Q x = Q f + Q p , x , Q y = Q f + Q p , y , Q_x=Q_f+Q_{p, x}, \quad Q_y=Q_f+Q_{p, y}, Qx=Qf+Qp,x,Qy=Qf+Qp,y, Q p , x = g 1 D ( Pos q , x ) , Q p , y = g 1 D ( Pos q , y ) Q_{p, x}=g_{1 D}\left(\operatorname{Pos}_{q, x}\right), \quad Q_{p, y}=g_{1 D}\left(\operatorname{Pos}_{q, y}\right) Qp,x=g1D(Posq,x),Qp,y=g1D(Posq,y) K x = K f , x + K p , x , K y = K f , y + K p , y K_x=K_{f, x}+K_{p, x}, \quad K_y=K_{f, y}+K_{p, y} Kx=Kf,x+Kp,x,Ky=Kf,y+Kp,y K p , x = g 1 D ( Pos k , x ) , K p , y = g 1 D ( Pos k , y ) , K_{p, x}=g_{1 D}\left(\operatorname{Pos}_{k, x}\right), \quad K_{p, y}=g_{1 D}\left(\operatorname{Pos}_{k, y}\right), Kp,x=g1D(Posk,x),Kp,y=g1D(Posk,y), V = V f , V ∈ R H × W × C V=V_f, \quad V \in \mathbb{R}^{H \times W \times C} V=Vf,V∈RH×W×C其中 weightedSumW \text { weightedSumW } weightedSumW 和 weightedSumH \text { weightedSumH } weightedSumH 分别沿着宽度维度和高度维度进行加权, g 1 D g_{1 D} g1D表示一维的位置编码。具体代码如下:
# 拆分键的行列特征
k_row = K_row.mean(1)
k_col = k_col.mean(2)
然后依次执行行列注意力:
# 计算行列注意力权重Ax,Ay
scaling = float(head_dim) ** -0.5
q_row = q_row * scaling
q_col = q_col * scaling
attn_output_weights_row = torch.bmm(q_row, k_row.transpose(1, 2))
attn_output_weights_col = torch.bmm(q_col, k_col.transpose(1, 2))
attn_output_weights_col = softmax(attn_output_weights_col, dim=-1)
attn_output_weights_row = softmax(attn_output_weights_row, dim=-1)
# Z=Ax*V
attn_output_row = torch.matmul(attn_output_weights_row,v)
# Out=A_y*Z
attn_output = torch.matmul(attn_output_weights_col,attn_output_row)
最后结果对比三种,在十分之一的训练Epoch数下,Anchor DETR就已经超过原始DETR: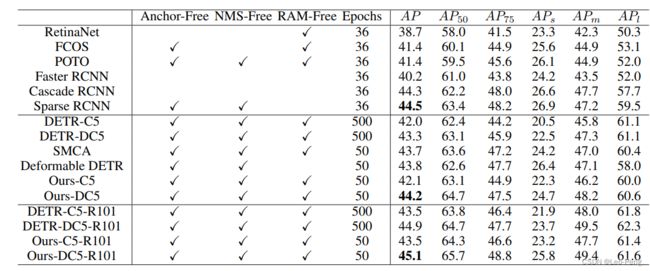
综上所述,Anchor DETR通过Query Embedding中加入Anchor Point的设计,最后Decoder的输出用于回归到每个Anchor Point的偏移量,使得每个Query Embedding只预测Anchor Point附近的目标,简化了优化目标,达到了更好的性能。
3. Conditional DETR
Conditional DETR发表于2021年ICCV,文章的主要贡献是通过Conditional Spatial Query显示地寻找物体的区域范围,从而缩小物体搜索范围,仅仅通过Cross Attention中的微小改动就可以将收敛速度提高6-10倍。
3.1 Attention Maps
和Efficient DETR一样,Conditional DETR的文章中同样也是先对DETR收敛慢的原因进行了一波分析。作者首先可视化了DETR Decoder的Attention Map如下图所示:
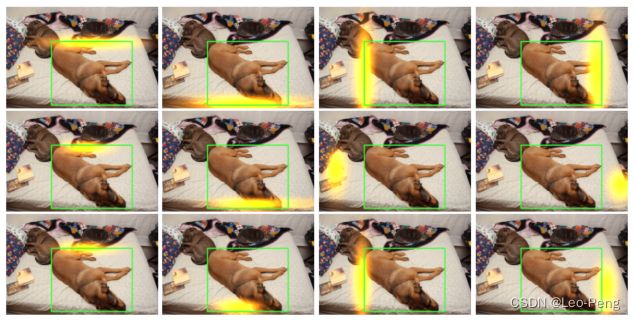
