- ARM驱动学习之基础小知识
JT灬新一
ARM嵌入式arm开发学习
ARM驱动学习之基础小知识•sch原理图工程师工作内容–方案–元器件选型–采购(能不能买到,价格)–原理图(涉及到稳定性)•layout画板工程师–layout(封装、布局,布线,log)(涉及到稳定性)–焊接的一部分工作(调试阶段板子的焊接)•驱动工程师–驱动,原理图,layout三部分的交集容易发生矛盾•PCB研发流程介绍–方案,原理图(网表)–layout工程师(gerber文件)–PCB板
- MongoDB知识概括
GeorgeLin98
持久层mongodb
MongoDB知识概括MongoDB相关概念单机部署基本常用命令索引-IndexSpirngDataMongoDB集成副本集分片集群安全认证MongoDB相关概念业务应用场景:传统的关系型数据库(如MySQL),在数据操作的“三高”需求以及应对Web2.0的网站需求面前,显得力不从心。解释:“三高”需求:①Highperformance-对数据库高并发读写的需求。②HugeStorage-对海量数
- python爬取微信小程序数据,python爬取小程序数据
2301_81900439
前端
大家好,小编来为大家解答以下问题,python爬取微信小程序数据,python爬取小程序数据,现在让我们一起来看看吧!Python爬虫系列之微信小程序实战基于Scrapy爬虫框架实现对微信小程序数据的爬取首先,你得需要安装抓包工具,这里推荐使用Charles,至于怎么使用后期有时间我会出一个事例最重要的步骤之一就是分析接口,理清楚每一个接口功能,然后连接起来形成接口串思路,再通过Spider的回调
- APQP,ASPICE,敏捷,功能安全,预期安全,这些汽车行业的一堆标准
二大宝贝
安全架构
前言APQP,ASPICE,敏捷,功能安全,预期安全,PMP,PRICE2汽车行业的有这样一堆标准。我是半路出家来到汽车行业做项目经理的,对几个标准的感觉是,看了文档和各种解析之后还是一头雾水,不知道到底说了个啥,别人问我还是一脸懵逼。APQP(TS16949的最重要工具),ASPICE(软件)这些是质量标准,是优化整个公司体系的,但这套体系对项目管理有要求;敏捷,PMP这些是项目管理的标准;项目
- 探索ASPICE V3.1:汽车行业软件开发的中文指南
阮懿同
探索ASPICEV3.1:汽车行业软件开发的中文指南ASPICE_V3.1中文版.pdf.zip项目地址:https://gitcode.com/open-source-toolkit/422a2在汽车软件工程领域,高质量的标准对于确保行车安全和提升用户体验至关重要。今天,我们为您介绍一个珍贵的开源宝藏——ASPICEV3.1中文版资源。这是一篇专为国内汽车行业开发者、质量管理者准备的深度解读,旨
- sunxi-fel 的相关命令
蓝黑墨水
单片机
文章目录简介常用命令说明获取flash的相关信息列出所有的FEL设备显示BROM信息烧写程序到内存烧写程序到flash简介这个命令是全志芯片的烧写程序。有很多写法。例如:F1C100S、F1C200S这个命令有很多隐藏的相关问题(这里不讨论)常用命令说明获取flash的相关信息$./sunxi-fel.exe-pspiflash-infoManufacturer:Winbond(EFh),mode
- SPI机制
我们仍未知道那天所看见的猫的名
1、SPI机制:ServiceProviderInterface:服务提供发现机制,类型IOCJavaSPI实现:ServiceLoader定义接口A;实现接口A的实现类,B和C;在/META-INF/services/下创建文件,文件名为A类的全名称,内容为B和C的类全名调用:ServiceLoaderload=ServiceLoader.load(A.class);Interatori=loa
- 小米嵌入式面试题目RTOS面试题目 嵌入式面试题目
好家伙VCC
面试杂谈杂谈面试职场和发展
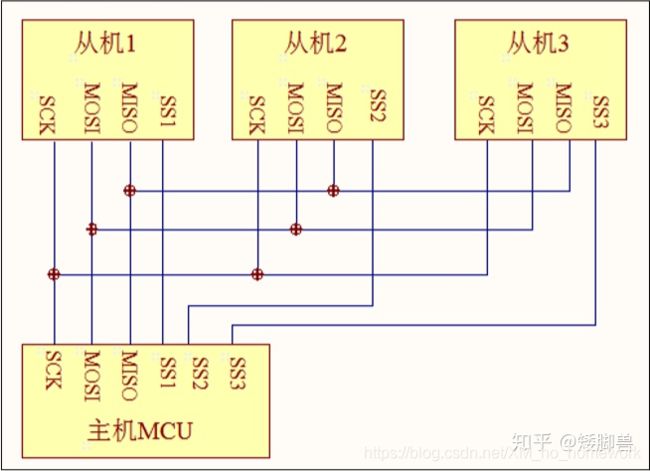
第一章-非RTOSbootloader工作流程MCU启动流程通信协议,SPIIICMCU怎么选型,STM32F1和F4有什么区别外部RAM和内部RAM区别,怎么分配外部总线和内部总线区别MCU上的固件,数据是怎么分配的MCU启动流程IAP是怎么升级的,突然断电怎么办挑了麦轮项目(因为大疆RM也是麦轮,面试官看样子比较感兴趣)为什么用的CAN总线你说一下spi和i2c和UART的各自的工作方式优缺点
