8.AUTOSAR 诊断栈分析(一)
目录
1.错误分级分类
2.错误上报方法
2.1 API上报
2.2 预定义的Callout上报
2.3 DET(Default Error Tracer)相关Hook或者Callout上报
2.4 DEM相关错误处理
2.5 DLT相关错误处理
3.小结
终于来到了整个ECU的核心:诊断Dianostic。
为了更加系统地了解诊断,我将从错误分级分类、错误上报方法、诊断模块几个方面进行分析。
1.错误分级分类
根据AUTOSAR相关简介,在ECU系统级别的错误等级如下四类:
- 开发错误(Development Errors)
这种错误类型很常见,在开发期间用来定位软件bug;
例如某些模块没初始就开始使用、错误的数据长度等;
随着ECU的量产上车该类错误的检测机制需要关闭。
- 运行时错误(Runtime Errors)
该类错误属于比较严重的系统级软件错误,但是也是需要根据实际情况记录。
例如在运行过程中,收到的CAN报文突然丢掉了(Buffer里没数据了)。
- 瞬态故障错误(Transient Faults)
瞬态故障错误一般发生在硬件,这个我暂时还没有看到过。
- 产品错误(Production Errors)
这个很好理解了,就是定义的某些DTC,用于量产车日常的维修诊断使用。
那么上述错误从类型来看,又分为:
- 硬件失效/错误
例如Flash模拟EEPROM失效,不能写入等
- 软件错误
例如调用NvM_Write时输入了错误的地址信息等
- 系统错误
这个就不太好分辨,例如某报文接收超时,无法判断是软件还是硬件错误;故定义成系统错误,需要进一步处理。
2.错误上报方法
AUTOSAR定义了如下几种方法进行错误上报。
2.1 API上报
该方法是通过读取调用某个API后的返回值获得该API操作是否成功。这么说起来比较绕,还是具体示例:
Std_ReturnType Dem_ClearDTC (uint8 ClientId)如上,Std_ReturnType有两种返回值E_OK和E_NOT_OK,用于表示当前清除DTC的操作是否成功,用户根据返回接口去做对应的代码逻辑。
注意,这里要与我们调用DEM相关API设置DTC状态不一样的,下面会讲到。
2.2 预定义的Callout上报
当某个操作出现错误时设计一个callout,例如CAN报文接收timeout,此时通过callout上报。
2.3 DET(Default Error Tracer)相关Hook或者Callout上报
DET主要是上报开发错误和运行时错误。
这意味着,在开发阶段DET用于上报开发错误,量产阶段DET根据情况上报系统错误。所以以前我们常说上车后DET是需要关闭的这种说法不是非常准确。
该方式常见的机制有:
- 将错误信息写入ring buffer
- 将错误信息通过串口输出到外部logger
- 死循环等
提供的接口有:
Det_ReportError(uint16 ModuleId, uint8 InstanceId, uint8 ApiId, uint8 ErrorId)ModuleID:一般指AUTOSAR定义的基础软件模块ID
IntanceID:该模块的示例ID,例如CAN0\1\2
ApiID:对应模块的API ID
ErrorID:对应错误ID
2.4 DEM相关错误处理
DEM错误上报,就是大家平时接触的最多的错误处理地方时,用于上报主机厂定义的错误,通常是通过将错误事件写进memory、禁用某些ECU功能(FIM:Function Inhibition Manager)或者通知某些SW-C。
该模块提供的接口如下:
Dem_SetEventStatus(EventId, EventStatus)这块的事件管理会在后面详细说明。
2.5 DLT相关错误处理
DLT(Diagnostic Log and Trace)用于收集错误信息并转为标准格式,然后将数据传给PduR,经由PduR通过不同总线传输到PC或者记录仪。
该模块有如下功能:
- 提供标准接口用于记录SW-Cs、Det、Dem等模块提供的错误信息
- 结合RTE使用Trace
- 可以单独对log、trace信息进行使能
- Dlt在开发和量产阶段均可以使用
需要重点关注的是,量产阶段DLT的log和trace信息必须要信息安全机制保证。
常用API为:
Dlt_SendLogMessage(Dlt_SessionIDType session_id,
Dlt_MessageLogInfoType log_info,
uint8 *log_data,
uint16 log_data_length)DLT常见的使用方法如下:
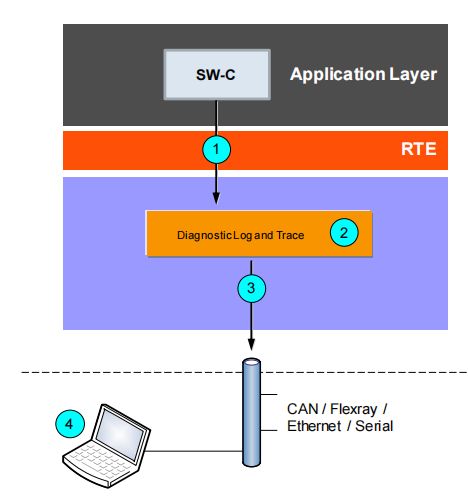
- SW-C生成一个log信息,并调用DLT标准接口将信息发送给DLT
- DLT模块通过DLT协议将数据转为标准格式;
- 通过PduR将数据传给目标总线
- 编码后的数据传给目标PC。
3.小结
通过上面简介,我们主要了解了在ECU层级下的错误分级分类、错误上报机制。
对故障处理,大家可能首先就想到了DEM和DET;
对于API这类虽说也在用,但是还没有上升到故障这种想法;
DLT就更不用说了,以前大家有打印log的习惯,但是没有一个统一的标准。
下面我们将详细聊DEM、DCM,有机会在聊聊DLT吧。