其中前三行分别是训练50个Epoch的Conditional DETR的热力图,训练50个Epoch的DETR,训练500个Epoch的DETR,从热力图上看,训练500个Epoch的DETR的结果要明显优于50个Epoch,但是要都劣于Conditional DETR。那么这个Attention Map是如何获得的呢?我们知道MultiHead Attention的公式如下: Attention ( Q , K , V ) = softmax ( Q K T d k ) V \text { Attention }(\mathrm{Q}, \mathrm{K}, \mathrm{V})=\operatorname{softmax}\left(\frac{\mathrm{QK}^{\mathrm{T}}}{\sqrt{\mathrm{d}_{\mathrm{k}}}}\right) \mathrm{V} Attention (Q,K,V)=softmax(dkQKT)V MultiHead ( Q , K , V ) = Concat ( head 1 , … , head h ) W O \text { MultiHead }(\mathrm{Q}, \mathrm{K}, \mathrm{V})=\operatorname{Concat}\left(\operatorname{head}_1, \ldots, \text { head }_{\mathrm{h}}\right) \mathrm{W}^{\mathrm{O}} MultiHead (Q,K,V)=Concat(head1,…, head h)WO where head = Attention ( Q W i Q , K W i K , V W i V ) \text { where head }=\text { Attention }\left(\mathrm{QW}_{\mathrm{i}}^{\mathrm{Q}}, \mathrm{KW}_{\mathrm{i}}^{\mathrm{K}}, \mathrm{V} \mathrm{W}_{\mathrm{i}}^{\mathrm{V}}\right) where head = Attention (QWiQ,KWiK,VWiV)Attention即上述 Q K T \mathrm{QK}^{\mathrm{T}} QKT部分,在DETR中,每个Head的 Q \mathrm{Q} Q的大小为 850 × 256 850 \times 256 850×256, K \mathrm{K} K的大小为 100 × 256 100 \times 256 100×256, Q K T \mathrm{QK}^{\mathrm{T}} QKT的大小为 856 × 100 856 \times 100 856×100,最后经过Softmax和Resize得到 25 × 24 × 1 25 \times 24 \times 1 25×24×1大小的Attention Maps。正好我在Github找到一位同学分享的DETR的Attention Map的可视化结果链接,l如下图所示:
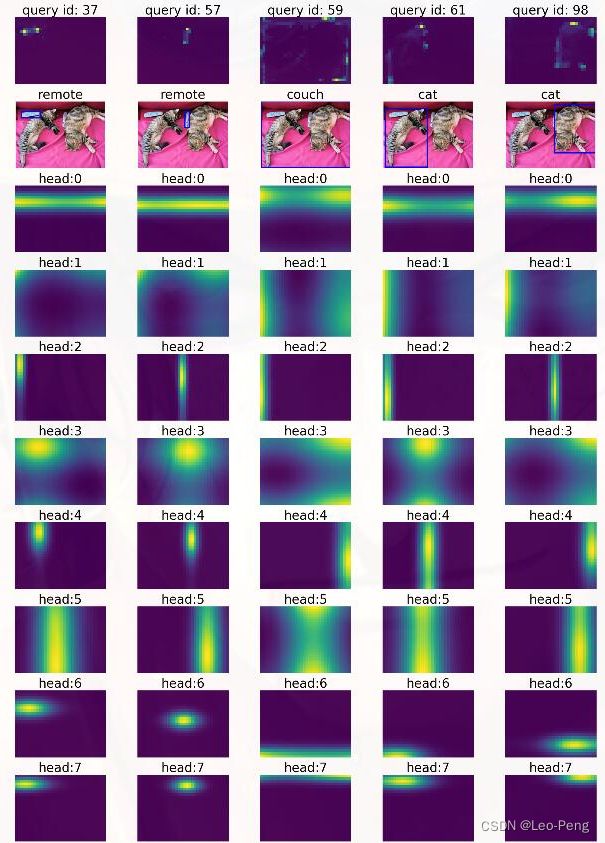
从上述结果中我们可以看到,不同的Head关注不同区域的图像特征,但是同一个Head关注的关注的区域是类似的,比如上述Head2关注的是目标的左边界,Head3关注的目标本身。这一点也很好解释,因为不同Query的Head的从Concat到最后的Detection Branch都是权重共享的,因此不同Query之间的同一位置的Head关注的内容是类似的。在计算机视觉算法——Vision Transformer / Swin Transformer我们也有过类似的分析。
回到问题本身,所以作者认为,DETR收敛慢的原因是Attention Maps没有难以收敛,那么是什么原因导致Attention Maps难以收敛了,文章进一步对Cross Attention的本质进行了分析
3.2 DETR Decoder Cross-Attention
DETR的结构图下图所示:
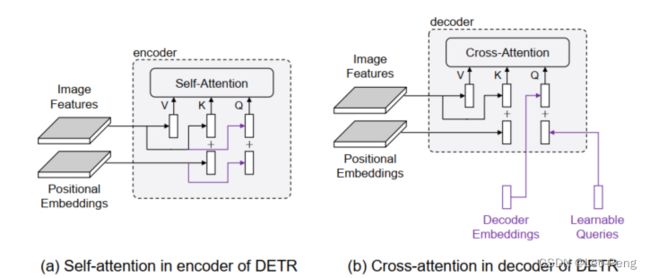
其中:
- 在Decoder中, K \mathrm{K} K是Image Features + Positional Embedding, Q \mathrm{Q} Q是Decoder Embedding + Object Queriy
- Q \mathrm{Q} Q中的Decoder Embedding实际上是上一层Decoder的输出,也就是 V \mathrm{V} V根据Attention Maps取出来的一部分,这个步骤有点类似于Two Stage里面的ROI Pooling,但区别是Cross Atention中取的不是一个区域,而是整个区域经过全局注意力之后的结果;Proposal中的Content信息(内容和图像 颜色、纹理等是相关的)则来源于Decoder Embedding
- Q \mathrm{Q} Q中Object Query可以类比是Positional Embedding,仅仅包含了Proposal中的Spatial信息,Spatial代表这个向量它更多包含空间上的信息
- DETR中将两者Add后继续和Feature计算Attention Maps,继续获取下一层的Decoder Embedding.