- Linux使用mjpg-streamer进行图像传输
—你的鼬先生
Linux驱动linux树莓派图像传输
图像传输是一项在Linux操作系统中比较常见的一个操作,在视频图传时,一般是采用MJPG-streamer来进行图像传输,本文就以树莓派为例子,来示范一个图像传输。1.树莓派的摄像头激活首先更新树莓派sudoapt-getupdatesudoapt-getupgrade随后打开树莓派的配置界面,选择InterfaceOptionsudoraspi-config在InterfaceOption选择C
- 基于STM32F103C8T6定时器的PWM通道的重映射
—你的鼬先生
stm32嵌入式硬件单片机
在我们平时的的使用中,我们最常使用的是TIM2和TIM3的PWM通道,但是由于C8T6的IO口有限,所以可能会出现PWM通道的资源不够的情况,从而我们可能会使用PWM4的PWM通道,但是TIM4的PWM通道并不能直接使用,它需要进行一个重映射,不然可能会导致PWM波不能正常发送。以下就是对PWM4的PWM通道进行一个重映射#include"stm32f10x.h"//Deviceheadervoi
- python图片匹配
给麦兜吃芒果
pythonpython
#方法一,可以直接用importpyautogui,timeclassPic():def__init__(self):passself.w,self.h=pyautogui.size()defget_win(self,number_x=32,number_y=24):#读取页面,记录rgb数据tx=int(self.w/number_x)ty=int(self.h/number_y)img=pya
- 【STM32系统】基于STM32设计的锂电池电量/电压检测报警器系统——文末完整资料下载(程序源码/电路原理图/电路PCB/设计文档/模块资料/元器件清单/实物图/答辩问题技巧/PPT模版等)
阿齐Archie
单片机嵌入式项目stm32嵌入式硬件单片机
基于STM32设计的锂电池电量/电压检测报警器系统系统视频:摘要:本设计旨在研究一个基于STM32F103C8T6微控制器的锂电池电量/电压检测报警器系统,应用于便携式电子设备电池管理。系统通过STM32的ADC模块对锂电池电压进行采集,利用LCD1602显示模块实时显示电池电压,当检测到电池电量不足或电压异常时,蜂鸣器报警模块会发出警报提醒用户。系统采用简单的硬件结构和优化的软件架构,通过对实际
- 使用STM32实现简单的智能温控系统
棂梓知识
stm32单片机嵌入式硬件
智能温控系统是一种能够根据环境温度实时调整设备的工作状态的系统。在本篇文章中,我们将使用STM32微控制器来实现一个简单的智能温控系统。该系统将会有以下功能:实时监测环境温度,并显示在LCD屏幕上。当环境温度超过设定的阈值时,自动开启风扇。当环境温度恢复正常时,自动关闭风扇。通过按键模拟调节设定的阈值。系统设计首先,我们需要准备一些硬件设备。具体而言,我们需要以下组件:STM32F103C8T6开
- quartus pin 分配(三)
落雨无风
IC设计fpgafpga开发
quartuspin分配如有需要,可查看quartusUI界面sdc配置(二)上次文章中,说了自己写sdc需要配置的分类点,这次将介绍管脚分配。已打开Quartus软件,导入设计,写好约束下一步,在Quartus软件的菜单栏打开Assignments中的二级菜单PinPlanner打开改界面即可看到选中的fpga型号,管脚图,封装类型等信息。在打开的界面中,大致可分为上下两个部分。上半部分,可分为
- 通过C# 裁剪PDF页面
Eiceblue
C#.NETPDFc#pdf开发语言visualstudio
在处理PDF文档时,有时需要精确地裁剪页面以适应特定需求,比如去除广告、背景信息或者仅仅是为了简化文档内容。本文将指导如何使用免费.NET控件通过C#实现裁剪PDF页面。免费库FreeSpire.PDFfor.NET支持在.NET(C#,VB.NET,ASP.NET,.NETCore)程序中实现创建、操作、转换和打印PDF文档等操作。可以从以下链接下载产品包后手动添加引用,或者直接通过NuGet安
