openCV教程(三)
文章目录
- 1 车辆统计项目
-
- 1.1 背景减除
- 1.2 车辆统计
- 2 特征点检测和匹配
-
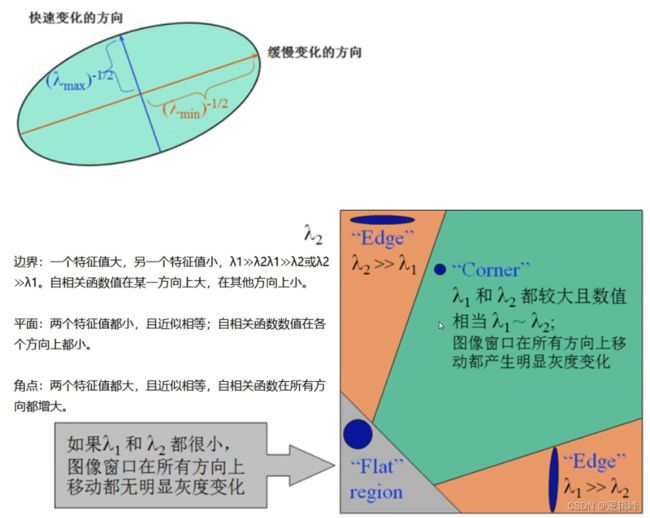
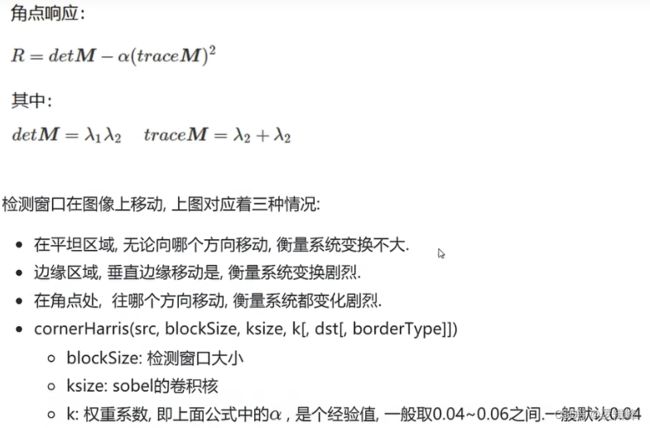
- 2.1 harris角点检测
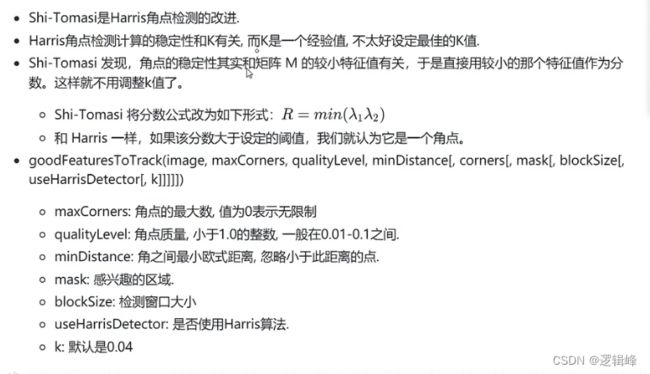
- 2.2 shi-tomasi角点检测
- 2.3 SIFT关键点检测
- 2.4 SURF特征检测
- 2.5 ORB特征检测
- 3 特征匹配
-
- 3.1 暴力特征匹配
- 3.2 FLANN特征匹配
- 3.3 图像查找
-
- 3.3.1 单应性矩阵
- 4 模版匹配
-
- 4.1 模版匹配
- 4.2 匹配多个对象
- 4.3 处理模版图片
- 4.4 数字模版处理和信用卡图片形态学操作
- 5 图像分割
-
- 5.1 分水岭法
- 5.2 GrabCut
- 5.3 MeanShift
- 6 图像修复
- 7 人脸检测
1 车辆统计项目
import cv2
import numpy as np
# 读取视频
cap = cv2.VideoCapture('./video/car.mp4')
# 循环读取视频每一帧
while True:
ret, frame = cap.read()
if ret:
cv2.imshow('video',frame)
key = cv2.waitKey(1)
# 用户按esc推出
if key == 27:
break
# 最后释放资源
cap.release()
# 关闭窗口
cv2.destroyAllWindows()
1.1 背景减除
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
bgs = cv2.bgsegm.createBackgroundSubtractorMOG()
while True:
ret, frame = cap.read()
if ret:
fgmask = bgs.apply(frame)
cv2.imshow('video', fgmask)
key = cv2.waitKey(1)
# ESC键
if key == 27:
break
cap.release()
cv2.destroyAllWindows()
1.2 车辆统计
import cv2
import numpy as np
# 读取视频
cap = cv2.VideoCapture('./video/car.mp4')
# 创建mog对象
mog = cv2.bgsegm.createBackgroundSubtractorMOG()
# 获取腐蚀卷积核
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
# 最大外接矩形的宽
min_w = 40
# 最大外接矩形的高
min_h = 30
# 线高
line_high = 630
# 车辆集合
cars = []
# 阈值
offset = 6
# 计数
car_num = 0
# 计算外接矩形的中心点
def center(x, y, w, h):
x1 = int(w / 2)
y1 = int(h / 2)
cx = int(x) + x1
cy = int(y) + y1
return cx, cy
# 循环读取视频每一帧
while True:
ret, frame = cap.read()
if ret:
# 把原始帧进行灰度化,然后去噪
# # 灰度
gray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY)
# # 去噪
blur = cv2.GaussianBlur(gray, (3, 3), 5)
# 去背景
mask = mog.apply(blur)
# 腐蚀
erode = cv2.erode(mask, kernel, iterations=2)
# 膨胀2次
dialte = cv2.dilate(erode, kernel, iterations=2)
# 消除内部的小块
# 闭运算
close = cv2.morphologyEx(dialte, cv2.MORPH_CLOSE, kernel)