有了上述理解后,作者抛出了问题,在DETR中是 Q \mathrm{Q} Q将Content Query c q c_q cq(Decoder Embedding)和Spatial Query p q p_q pq(Object Query)相加得到,而 K \mathrm{K} K是将Content Key c k c_k ck(Image Features)和Spatial Key p k p_k pk(Postional Embedding)相加得到,因此他们进行Cross Attention计算时形式如下: ( c q + p q ) T ( c k + p k ) \left(c_q+p_q\right)^{\mathrm{T}}\left(c_k+p_k\right) (cq+pq)T(ck+pk) = c q T c k + c q T p k + p q T c k + p q T p k =c_q^{\mathrm{T}} c_k+c_q^{\mathrm{T}} p_k+p_q^{\mathrm{T}} c_k+p_q^{\mathrm{T}} p_k =cqTck+cqTpk+pqTck+pqTpk = c q T c k + c q T p k + o q T c k + o q T p k =c_q^{\mathrm{T}} c_k+c_q^{\mathrm{T}} p_k+o_q^{\mathrm{T}} c_k+o_q^{\mathrm{T}} p_k =cqTck+cqTpk+oqTck+oqTpk因为Content Query和Spatial Quedy应该是无关的,即Proposal的位置信息和Proposal的内容信息应该是相互独立的,但在DETR的Cross Attention中这两者会相互影响,而前期Content Query的质量不高,因此无法准确地优化Spatial Query,进而导致收敛缓慢。因此作者提出将相加的操作改为Concate,这样两者进行内积变成如下形式: c q T c k + p q T p k c_q^{\mathrm{T}} c_k+p_q^{\mathrm{T}} p_k cqTck+pqTpk其中第一项专门负责Content相似度计算,第二项专门负责Spatial相似度计算,互不影响、但是在后续作者的讨论中,作者提到Concat操作并不是他们想要强调的Contribution,并且在DETR中将Add操作修改为Conca操作最终的结果反而下降了,但是重要的是通过上述分析我们知道了DETR收敛困难的核心原因
3.3 Conditional Spatial Query Prediction
根据上面的分析结果,作者提出了Condition Spatial Query的结果如下图所示:
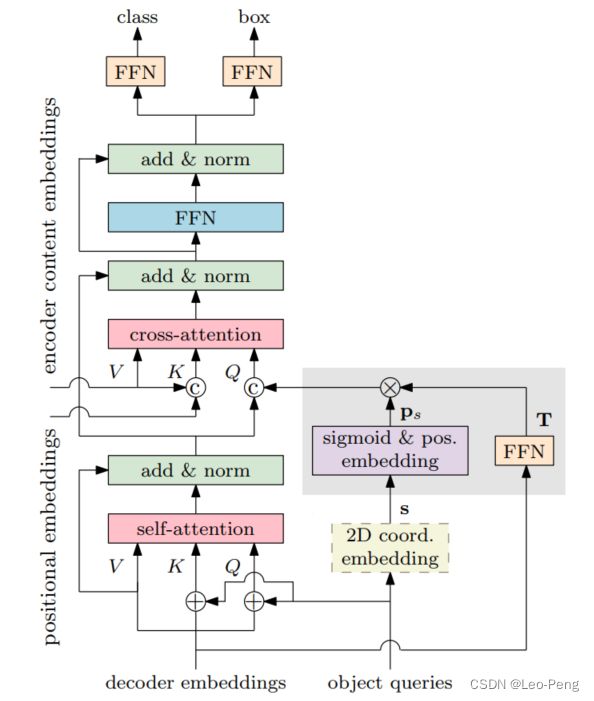
其中:
- Q \mathrm{Q} Q和 K \mathrm{K} K中的Content Query和Spatial Query的Add操作修改为了Concat操作;
- Q \mathrm{Q} Q中的Object Query变成由Reference Points s \mathrm{s} s和Decoder Embedding f \mathrm{f} f两部分构成,即 ( s , f ) → p q (\mathbf{s}, \mathbf{f}) \rightarrow p_q (s,f)→pq其中Reference Point的2D坐标归一化之后映射到和Spatial Key相同的正弦位置编码空间中,得到Reference Point的高维映射: p s = sinusoidal ( sigmoid ( s ) ) p_s=\operatorname{sinusoidal}(\operatorname{sigmoid}(\mathrm{\mathbf{s}})) ps=sinusoidal(sigmoid(s))而Decoder Embedding通过Feed Forward Network(Linear+ReLU+Linear)映射到高维空间,获得针对Reference Point的偏移量: T = F F N ( f ) \mathrm{T}=\mathrm{FFN}(\mathrm{\mathbf{f}}) T=FFN(f)将Reference Point以及对应的偏移量在高维空间相乘就得到最后的Object Query: p q = T p s = λ q ⊙ p s p_q=\mathrm{T} p_s=\lambda_q \odot p_s pq=Tps=λq⊙ps这里的相乘指的其实就是 p s p_s ps和 T T T在逐个元素位置上的点乘。在最后Detection Branch部分,Bounding Box的回归结果也变成由Reference Point和偏移量两部分组成: b = sigmoid ( F F N ( f ) + [ s ⊤ 0 0 ] ⊤ ) \mathbf{b}=\operatorname{sigmoid}\left(\mathrm{FFN}(\mathbf{f})+\left[\begin{array}{lll} \mathbf{s}^{\top} & 0 & 0 \end{array}\right]^{\top}\right) b=sigmoid(FFN(f)+[s⊤00]⊤)对于类别的输出还是在Decoder Embedding的基础上通过MLP输出: e = F F N ( f ) \mathbf{e}=\mathrm{FFN}(\mathbf{f}) e=FFN(f)
下面我们通过代码来进一步看下实现的细节,Conditional DETR的代码是基于DETR的工程修改的,下面仅展示修改部分:
# 对应结构图中FFN
class MLP(nn.Module):
""" Very simple multi-layer perceptron (also called FFN)"""
def __init__(self, input_dim, hidden_dim, output_dim, num_layers):
super().__init__()
self.num_layers = num_layers
h = [hidden_dim] * (num_layers - 1)
self.layers = nn.ModuleList(nn.Linear(n, k) for n, k in zip([input_dim] + h, h + [output_dim]))
def forward(self, x):
for i, layer in enumerate(self.layers):
x = F.relu(layer(x)) if i < self.num_layers - 1 else layer(x)
return x
# 将参考点s变成256维度的sincos的编码
def gen_sineembed_for_position(pos_tensor):
# n_query, bs, _ = pos_tensor.size()
# sineembed_tensor = torch.zeros(n_query, bs, 256)
scale = 2 * math.pi
dim_t = torch.arange(128, dtype=torch.float32, device=pos_tensor.device) # 在0到128维上均匀分布
dim_t = 10000 ** (2 * (dim_t // 2) / 128)
x_embed = pos_tensor[:, :, 0] * scale # 将值的范围放缩到0到2pi
y_embed = pos_tensor[:, :, 1] * scale
pos_x = x_embed[:, :, None] / dim_t # 每一元素除以的dimt的值都不同
pos_y = y_embed[:, :, None] / dim_t
pos_x = torch.stack((pos_x[:, :, 0::2].sin(), pos_x[:, :, 1::2].cos()), dim=3).flatten(2)
pos_y = torch.stack((pos_y[:, :, 0::2].sin(), pos_y[:, :, 1::2].cos()), dim=3).flatten(2)
pos = torch.cat((pos_y, pos_x), dim=2)
return pos
class TransformerDecoder(nn.Module):
def __init__(self, decoder_layer, num_layers, norm=None, return_intermediate=False, d_model=256):