- python 多线程抓取xunlei磁力下载链接
weixin_53748624
pythonpycharm
importurllib.requestimportreimporttimeimportthreadingclassSpider(object):def__init__(self):#定义字典,用于保存影片信息self.films_dict={}self.i=1self.lock1=threading.Lock()defstart(self):#调用下载函数,获取下载连接forpageinrang
- python做窗口软件界面绑定py程序_PyCharm GUI界面开发和exe文件生成的实现
weixin_39948442
一、安装Python二、安装PyQt5推荐使用pip安装:win+R调出cmd命令窗口pipinstallPyQt5等待片刻,继续安装PyQt5-toolspipinstallPyQt5-tools如果直接pip不成功的话,建议在python库这个网站上搜索相关库,下载相应的.whl文件,然后用以下方法进行安装:①pipwhl文件所在路径whl文件名②在cmd命令窗口先执行cdwhl文件所在路径到
- 计算PCB设计中SMD焊盘尺寸的最佳方法
David WangYang
硬件工程
SMD元件需要精确尺寸的焊盘以便在组装过程中进行焊接。PCB设计师仍然需要使用数据表中的信息以及通用的焊盘和焊地尺寸公式来创建许多自己的封装。设计师负责确保焊盘尺寸正确,要么通过计算并与封装数据进行比较,查阅数据表,要么通过记住SMD焊盘尺寸标准。如果你有一个元件,但你没有访问到封装,而你决定自己构建封装,有哪些资源可以确保你拥有正确的焊盘尺寸?计算SMD焊盘尺寸对于SMD组件,确定焊盘尺寸有几种
- 分布式框架Celery七(Django-Celery-Flower实现异步和定时爬虫及其监控邮件告警)
yjjpp2301
Celery分布式djangopython后端
Django中集成方式安装模块pipinstallDjango==3.2.22pipinstallcelerypipinstallredispipinstalleventlet#在windows环境下需要安装eventlet包-----------pipinstalldjango-celery-beatpipinstalldjango-celery-resultspipinstalldjango-
- C/C++应避免的一些坑和问题
梓默
#Cc++c语言c#
#defineSPI_BUFFER_SIZE4*1024for(uint16_ti=0;i<(Size/SPI_BUFFER_SIZE);i++)//由于宏定义是直接替换,所以i<(Size/SPI_BUFFER_SIZE)实际是i<(Size/4*1024)//*/是同级运算//后者往往不是我们想要的结果为了避免这种情况最好宏定义时最好不带运算符或者加上括号#defineSPI_BUFFER_S
- pcb 受潮_在PCB设计中如何正确的处理潮湿敏感性元件
小timtim
pcb受潮
在PCB设计中如何处理潮湿敏感性元件涉及塑料集成电路(IC)潮湿敏感性的情况渐渐地变得越来越坏,这是由于许多工业趋势所造成的,其中包括对用来支持关键通信和技术应用的更高可靠性产品的不断寻求。单单潮湿敏感性元件(MSD,moisture-sensitivedevice)的失效率已经是处在一个不可忍受的水平,再加上封装技术的不断变化。更短的开发周期、不断缩小的尺寸、新的材料和更大的芯片正造成MSD数量
- PCB知识
G_G_
ADpcb工艺
PCB的相关知识PCB(PrintedCircuitBoard,印刷电路板)是一种用于支持和连接电子组件的基板。它是由一层或多层的导电层(通常是铜)和绝缘层(通常是环氧树脂)组成的。PCB在电子设备中起到了电气连接、机械支撑和热传导的作用。以下是PCB的一些相关知识:PCB的结构:PCB通常由以下几层组成:导电层:通常是铜箔,用于传导电流和信号。绝缘层:通常是环氧树脂或聚酰亚胺等材料,用于隔离导电
- Boot header格式描述详细信息。CSU DMA用于数据传输。安全流开关允许数据移动。PL配置通过PCAP接口。PL bit流包含设备配置数据。
行者..................