# cv2.imshow('video',dialte)
# cv2.imshow('close',close)
# 划线
cv2.line(frame, [10, line_high], [1270, line_high], [255, 0, 0], 2)
# 查找轮廓
contours, h = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 画出所有检测出来的轮廓
for contour in contours:
# 最大外接矩形
(x, y, w, h) = cv2.boundingRect(contour)
is_valid = (w >= min_w) and (h >= min_h)
if not is_valid:
continue
# 要求坐标点都是整数
cv2.rectangle(frame, (int(x), int(y)), (int(x + w), int(y + h)), (0, 0, 255), 2)
# 如何计数
# 把车抽象为一点,即外接矩形的中心点
# 通过外接矩形,计算车的中心点
cpoint = center(x, y, w, h)
# 将符合条件的车存入列表
cars.append(cpoint)
cv2.circle(frame, (cpoint), 5, (0, 0, 255), -1)
# 判断汽车是否过检测线
for (x, y) in cars:
if (line_high - offset) < y < (line_high + offset):
# 落入了有效区间
# 计数加一
car_num += 1
# 然后remove掉
cars.remove((x, y))
print(car_num)
# 添加字符串
cv2.putText(frame, 'Vechicle Count:' + str(car_num), [500, 60], cv2.FONT_HERSHEY_SIMPLEX, 2, [0, 0, 255], 5)
cv2.imshow('frame', frame)
key = cv2.waitKey(3)
# 用户按esc推出
if key == 27:
break
# 最后释放资源
cap.release()
# 关闭窗口
cv2.destroyAllWindows()
2 特征点检测和匹配
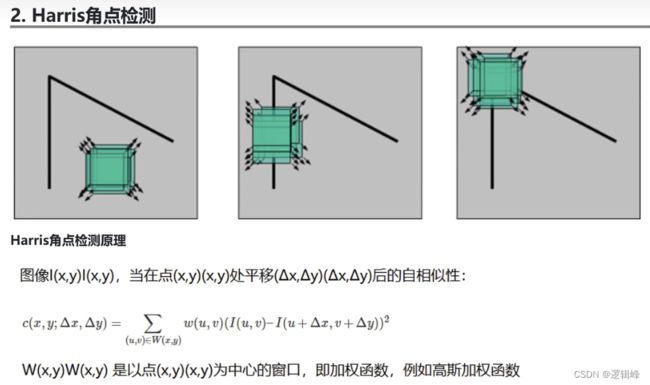
2.1 harris角点检测
import cv2
import numpy as np
img = cv2.imread('./image/dog.png')
# 变成灰度图片
gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
# harris角点检测
dst = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
#返回的东西叫做角点响应.每一个像素点都能计算出一个角点响应来#
print(dst)
print(dst.shape)#显示角点
#我们认为角点响应大于0.01倍的dst.max()就可以认为是角点了.
img[dst > 0.01* dst.max()]= [0,0,255]
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
2.2 shi-tomasi角点检测
import cv2
import numpy as np
#harris
# bLockSize = 2
# ksize = 3
# k = e.e4
# Shi-Tomasi
maxCorners = 1000
ql = 0.01
minDistance = 10
img = cv2.imread('./image/dog.png')
#灰度化
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
corners = cv2.goodFeaturesToTrack(gray,maxCorners,ql, minDistance)
corners = np.int16(corners)
#Shi-Tomasi绘制角点
for i in corners:
x,y = i.ravel()
cv2.circle(img,(x,y), 3,(255,0,0