super().__init__()
self.layers = _get_clones(decoder_layer, num_layers)
self.num_layers = num_layers
self.norm = norm
self.return_intermediate = return_intermediate
self.query_scale = MLP(d_model, d_model, d_model, 2)
self.ref_point_head = MLP(d_model, d_model, 2, 2)
for layer_id in range(num_layers - 1):
self.layers[layer_id + 1].ca_qpos_proj = None
def forward(self, tgt, memory,
tgt_mask: Optional[Tensor] = None,
memory_mask: Optional[Tensor] = None,
tgt_key_padding_mask: Optional[Tensor] = None,
memory_key_padding_mask: Optional[Tensor] = None,
pos: Optional[Tensor] = None, # nn.Embedding(num_queries, hidden_dim)
query_pos: Optional[Tensor] = None): # query_pos,从backbone中输出的和feature大小相同的的position embedding
# 和原始DETR相同,这里的tgt均被初始化为0
output = tgt
intermediate = []
reference_points_before_sigmoid = self.ref_point_head(query_pos) # [num_queries, batch_size, 2], 从每一个query embedding中回归出两个坐标点
reference_points = reference_points_before_sigmoid.sigmoid().transpose(0, 1)
# 开始遍历6层Decoder Layer
for layer_id, layer in enumerate(self.layers):
# 计算中心
obj_center = reference_points[..., :2].transpose(0, 1) # [num_queries, batch_size, 2]
# 计算偏移量
# For the first decoder layer, we do not apply transformation over p_s
if layer_id == 0:
pos_transformation = 1
else:
pos_transformation = self.query_scale(output) # 从decoder embedding中计算出偏移量,decoder embeding(tgt)和query embedding维度是相同的
# 执行Pq = MLP(PE(obj_center)),将中心点转成256维度的嵌入向量
# get sine embedding for the query vector
query_sine_embed = gen_sineembed_for_position(obj_center)
# 中心点乘以偏移量得到最后的Pq
# apply transformation
query_sine_embed = query_sine_embed * pos_transformation
output = layer(output, memory, tgt_mask=tgt_mask,
memory_mask=memory_mask,
tgt_key_padding_mask=tgt_key_padding_mask,
memory_key_padding_mask=memory_key_padding_mask,
pos=pos, query_pos=query_pos, query_sine_embed=query_sine_embed,
is_first=(layer_id == 0))
if self.return_intermediate:
intermediate.append(self.norm(output))
if self.norm is not None:
output = self.norm(output)
if self.return_intermediate:
intermediate.pop()
intermediate.append(output)
if self.return_intermediate:
return [torch.stack(intermediate).transpose(1, 2), reference_points]
return output.unsqueeze(0)
其中decoder_layer的forward函数定义如下:
def forward_post(self, tgt, memory, # tgt为初始化为0大小和pos
tgt_mask: Optional[Tensor] = None,
memory_mask: Optional[Tensor] = None,
tgt_key_padding_mask: Optional[Tensor] = None,
memory_key_padding_mask: Optional[Tensor] = None,
pos: Optional[Tensor] = None, # nn.Embedding(num_queries, hidden_dim),在代码中是没有使用的
query_pos: Optional[Tensor] = None, # 从backbone中输出的和feature大小相同的的position embedding
query_sine_embed = None, # 通过decoder embedding修正后的query pos
is_first = False):
# ========== Begin of Self-Attention =============
# Apply projections here 进行特征映射
# shape: num_queries x batch_size x 256
q_content = self.sa_qcontent_proj(tgt) # target is the input of the first decoder layer. zero by default.
q_pos = self.sa_qpos_proj(query_pos)
k_content = self.sa_kcontent_proj(tgt)
k_pos = self.sa_kpos_proj(query_pos)
v = self.sa_v_proj(tgt)
num_queries, bs, n_model = q_content.shape # query的个数、batch size、query的channel数
hw, _, _ = k_content.shape
q = q_content + q_pos # 在self attention部分是相加
k = k_content + k_pos
tgt2 = self.self_attn(q, k, value=v, attn_mask=tgt_mask,
key_padding_mask=tgt_key_padding_mask)[0]
# ========== End of Self-Attention =============
tgt = tgt + self.dropout1(tgt2) # dropout
tgt = self.norm1(tgt)
# ========== Begin of Cross-Attention =============
# Apply projections here
# shape: num_queries x batch_size x 256
q_content = self.ca_qcontent_proj(tgt)
k_content = self.ca_kcontent_proj(memory)
v = self.ca_v_proj(memory)
num_queries, bs, n_model = q_content.shape # query的个数、batch size、query的channel数
hw, _, _ = k_content.shape
k_pos = self.ca_kpos_proj(pos)