FPGA
在Bootheader中的一些重要字段包括:-Reservedforinterrupts:用于存储中断相关信息,特别是在LQSPI地址空间中的默认0x01F中断向量被更改时,在XIP启动模式下使用。-Quad-SPI宽度检测:用于描述Quad-SPI宽度的字段。-加密状态:用于标识AES密钥来源,包括不加密、红密钥、黑密钥等。-FSBL执行地址:FSBL执行的起始地址。-源偏移:PMUFW和FSB
- 9月12日云技术研讨会 | ECU电控软件开发及测试全流程解决方案
经纬恒润
ECU电子电气架构软件开发与测试
“软件定义汽车”时代洪流下,电子电气架构往集中式发展已是大势所趋,控制器功能呈现出集中化、复杂化的特点,基于AutoSar架构开发复杂软件已成为行业共识。再加上ASPICE、ISO26262等过程体系和法规标准的要求,如何开发符合AutoSar架构的应用软件、评估软件质量和性能、优化软件结构、验证压力场景下的ECU稳定性成为各厂商面临的新挑战。本次研讨会,经纬恒润将结合业务团队多年来在软件开发和测
- 讨论视频系统架构
Robin-LV
MVCJDBC
今天接到一个业务,领导让我搭建一个视频系统架构。架构采用MVC的模式这个大家都知道,技术采用Sping,hibernate3,数据层采用Sping提供的的jdbc模板。我知道要提供一些公共的的类和接口。还有一些封装好的方法。这个架构要考虑现在老系统的数据,等新系统完成要把数据导过去,还要考虑多平台融合的问题。由于我们公司有多套系统,领导想做底层统一以后好管理。现在晕晕的,请高手谈谈如何搭建一个好的
- Awesome TensorFlow
weixin_30594001
人工智能移动开发大数据
AwesomeTensorFlowAcuratedlistofawesomeTensorFlowexperiments,libraries,andprojects.Inspiredbyawesome-machine-learning.WhatisTensorFlow?TensorFlowisanopensourcesoftwarelibraryfornumericalcomputationusin
- 将json型字符串转换为List<Map>的格式处理
ZJJG4
前后端交互
将json型字符串转换为List>的格式处理1、前台拼接字符串//保存事件$("#btn_save").on("click",(function(e){varpcbh=$("#sel_pcbh").val();varsqargs={list:[]};$("#clgltabletr:not(':first,:last')").each(function(i){varsqjson={};sqjson.