# For the first decoder layer, we concatenate the positional embedding predicted from
# the object query (the positional embedding) into the original query (key) in DETR.
if is_first:
q_pos = self.ca_qpos_proj(query_pos)
q = q_content + q_pos
k = k_content + k_pos
else:
q = q_content
k = k_content
q = q.view(num_queries, bs, self.nhead, n_model//self.nhead)
query_sine_embed = self.ca_qpos_sine_proj(query_sine_embed)
query_sine_embed = query_sine_embed.view(num_queries, bs, self.nhead, n_model//self.nhead)
q = torch.cat([q, query_sine_embed], dim=3).view(num_queries, bs, n_model * 2) # 将content query和spatial query concate到一起
k = k.view(hw, bs, self.nhead, n_model//self.nhead)
k_pos = k_pos.view(hw, bs, self.nhead, n_model//self.nhead)
k = torch.cat([k, k_pos], dim=3).view(hw, bs, n_model * 2) # 对key进行同样的concate操作
tgt2 = self.cross_attn(query=q,
key=k,
value=v, attn_mask=memory_mask,
key_padding_mask=memory_key_padding_mask)[0]
# ========== End of Cross-Attention =============
tgt = tgt + self.dropout2(tgt2)
tgt = self.norm2(tgt)
tgt2 = self.linear2(self.dropout(self.activation(self.linear1(tgt))))
tgt = tgt + self.dropout3(tgt2)
tgt = self.norm3(tgt)
return tgt
最后网络输出的部分和原始的DETR也会有区别,如下:
hs, reference = self.transformer(self.input_proj(src), mask, self.query_embed.weight, pos[-1])
reference_before_sigmoid = inverse_sigmoid(reference)
outputs_coords = []
for lvl in range(hs.shape[0]):
tmp = self.bbox_embed(hs[lvl])
tmp[..., :2] += reference_before_sigmoid
outputs_coord = tmp.sigmoid()
outputs_coords.append(outputs_coord)
outputs_coord = torch.stack(outputs_coords)
outputs_class = self.class_embed(hs)
如上文所述,Box的坐标最终是由Reference Points和通过Decoder Embedding回归的偏移量组合而成,如下图是DETR和Conditional DETR的效果对比,不论是训练速度和评测结果看后者都有明显的优势:
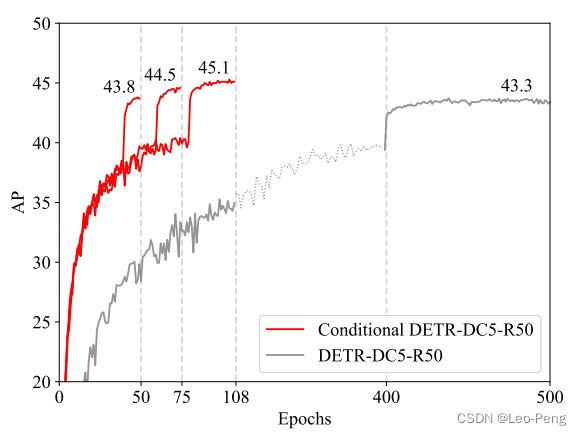
总而言之,Conditional DETR主要进行了两部分改进,首先是解耦了Content Query和Positional Query,减少了训练初期的噪声;其次Positional Query映射成Reference Point(类似于Anchor),并从Content Query中预测偏移量调整Reference Point,这样其实相当于建立了基于偏移量对Query的直接监督。
4. DAB DETR
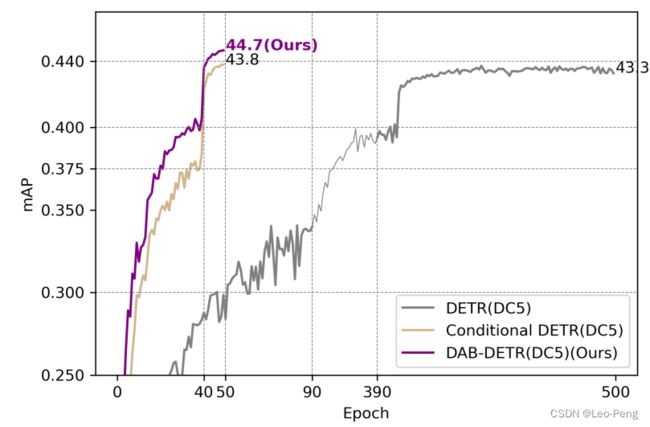
DAB DETR发表与ICLR 2022,相对Condition DETR,本文的主要区别是使用Dynamic 4D Anchor Box对Query进行建模,即将宽高引入位置先验,使得收敛速度和检测精度进一步提高:
4.1 Analysis on Positional Prior
如同前面两篇文章,本文同样先对收敛慢的原因进行了一波分析,之前的工作已经证明了收敛慢主要是Decoder的问题,作者进一步指出是Decoder中Query的问题,主要是两方面:
- Query比较难学习
- Query中没有类似于Positional Embedding的显示的位置先验信息
对于上述第一点,作者使用COCO数据集将Query训练好,然后将Query固定住训练其他模块,结果并没有达到更快的收敛速度,如下图所示:
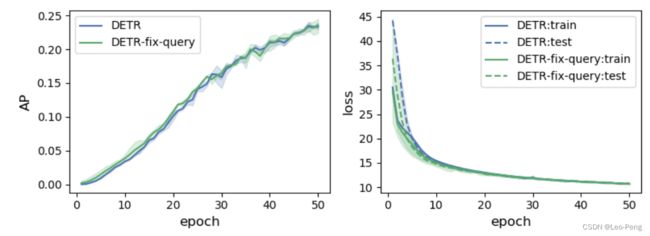
可以看出,即使给Query一个很好的先验也并不会加快收敛速度,因此上述第一点并不是关键原因。对于上述第二点原因,作者可视化了由Positional Query和Position Key构成的Positional Attention Map,DETR、Conditional DETR和DAB DETR三种模型的可视化如下:
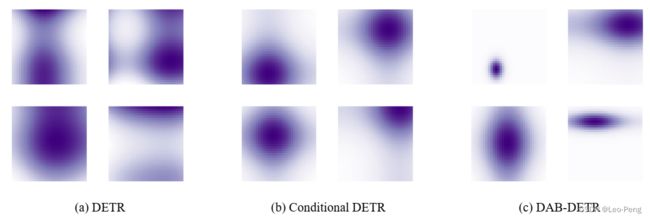
从上图中可以看出来,对于DETR,一个Query会关注到多个区域,因此当图片中出现多个物体时,每个Query并不知道自己应该关注哪一个。对于Conditaion DETR,其通过提供二维的位置先验使得每个Query只会关注一个区域,但是每个Query关注的区域都是标准的圆形,忽略了物体尺度大小差异。当然我们也可以观察到,DAB正是因为将宽、高引入位置先验,Query开始关注的物体尺寸大小也不再相同。下面我们直接来看DAB DETR是如何做到这一点的。
4.2 Learning and Update Anchor Box
DAB DETR网络如下图所示:
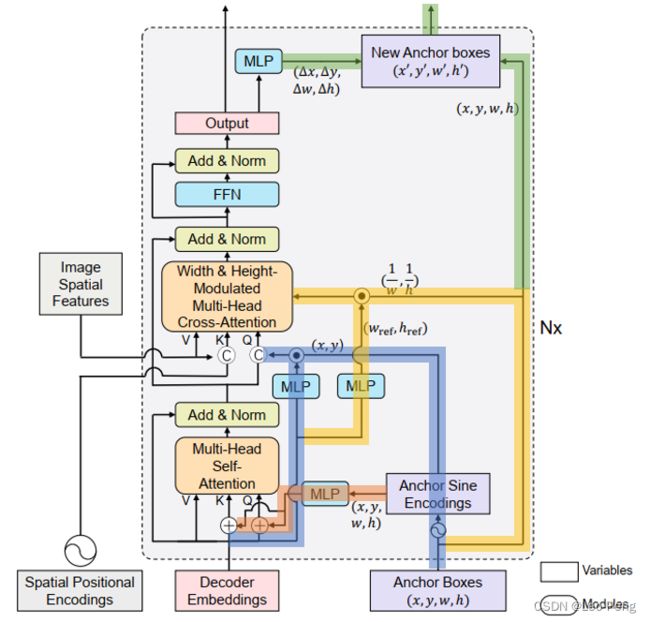
DAB DETR是在Conditional DETR的基础上进行改进的,因此上文在Conditional DETR中介绍的Content Query和Spatial Query在DAB DETR中也是适用的,我们对其中不同的通路打上不同的颜色,其中红色通路是将Anchor Boxes编码Query然后进行Self Attention,编码方式如下: P q = MLP ( PE ( A q ) ) , P_q=\operatorname{MLP}\left(\operatorname{PE}\left(A_q\right)\right), Pq=MLP(PE(Aq)), PE ( A q ) = PE ( x q , y q , w q , h q ) = Cat ( PE ( x q ) , PE ( y q ) , PE ( w q ) , PE ( h q ) ) \operatorname{PE}\left(A_q\right)=\operatorname{PE}\left(x_q, y_q, w_q, h_q\right)=\operatorname{Cat}\left(\operatorname{PE}\left(x_q\right), \operatorname{PE}\left(y_q\right), \operatorname{PE}\left(w_q\right), \operatorname{PE}\left(h_q\right)\right) PE(Aq)=PE(xq,yq,wq,hq)=Cat(PE(xq),PE(yq),PE(wq),PE(hq))其中 PE ( A q ) \operatorname{PE}\left(A_q\right) PE(Aq)操作是指通过一个Positional Encoding函数以及一个MLP将一个浮点数变成Sinusoidal Embedding,对于不同层MLP是参数共享的,在Self Attention中,我们是通过相加操作融合Content Query和Spatial Query: Q q = C q + P q , K q = C q + P q , V q = C q Q_q=C_q+P_q, \quad K_q=C_q+P_q, \quad V_q=C_q Qq=Cq+Pq,Kq=Cq+Pq,Vq=Cq其中蓝色通路和黄色通路是将Anchor Boxes编码Query然后进行Self Attention,其中蓝色通路上先将Anchor Boxes的 x , y x, y x,y编码进入Query: Q q = Cat ( C q , PE ( x q , y q ) ⋅ MLP ( c s q ) ( C q ) ) , Q_q=\operatorname{Cat}\left(C_q, \operatorname{PE}\left(x_q, y_q\right) \cdot \operatorname{MLP}^{(\mathrm{csq})}\left(C_q\right)\right), Qq=Cat(Cq,PE(xq,yq)⋅MLP(csq)(Cq)), K x , y = Cat ( F x , y , PE ( x , y ) ) , V x , y = F x , y K_{x, y}=\operatorname{Cat}\left(F_{x, y}, \operatorname{PE}(x, y)\right), \quad V_{x, y}=F_{x, y} Kx,y=Cat(Fx,y,PE(x,y)),Vx,y=Fx,y这一步骤和Conditional DETR中的操作是一致的,会将Decoder Embeding通过一个MLP编码通过点乘修正 PE ( x q , y q ) \operatorname{PE}\left(x_q, y_q\right) PE(xq,yq)。如果我们不考虑Anchor Box的长宽的影响,在Cross Attention中,Position Similarity计算如下: Attn ( ( x , y ) , ( x r e f , y r e f ) ) = ( PE ( x ) ⋅ PE ( x r e f ) + P E ( y ) ⋅ PE ( y r e f ) ) / D \operatorname{Attn}\left((x, y),\left(x_{\mathrm{ref}}, y_{\mathrm{ref}}\right)\right)=\left(\operatorname{PE}(x) \cdot \operatorname{PE}\left(x_{\mathrm{ref}}\right)+\mathrm{PE}(y) \cdot \operatorname{PE}\left(y_{\mathrm{ref}}\right)\right) / \sqrt{D} Attn((x,y),(xref,yref))=(PE(x)⋅PE(xref)+PE(y)⋅PE(yref))/D上图中黄色通路就是将Anchor Box的长宽的影响加入Position Similarity的计算中: Modulate Attn ( ( x , y ) , ( x r e f , y r e f ) ) = ( PE ( x ) ⋅ PE ( x r e f ) w q , r e f w q + PE ( y ) ⋅ PE ( y r e f ) h q , r e f h q ) / D \operatorname{Modulate} \operatorname{Attn}\left((x, y),\left(x_{\mathrm{ref}}, y_{\mathrm{ref}}\right)\right)=\left(\operatorname{PE}(x) \cdot \operatorname{PE}\left(x_{\mathrm{ref}}\right) \frac{w_{q, \mathrm{ref}}}{w_q}+\operatorname{PE}(y) \cdot \operatorname{PE}\left(y_{\mathrm{ref}}\right) \frac{h_{q, \mathrm{ref}}}{h_q}\right) / \sqrt{D} ModulateAttn((x,y),(xref,yref))=(PE(x)⋅PE(xref)wqwq,ref+PE(y)⋅PE(yref)hqhq,ref)/D其中 w q w_q wq和 h q h_q hq是Anchor Box的长宽, w q , r e f w_{q, \mathrm{ref}} wq,ref和 h q , r e f h_{q, \mathrm{ref}} hq,ref是通过Decoder Embedding计算的长宽。加入长宽的编码后,我们可以从不同长宽的物体的特征。
最后,上图中绿色通路是对Anchor进行更新,在DETR和Conditional DETR中,Query都是高维特征因此很难进行逐层Refine,但DAB DETR中使用的是坐标作为Query的表达,因此我们可以通过一个MLP从输出中回归一个修正量 ( Δ x , Δ y , Δ w , Δ h ) (\Delta x, \Delta y, \Delta w, \Delta h) (Δx,Δy,Δw,Δh)对Query的坐标进行修正。其实这里是由疑问的,在红色通路和蓝色通路中我们基于Cross Attention已经使用Decoder Embedding对Anchor信息进行过一次Refine,而这里我们通过绿色通路又进行了一次Refine,这不相当于重复Refine了吗?