- dubbo spi 原理分析
DEARM LINER
dubbospringjavaspringboot后端
文章目录前言一、加载固定的扩展类1、ExtensionLoader.getExtension2、createExtension3、getExtensionClasses4、loadExtensionClasses5、cacheDefaultExtensionName6、loadDirectory7、loadResource8、loadClass二、加载自适应扩展类1、ExtensionLoader
- 15-HDMI TVS管SPICE仿真及性能分析
芯片SIPI设计
单片机嵌入式硬件
TVS二极管参数选取1)确定被保护电路最大直流或连续工作电压、电路的额定标准电压和高端容限。2)TVS额定反向关断Vwm应大于或等于被保护电路的最大工作电压。若选用的Vwm太低,器件可能进入雪崩或因反向漏电流太大影响电路的正常工作。串行连接分电压,并行连接分电流。3)TVS的最大筘位电压咋应小于被保护电路的损坏电压。4)在规定的脉冲持续时间内,TvS的最大峰值脉冲功耗R必须大于被保护电路内可能出现
- Python 多线程访问数据库正确使用dbutils PooledDB数据库连接池
weixin_41934979
数据库pythonDBUtilsPooledDB
1.安装DBUtilspipinstallDBUtils2.db_helper.py的代码如下importpymysqlfromdbutils.pooled_dbimportPooledDBfromconfigimportconfigclassDBHelper:def__init__(self):""":parammincached:连接池中空闲连接的初始数量:parammaxcached:连接池
- mysql主从数据同步
林鹤霄
mysql主从数据同步
配置mysql5.5主从服务器(转)
教程开始:一、安装MySQL
说明:在两台MySQL服务器192.168.21.169和192.168.21.168上分别进行如下操作,安装MySQL 5.5.22
二、配置MySQL主服务器(192.168.21.169)mysql -uroot -p &nb
- oracle学习笔记
caoyong
oracle
1、ORACLE的安装
a>、ORACLE的版本
8i,9i : i是internet
10g,11g : grid (网格)
12c : cloud (云计算)
b>、10g不支持win7
&
- 数据库,SQL零基础入门
天子之骄
sql数据库入门基本术语
数据库,SQL零基础入门
做网站肯定离不开数据库,本人之前没怎么具体接触SQL,这几天起早贪黑得各种入门,恶补脑洞。一些具体的知识点,可以让小白不再迷茫的术语,拿来与大家分享。
数据库,永久数据的一个或多个大型结构化集合,通常与更新和查询数据的软件相关
- pom.xml
一炮送你回车库
pom.xml
1、一级元素dependencies是可以被子项目继承的
2、一级元素dependencyManagement是定义该项目群里jar包版本号的,通常和一级元素properties一起使用,既然有继承,也肯定有一级元素modules来定义子元素
3、父项目里的一级元素<modules>
<module>lcas-admin-war</module>
<
- sql查地区省市县
3213213333332132
sqlmysql
-- db_yhm_city
SELECT * FROM db_yhm_city WHERE class_parent_id = 1 -- 海南 class_id = 9 港、奥、台 class_id = 33、34、35
SELECT * FROM db_yhm_city WHERE class_parent_id =169
SELECT d1.cla
- 关于监听器那些让人头疼的事
宝剑锋梅花香
画图板监听器鼠标监听器
本人初学JAVA,对于界面开发我只能说有点蛋疼,用JAVA来做界面的话确实需要一定的耐心(不使用插件,就算使用插件的话也没好多少)既然Java提供了界面开发,老师又要求做,只能硬着头皮上啦。但是监听器还真是个难懂的地方,我是上了几次课才略微搞懂了些。
- JAVA的遍历MAP
darkranger
map
Java Map遍历方式的选择
1. 阐述
对于Java中Map的遍历方式,很多文章都推荐使用entrySet,认为其比keySet的效率高很多。理由是:entrySet方法一次拿到所有key和value的集合;而keySet拿到的只是key的集合,针对每个key,都要去Map中额外查找一次value,从而降低了总体效率。那么实际情况如何呢?
为了解遍历性能的真实差距,包括在遍历ke
- POJ 2312 Battle City 优先多列+bfs
aijuans
搜索
来源:http://poj.org/problem?id=2312
题意:题目背景就是小时候玩的坦克大战,求从起点到终点最少需要多少步。已知S和R是不能走得,E是空的,可以走,B是砖,只有打掉后才可以通过。
思路:很容易看出来这是一道广搜的题目,但是因为走E和走B所需要的时间不一样,因此不能用普通的队列存点。因为对于走B来说,要先打掉砖才能通过,所以我们可以理解为走B需要两步,而走E是指需要1
- Hibernate与Jpa的关系,终于弄懂
avords
javaHibernate数据库jpa
我知道Jpa是一种规范,而Hibernate是它的一种实现。除了Hibernate,还有EclipseLink(曾经的toplink),OpenJPA等可供选择,所以使用Jpa的一个好处是,可以更换实现而不必改动太多代码。
在play中定义Model时,使用的是jpa的annotations,比如javax.persistence.Entity, Table, Column, OneToMany
- 酸爽的console.log
bee1314
console
在前端的开发中,console.log那是开发必备啊,简直直观。通过写小函数,组合大功能。更容易测试。但是在打版本时,就要删除console.log,打完版本进入开发状态又要添加,真不够爽。重复劳动太多。所以可以做些简单地封装,方便开发和上线。
/**
* log.js hufeng
* The safe wrapper for `console.xxx` functions
*
- 哈佛教授:穷人和过于忙碌的人有一个共同思维特质
bijian1013
时间管理励志人生穷人过于忙碌
一个跨学科团队今年完成了一项对资源稀缺状况下人的思维方式的研究,结论是:穷人和过于忙碌的人有一个共同思维特质,即注意力被稀缺资源过分占据,引起认知和判断力的全面下降。这项研究是心理学、行为经济学和政策研究学者协作的典范。
这个研究源于穆来纳森对自己拖延症的憎恨。他7岁从印度移民美国,很快就如鱼得水,哈佛毕业
- other operate
征客丶
OSosx
一、Mac Finder 设置排序方式,预览栏 在显示-》查看显示选项中
二、有时预览显示时,卡死在那,有可能是一些临时文件夹被删除了,如:/private/tmp[有待验证]
--------------------------------------------------------------------
若有其他凝问或文中有错误,请及时向我指出,
我好及时改正,同时也让我们一
- 【Scala五】分析Spark源代码总结的Scala语法三
bit1129
scala
1. If语句作为表达式
val properties = if (jobIdToActiveJob.contains(jobId)) {
jobIdToActiveJob(stage.jobId).properties
} else {
// this stage will be assigned to "default" po
- ZooKeeper 入门
BlueSkator
中间件zk
ZooKeeper是一个高可用的分布式数据管理与系统协调框架。基于对Paxos算法的实现,使该框架保证了分布式环境中数据的强一致性,也正是基于这样的特性,使得ZooKeeper解决很多分布式问题。网上对ZK的应用场景也有不少介绍,本文将结合作者身边的项目例子,系统地对ZK的应用场景进行一个分门归类的介绍。
值得注意的是,ZK并非天生就是为这些应用场景设计的,都是后来众多开发者根据其框架的特性,利
- MySQL取得当前时间的函数是什么 格式化日期的函数是什么
BreakingBad
mysqlDate
取得当前时间用 now() 就行。
在数据库中格式化时间 用DATE_FORMA T(date, format) .
根据格式串format 格式化日期或日期和时间值date,返回结果串。
可用DATE_FORMAT( ) 来格式化DATE 或DATETIME 值,以便得到所希望的格式。根据format字符串格式化date值:
%S, %s 两位数字形式的秒( 00,01,
- 读《研磨设计模式》-代码笔记-组合模式
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.util.ArrayList;
import java.util.List;
abstract class Component {
public abstract void printStruct(Str
- 4_JAVA+Oracle面试题(有答案)
chenke
oracle
基础测试题
卷面上不能出现任何的涂写文字,所有的答案要求写在答题纸上,考卷不得带走。
选择题
1、 What will happen when you attempt to compile and run the following code? (3)
public class Static {
static {
int x = 5; // 在static内有效
}
st
- 新一代工作流系统设计目标
comsci
工作算法脚本
用户只需要给工作流系统制定若干个需求,流程系统根据需求,并结合事先输入的组织机构和权限结构,调用若干算法,在流程展示版面上面显示出系统自动生成的流程图,然后由用户根据实际情况对该流程图进行微调,直到满意为止,流程在运行过程中,系统和用户可以根据情况对流程进行实时的调整,包括拓扑结构的调整,权限的调整,内置脚本的调整。。。。。
在这个设计中,最难的地方是系统根据什么来生成流
- oracle 行链接与行迁移
daizj
oracle行迁移
表里的一行对于一个数据块太大的情况有二种(一行在一个数据块里放不下)
第一种情况:
INSERT的时候,INSERT时候行的大小就超一个块的大小。Oracle把这行的数据存储在一连串的数据块里(Oracle Stores the data for the row in a chain of data blocks),这种情况称为行链接(Row Chain),一般不可避免(除非使用更大的数据
- [JShop]开源电子商务系统jshop的系统缓存实现
dinguangx
jshop电子商务
前言
jeeshop中通过SystemManager管理了大量的缓存数据,来提升系统的性能,但这些缓存数据全部都是存放于内存中的,无法满足特定场景的数据更新(如集群环境)。JShop对jeeshop的缓存机制进行了扩展,提供CacheProvider来辅助SystemManager管理这些缓存数据,通过CacheProvider,可以把缓存存放在内存,ehcache,redis,memcache
- 初三全学年难记忆单词
dcj3sjt126com
englishword
several 儿子;若干
shelf 架子
knowledge 知识;学问
librarian 图书管理员
abroad 到国外,在国外
surf 冲浪
wave 浪;波浪
twice 两次;两倍
describe 描写;叙述
especially 特别;尤其
attract 吸引
prize 奖品;奖赏
competition 比赛;竞争
event 大事;事件
O
- sphinx实践
dcj3sjt126com
sphinx
安装参考地址:http://briansnelson.com/How_to_install_Sphinx_on_Centos_Server
yum install sphinx
如果失败的话使用下面的方式安装
wget http://sphinxsearch.com/files/sphinx-2.2.9-1.rhel6.x86_64.rpm
yum loca
- JPA之JPQL(三)
frank1234
ormjpaJPQL
1 什么是JPQL
JPQL是Java Persistence Query Language的简称,可以看成是JPA中的HQL, JPQL支持各种复杂查询。
2 检索单个对象
@Test
public void querySingleObject1() {
Query query = em.createQuery("sele
- Remove Duplicates from Sorted Array II
hcx2013
remove
Follow up for "Remove Duplicates":What if duplicates are allowed at most twice?
For example,Given sorted array nums = [1,1,1,2,2,3],
Your function should return length
- Spring4新特性——Groovy Bean定义DSL
jinnianshilongnian
spring 4
Spring4新特性——泛型限定式依赖注入
Spring4新特性——核心容器的其他改进
Spring4新特性——Web开发的增强
Spring4新特性——集成Bean Validation 1.1(JSR-349)到SpringMVC
Spring4新特性——Groovy Bean定义DSL
Spring4新特性——更好的Java泛型操作API
Spring4新
- CentOS安装Mysql5.5
liuxingguome
centos
CentOS下以RPM方式安装MySQL5.5
首先卸载系统自带Mysql:
yum remove mysql mysql-server mysql-libs compat-mysql51
rm -rf /var/lib/mysql
rm /etc/my.cnf
查看是否还有mysql软件:
rpm -qa|grep mysql
去http://dev.mysql.c
- 第14章 工具函数(下)
onestopweb
函数
index.html
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/
- POJ 1050
SaraWon
二维数组子矩阵最大和
POJ ACM第1050题的详细描述,请参照
http://acm.pku.edu.cn/JudgeOnline/problem?id=1050
题目意思:
给定包含有正负整型的二维数组,找出所有子矩阵的和的最大值。
如二维数组
0 -2 -7 0
9 2 -6 2
-4 1 -4 1
-1 8 0 -2
中和最大的子矩阵是
9 2
-4 1
-1 8
且最大和是15
- [5]设计模式——单例模式
tsface
java单例设计模式虚拟机
单例模式:保证一个类仅有一个实例,并提供一个访问它的全局访问点
安全的单例模式:
/*
* @(#)Singleton.java 2014-8-1
*
* Copyright 2014 XXXX, Inc. All rights reserved.
*/
package com.fiberhome.singleton;
- Java8全新打造,英语学习supertool
yangshangchuan
javasuperword闭包java8函数式编程
superword是一个Java实现的英文单词分析软件,主要研究英语单词音近形似转化规律、前缀后缀规律、词之间的相似性规律等等。Clean code、Fluent style、Java8 feature: Lambdas, Streams and Functional-style Programming。
升学考试、工作求职、充电提高,都少不了英语的身影,英语对我们来说实在太重要