下面我们基于源码进一步看下细节,DAB DETR是基于Conditional DETR修改的,我们主要看下修改部分:
def gen_sineembed_for_position(pos_tensor, d_model=256):
# n_query, bs, _ = pos_tensor.size()
# sineembed_tensor = torch.zeros(n_query, bs, 256)
scale = 2 * math.pi
dim_t = torch.arange(d_model // 2, dtype=torch.float32, device=pos_tensor.device)
dim_t = 10000 ** (2 * (dim_t // 2) / (d_model // 2))
x_embed = pos_tensor[:, :, 0] * scale
y_embed = pos_tensor[:, :, 1] * scale
pos_x = x_embed[:, :, None] / dim_t
pos_y = y_embed[:, :, None] / dim_t
pos_x = torch.stack((pos_x[:, :, 0::2].sin(), pos_x[:, :, 1::2].cos()), dim=3).flatten(2)
pos_y = torch.stack((pos_y[:, :, 0::2].sin(), pos_y[:, :, 1::2].cos()), dim=3).flatten(2)
if pos_tensor.size(-1) == 2:
pos = torch.cat((pos_y, pos_x), dim=2)
elif pos_tensor.size(-1) == 4: # 如果pos_tensor的维度是4,则需要将长度和宽度也进行编码
w_embed = pos_tensor[:, :, 2] * scale
pos_w = w_embed[:, :, None] / dim_t
pos_w = torch.stack((pos_w[:, :, 0::2].sin(), pos_w[:, :, 1::2].cos()), dim=3).flatten(2)
h_embed = pos_tensor[:, :, 3] * scale
pos_h = h_embed[:, :, None] / dim_t
pos_h = torch.stack((pos_h[:, :, 0::2].sin(), pos_h[:, :, 1::2].cos()), dim=3).flatten(2)
pos = torch.cat((pos_y, pos_x, pos_w, pos_h), dim=2)
else:
raise ValueError("Unknown pos_tensor shape(-1):{}".format(pos_tensor.size(-1)))
return pos
class TransformerDecoder(nn.Module):
def __init__(self, decoder_layer, num_layers, norm=None, return_intermediate=False,
d_model=256, query_dim=2, keep_query_pos=False, query_scale_type='cond_elewise',
modulate_hw_attn=False,
bbox_embed_diff_each_layer=False,
):
super().__init__()
self.layers = _get_clones(decoder_layer, num_layers)
self.num_layers = num_layers
self.norm = norm
self.return_intermediate = return_intermediate
assert return_intermediate
self.query_dim = query_dim
assert query_scale_type in ['cond_elewise', 'cond_scalar', 'fix_elewise']
self.query_scale_type = query_scale_type
if query_scale_type == 'cond_elewise':
self.query_scale = MLP(d_model, d_model, d_model, 2)
elif query_scale_type == 'cond_scalar':
self.query_scale = MLP(d_model, d_model, 1, 2)
elif query_scale_type == 'fix_elewise':
self.query_scale = nn.Embedding(num_layers, d_model)
else:
raise NotImplementedError("Unknown query_scale_type: {}".format(query_scale_type))
self.ref_point_head = MLP(query_dim // 2 * d_model, d_model, d_model, 2)
self.bbox_embed = None
self.d_model = d_model
self.modulate_hw_attn = modulate_hw_attn
self.bbox_embed_diff_each_layer = bbox_embed_diff_each_layer
if modulate_hw_attn:
self.ref_anchor_head = MLP(d_model, d_model, 2, 2)
if not keep_query_pos:
for layer_id in range(num_layers - 1):
self.layers[layer_id + 1].ca_qpos_proj = None
def forward(self, tgt, memory,
tgt_mask: Optional[Tensor] = None,
memory_mask: Optional[Tensor] = None,
tgt_key_padding_mask: Optional[Tensor] = None,
memory_key_padding_mask: Optional[Tensor] = None,
pos: Optional[Tensor] = None,
refpoints_unsigmoid: Optional[Tensor] = None, # num_queries, bs, 2
):
output = tgt
intermediate = []
reference_points = refpoints_unsigmoid.sigmoid() # refpoints_unsigmoid是通过nn.Embedding(num_queries, query_dim)进行的初始化,其中query_dim
ref_points = [reference_points]
# import ipdb; ipdb.set_trace()
for layer_id, layer in enumerate(self.layers):
obj_center = reference_points[..., :self.query_dim] # [num_queries, batch_size, 2]
# get sine embedding for the query vector
query_sine_embed = gen_sineembed_for_position(obj_center, self.d_model)
query_pos = self.ref_point_head(query_sine_embed)
# For the first decoder layer, we do not apply transformation over p_s
if self.query_scale_type != 'fix_elewise':
if layer_id == 0:
pos_transformation = 1
else:
pos_transformation = self.query_scale(output)
else:
pos_transformation = self.query_scale.weight[layer_id]
# apply transformation
query_sine_embed = query_sine_embed[...,:self.d_model] * pos_transformation
# modulated HW attentions
if self.modulate_hw_attn:
refHW_cond = self.ref_anchor_head(output).sigmoid() # nq, bs, 2, 使用decoder embedding对长宽进行修正
query_sine_embed[..., self.d_model // 2:] *= (refHW_cond[..., 0] / obj_center[..., 2]).unsqueeze(-1)
query_sine_embed[..., :self.d_model // 2] *= (refHW_cond[..., 1] / obj_center[..., 3]).unsqueeze(-1)
output = layer(output, memory, tgt_mask=tgt_mask,
memory_mask=memory_mask,
tgt_key_padding_mask=tgt_key_padding_mask,
memory_key_padding_mask=memory_key_padding_mask,
pos=pos, query_pos=query_pos, query_sine_embed=query_sine_embed,
is_first=(layer_id == 0))
# iter update
if self.bbox_embed is not None:
if self.bbox_embed_diff_each_layer: # 不同层之前的bbox_embed是否相同
tmp = self.bbox_embed[layer_id](output)
else:
tmp = self.bbox_embed(output)
# import ipdb; ipdb.set_trace()
tmp[..., :self.query_dim] += inverse_sigmoid(reference_points) # 使用bbox_embed从output中输出bounding box的修正量
new_reference_points = tmp[..., :self.query_dim].sigmoid() # 修正完后进行归一化
if layer_id != self.num_layers - 1: # 最后一层不需要修正
ref_points.append(new_reference_points)
reference_points = new_reference_points.detach()
if self.return_intermediate:
intermediate.append(self.norm(output))
if self.norm is not None:
output = self.norm(output)
if self.return_intermediate:
intermediate.pop()
intermediate.append(output)
if self.return_intermediate:
if self.bbox_embed is not None:
return [
torch.stack(intermediate).transpose(1, 2),
torch.stack(ref_points).transpose(1, 2),
]
else:
return [
torch.stack(intermediate).transpose(1, 2),
reference_points.unsqueeze(0).transpose(1, 2)
]
return output.unsqueeze(0)
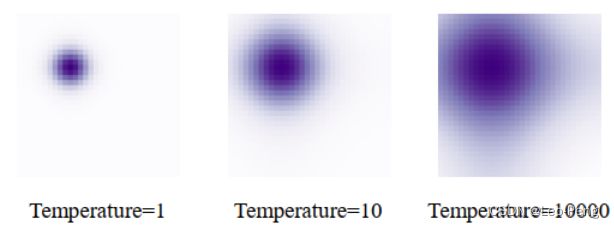
在上述代码中,在gen_sineembed_for_position中有个超参数10000,这个10000对应论文中的参数temperate,对于位置编码,我们使用的是正弦函数: PE ( x ) 2 i = sin ( x T 2 i / D ) , PE ( x ) 2 i + 1 = cos ( x T 2 i / D ) , \operatorname{PE}(x)_{2 i}=\sin \left(\frac{x}{T^{2 i / D}}\right), \quad \operatorname{PE}(x)_{2 i+1}=\cos \left(\frac{x}{T^{2 i / D}}\right), PE(x)2i=sin(T2i/Dx),PE(x)2i+1=cos(T2i/Dx),其中, T T T就是超参数temperate,在自然语言处理中 T T T被硬编码为10000, x x x为整数表示每个单词在句子中的位置,然而在DETR中, x x x在 0 0 0和 1 1 1之间浮动,代表bounding box的位置,因此对于DETR来说, T T T应该进行调整,在DINO中将 T T T设置为了20, T T T越大我们可以理解为不同位置,位置编码区别越小,对应的注意力图会越平坦,如下图所示:
可以看到,代码上的修改并不大,相对于Conditional DETR主要是Cross Attention的过程中加入了长宽对Position Similarity的影响,并在Cross Attention的输出中对Anchor Box的四个参数进行显示的修正。从最后结果看,DAB DETR相对于Conditional DETR在收敛速度和精度上都有提升,如下图所示: