古月居ROS入门21讲学习笔记
目录
- 0、Ubuntu18.04 ROS安装:
- 一、基础语言
- 二、开发工具
- 三、基本概念
- 四、ROS基础知识
-
- 4.1 小海龟例子
- 4.2 常用的命令行工具
-
- 4.2.1 话题相关命令
- 4.2.2 服务相关命令
- 4.2.3 话题记录
- 4.3 创建工作空间与功能包
- 4.4 发布者Publisher的编程实现
- 4.5 订阅者Subscriber的编程实现
- 4.6 话题消息的定义与使用
- 4.7 客户端client的编程实现
- 4.8 服务端server的编程
- 4.9 服务数据的定义与使用
- 4.10 参数的使用与编程方法
- 4.11 ROS中的坐标系管理系统
- 4.12 tf坐标系广播与监听
- 4.13 launch启动文件的使用方法
- 4.14常用可视化工具的使用
- 4.15 资料学习
0、Ubuntu18.04 ROS安装:
链接:https://blog.csdn.net/weixin_45702256/article/details/109329644
一、基础语言
for循环:
c++:
#includepython:
for a in range(5,10):
if a<10:
print 'a= ',a
a +=1
else:
break
while循环:
python
a = 5
while a < 10:
print 'a = ' , a
a += 1
面向对象:
C++
#include python:
class A:
i = 10
def test(self)
print self.i
a = A()
a.test()
python:
class A:
i = 10
def test(self):
print self.i
a = A()
a.test()
a: c++代码首先要编译:c++_for.cpp
g++ c++_for.cpp -o c++_for
./c++_for
二、开发工具

三、基本概念
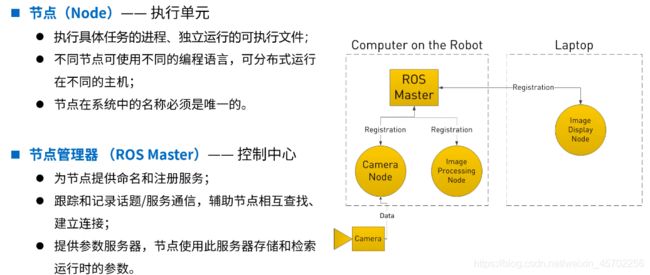


查看节点列表:rosnode list
发布话题消息:rostopic pub -r 10 /话题名
发布服务请求:rosservice call /服务文件 “变量:val”
话题记录: rosbag record -a -O fileName
话题复现: rosbag play fileName
四、ROS基础知识

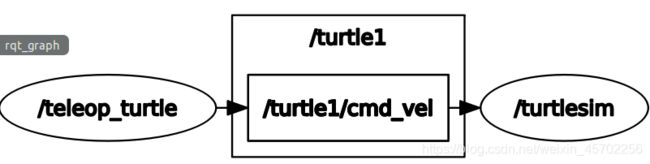
4.1 小海龟例子
1. **启动ROS Master** $ roscore
2. **启动小海龟仿真器** $ rosrun turtlesim turtlesim_node
3. **启动海龟控制节点** $ rosrun turtlesim turtle_teleop_key
命令:
#查看节点
$ rqt_graph
4.2 常用的命令行工具
4.2.1 话题相关命令
#1显示所有节点相关信息的指令
rosnode
# 2 列出系统所有节点
rosnode list
# 3 查看某一节点的具体信息
rosnode info /节点(turtlesim)
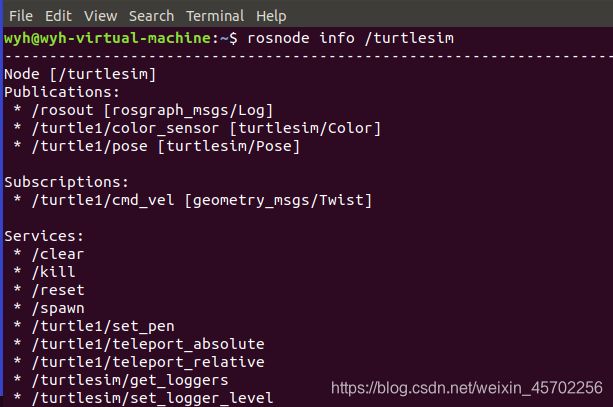 图片对应上述命令3,
图片对应上述命令3,
# 4 rostopic命令工具
rostopic
# 5 打印系统当前的话题列表
rostopic list
# 6 通过指令给话题发布指令让海龟动起来
#rostopic pub 话题名 话题消息类别 消息内容
# /turtle1/cmd_vel 话题名 geometry_msgs/Twist数据内容,消息结构
# "linear:.."消息数据结构的具体数据 linear线速度,angular角速度
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
# 6 pub只运行一次,所以需要在pub后加上 -r(频率) 10(一秒发布10次)
rostopic pub -r 10 /turtle1/cmd_vel .....

#7 显示数据结构
rosmsg show

4.2.2 服务相关命令
# 1 rosservice +要干的事的类型
rosservice list
# 2 再调用新的海龟 theta角度
rosservice call /spawn "x: 0.0
y: 0.0
theta: 0.0
name: ''"
# 3 运行后rostopic list 将包含turtle2的内容
4.2.3 话题记录
用于数据的保存和复现
# 1 话题记录
rosbag record -a -O cmd_record
# -a 将所有数据保存 -O保存成压缩包 cmd_压缩包名字
# 2 话题复现
rosbag play cmd_record
4.3 创建工作空间与功能包
创建工作空间
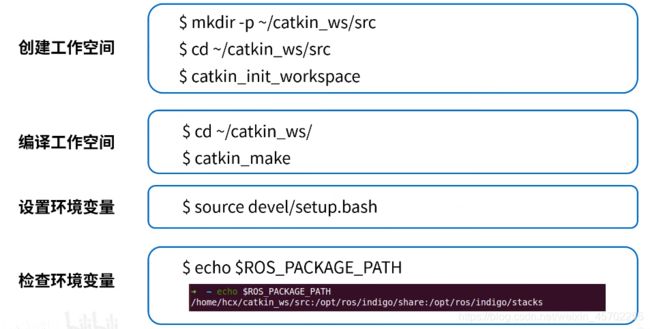
建立install空间:catkin_make install 输入catkin_make 出现make -j4 -l4 没有问题
 解析:
解析:
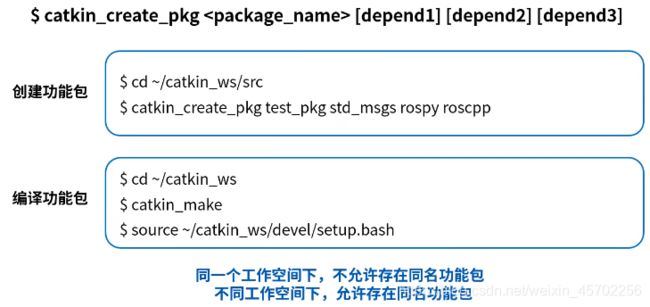
test_pkg 测试功能包 后面的依赖为用到的库(roscpp rospy std_msgs)c++、py、标准消息
这些包要建立在/home/wyh/catkin_ws/src/文件夹下
# 0 建立相关文件包
catkin_create_pkg test_pkg roscpp rospy std_msgs
# 1 c++程序
catkin_create_pkg roscpp rosp
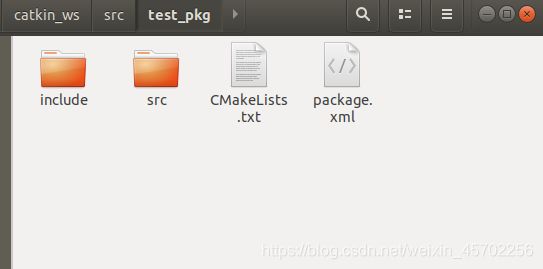 说明:src 文件夹下放置代码.py c++文件
说明:src 文件夹下放置代码.py c++文件
include放置头文件
cmakelists.txt 编译环境
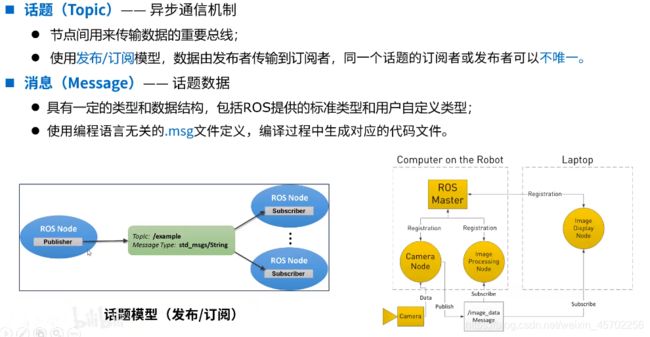
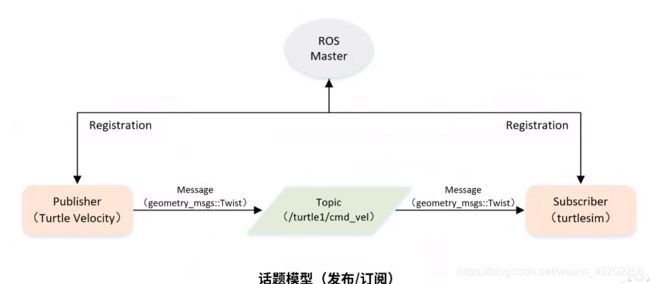
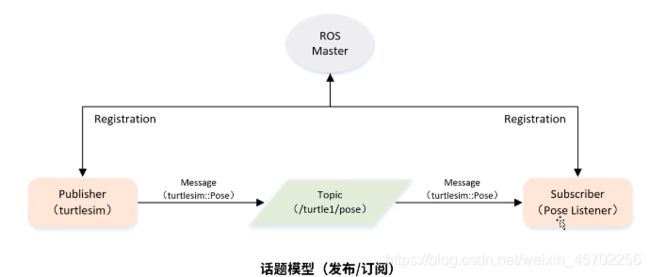
4.4 发布者Publisher的编程实现
话题模型
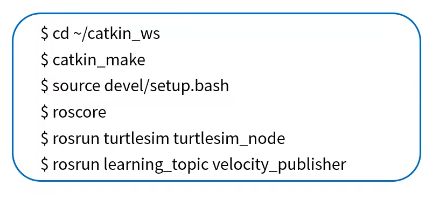
小海龟代码练习,建立文件功能包

catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim Created file learning_topic/package.xml

c++代码:
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include 
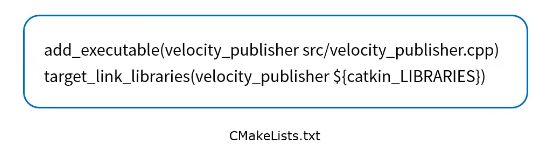
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
编译内容放置:将.cpp编译成前面命名的可视化文件,target_link_libraries跟所需要的库做链接

编译并运行:
python代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
4.5 订阅者Subscriber的编程实现

c++代码:
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include 编译:


add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
python代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS节点初始化
rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
pose_subscriber()
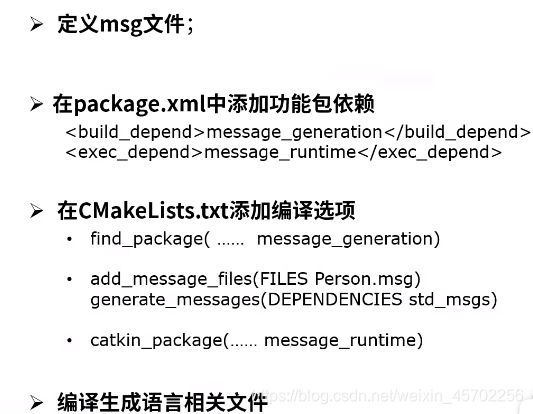
4.6 话题消息的定义与使用
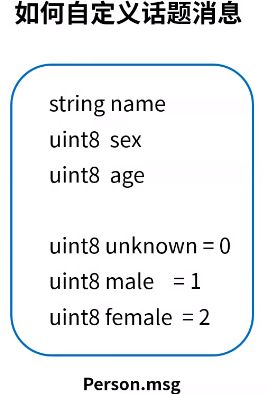
过程:1

2 packag.xml文件
3 .cmakelist文件:
message_generation

add_message_files(FILES Person.msg)
generation_messages(DEPENDENCIES std_msgs)
message_runtime

c++实现
person_publisher.cpp
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include person_subscriber.cpp
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 配置代码编译规则

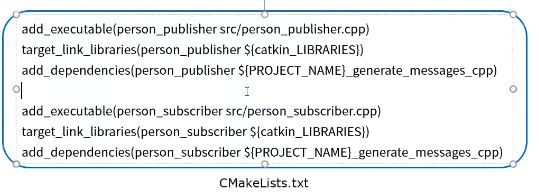
添加依赖项:
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)

python实现:
person_publisher.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def velocity_publisher():
# ROS节点初始化
rospy.init_node('person_publisher', anonymous=True)
# 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
person_info_pub = rospy.Publisher('/person_info', Person, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化learning_topic::Person类型的消息
person_msg = Person()
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = Person.male;
# 发布消息
person_info_pub.publish(person_msg)
rospy.loginfo("Publsh person message[%s, %d, %d]",
person_msg.name, person_msg.age, person_msg.sex)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
person_subscriber.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def personInfoCallback(msg):
rospy.loginfo("Subcribe Person Info: name:%s age:%d sex:%d",
msg.name, msg.age, msg.sex)
def person_subscriber():
# ROS节点初始化
rospy.init_node('person_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
rospy.Subscriber("/person_info", Person, personInfoCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
person_subscriber()
4.7 客户端client的编程实现
话题模型

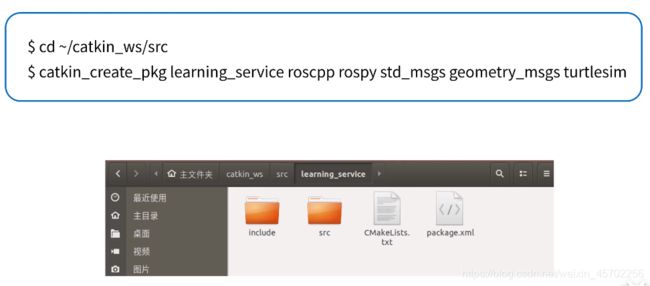
创建客户端代码
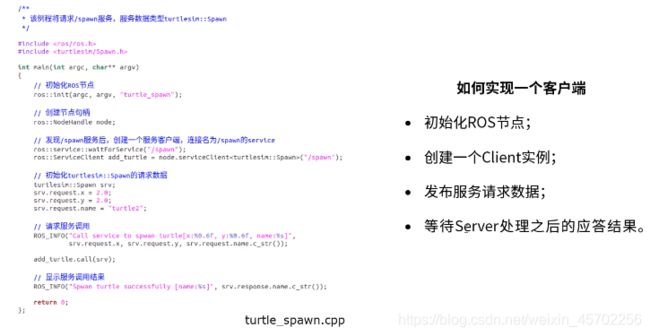
c++:
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include 

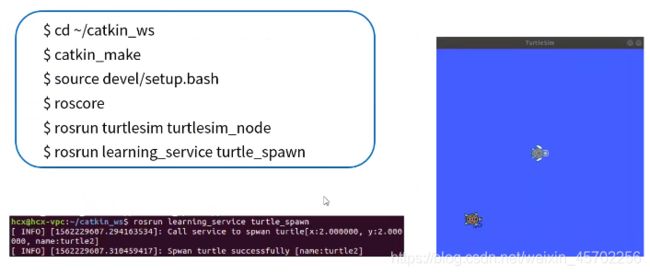
编译代码:
add_executable(turtle_spawn src/turtle_spawm.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
编译运行客户端
python代码实现:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():
# ROS节点初始化
rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/spawn')
try:
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
return response.name
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
#服务调用并显示调用结果
print "Spwan turtle successfully [name:%s]" %(turtle_spawn())
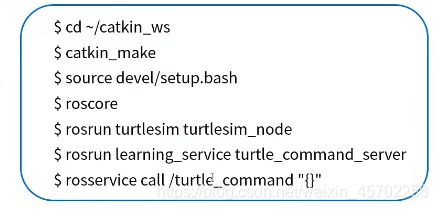
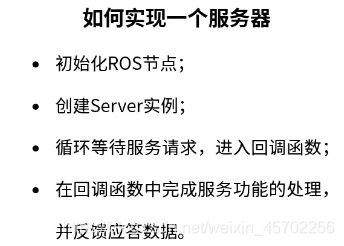
4.8 服务端server的编程

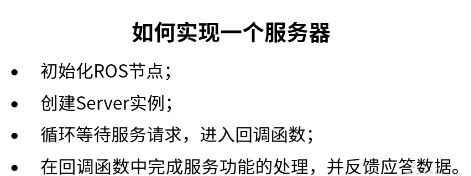
创建服务器代码
c++:turtle_command_server.cpp
/**
* 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
*/
#include 编译:cmakelists

add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})
编译并运行服务器
python实现:
turtle_command_server.cpp
- ros在Python中没有spinonce方法,可通过多线程来实现
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
import rospy
import thread,time
from geometry_msgs.msg import Twist
from std_srvs.srv import Trigger, TriggerResponse
pubCommand = False;
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
def command_thread():
while True:
if pubCommand:
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
turtle_vel_pub.publish(vel_msg)
time.sleep(0.1)
def commandCallback(req):
global pubCommand
pubCommand = bool(1-pubCommand)
# 显示请求数据
rospy.loginfo("Publish turtle velocity command![%d]", pubCommand)
# 反馈数据
return TriggerResponse(1, "Change turtle command state!")
def turtle_command_server():
# ROS节点初始化
rospy.init_node('turtle_command_server')
# 创建一个名为/turtle_command的server,注册回调函数commandCallback
s = rospy.Service('/turtle_command', Trigger, commandCallback)
# 循环等待回调函数
print "Ready to receive turtle command."
thread.start_new_thread(command_thread, ())
rospy.spin()
if __name__ == "__main__":
turtle_command_server()
4.9 服务数据的定义与使用


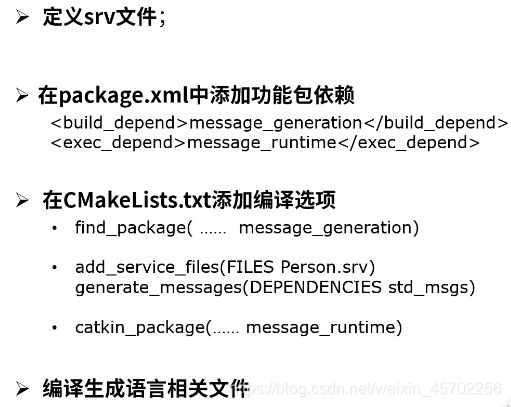
1 定义srv文件:/home/wyh/catkin_ws/src/learning_service/srv/Person.srv
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
---
string result
2 ![]()
代码:
<build_depend>message_generation</build_depend>
<exec_depend>message runtime</exec_depend>
3 在CMakeList.txt添加:


add_service_files(FILES Person.srv)
generate_messages(DEPENDENCIES std_msgs)

创建服务器代码:
c++:person_server.cpp
//服务端
/**
/ * 该例程将执行/show_person服务,服务数据类型learning_service::Person
*/
#include 客户端C++代码:person_client.cpp
/**
* 该例程将请求/show_person服务,服务数据类型learning_service::Person
*/
#include 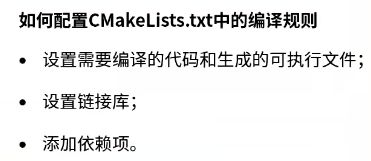
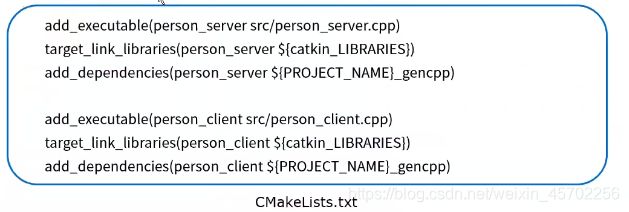
编译代码:
add_executable(person_server src/person_server.cpp)
target_link_libraries(person_server ${catkin_LIBRARIES})
add_dependencies(person_server ${PROJECT_NAME}_gencpp)
add_executable(person_client src/person_client.cpp)
target_link_libraries(person_client ${catkin_LIBRARIES})
add_dependencies(person_client ${PROJECT_NAME}_gencpp)
python代码:
服务器:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将执行/show_person服务,服务数据类型learning_service::Person
import rospy
from learning_service.srv import Person, PersonResponse
def personCallback(req):
# 显示请求数据
rospy.loginfo("Person: name:%s age:%d sex:%d", req.name, req.age, req.sex)
# 反馈数据
return PersonResponse("OK")
def person_server():
# ROS节点初始化
rospy.init_node('person_server')
# 创建一个名为/show_person的server,注册回调函数personCallback
s = rospy.Service('/show_person', Person, personCallback)
# 循环等待回调函数
print "Ready to show person informtion."
rospy.spin()
if __name__ == "__main__":
person_server()
客户端:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import sys
import rospy
from learning_service.srv import Person, PersonRequest
def person_client():
# ROS节点初始化
rospy.init_node('person_client')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/show_person')
try:
person_client = rospy.ServiceProxy('/show_person', Person)
# 请求服务调用,输入请求数据
response = person_client("Tom", 20, PersonRequest.male)
return response.result
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
#服务调用并显示调用结果
print "Show person result : %s" %(person_client())
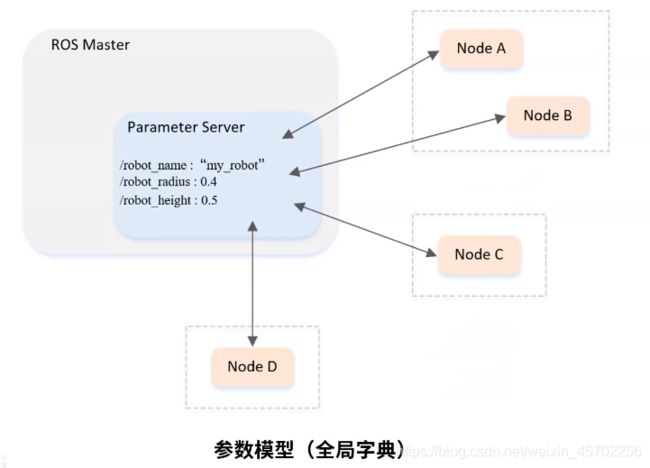
4.10 参数的使用与编程方法
参数模型
创建功能包

参数命令行使用

修改参数: rosparm set 参数 要改成的参数值
修改后的查询更新 : rosservice call /clear “{}”
编程方法:
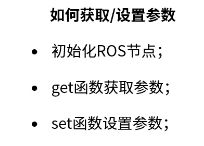
c++实现:parameter_config.cpp
/**
* 该例程设置/读取海龟例程中的参数
*/
#include 编译:

add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})
编译并运行

python代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():
# ROS节点初始化
rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数
red = rospy.get_param('/background_r')
green = rospy.get_param('/background_g')
blue = rospy.get_param('/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数
rospy.set_param("/background_r", 255);
rospy.set_param("/background_g", 255);
rospy.set_param("/background_b", 255);
rospy.loginfo("Set Backgroud Color[255, 255, 255]");
# 读取背景颜色参数
red = rospy.get_param('/background_r')
green = rospy.get_param('/background_g')
blue = rospy.get_param('/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
#发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/clear')
try:
clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据
response = clear_background()
return response
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
parameter_config()
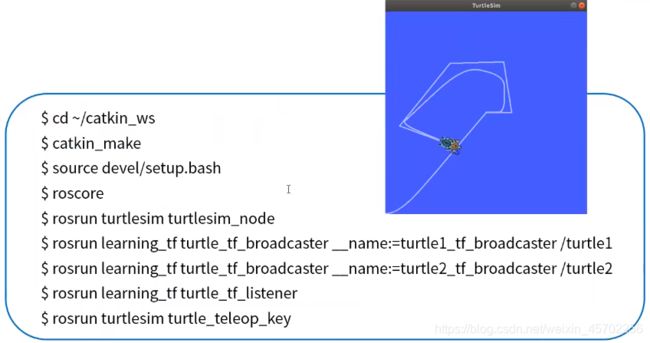
4.11 ROS中的坐标系管理系统
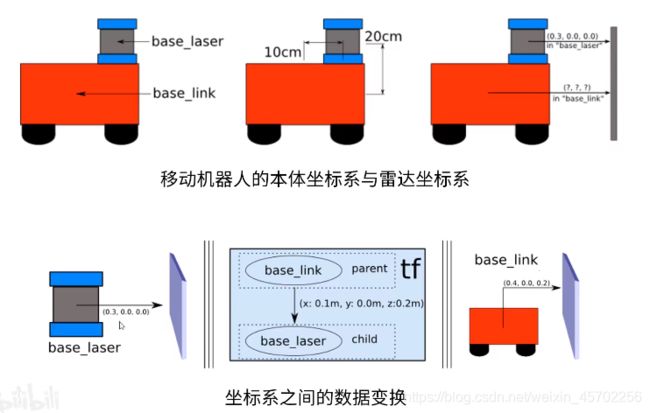
海龟案例:
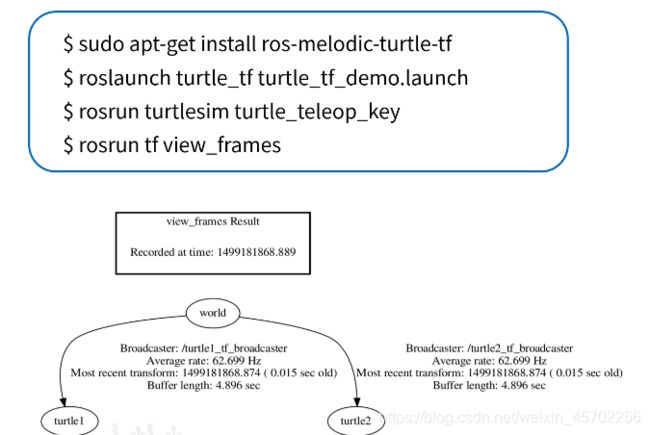

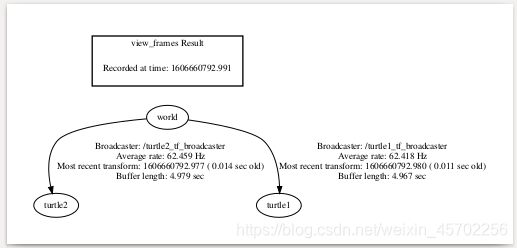
a: rosrun tf view_frames
在主文件夹下生成frames.pdf
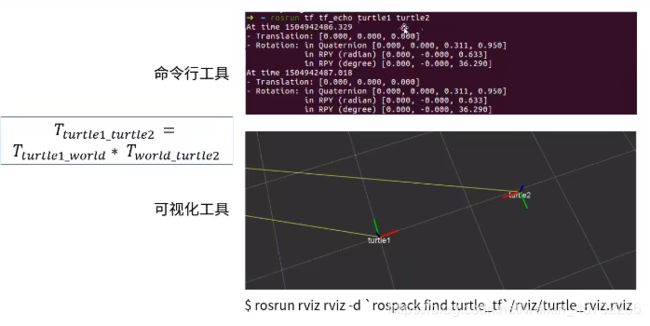
b:显示
tf tf_echo turtle1 turtle2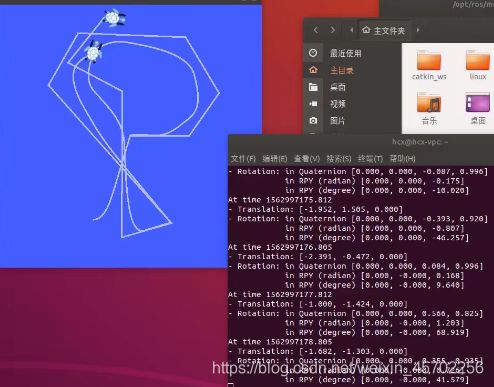
c: 利用rviz
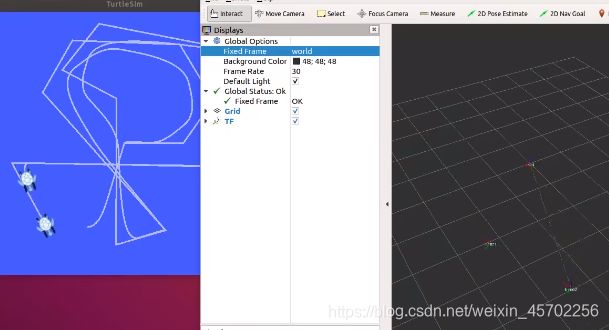
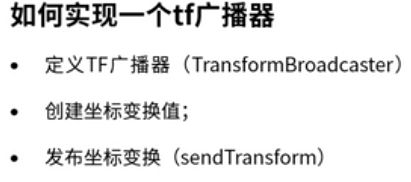
4.12 tf坐标系广播与监听
创建功能包


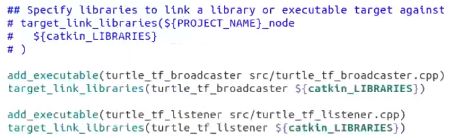
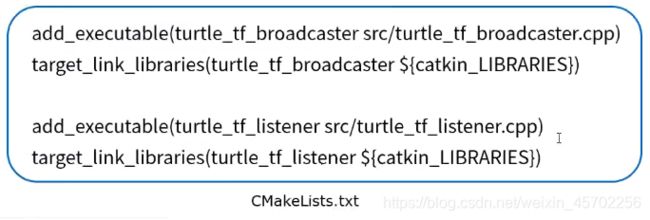
创建TF广播器代码(C++)
turtle_tf_broadcaster.cpp
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include 监听器: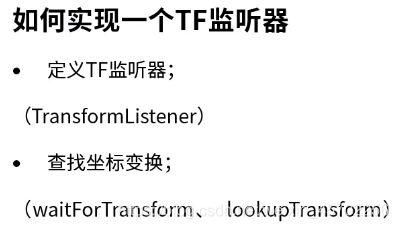
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include 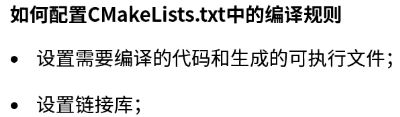
- Python
广播器的编写
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import turtlesim.msg
def handle_turtle_pose(msg, turtlename):
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")
if __name__ == '__main__':
rospy.init_node('turtle_tf_broadcaster')
turtlename = rospy.get_param('~turtle')
rospy.Subscriber('/%s/pose' % turtlename,
turtlesim.msg.Pose,
handle_turtle_pose,
turtlename)
rospy.spin()
监听器的编写
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('turtle_tf_listener')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()
4.13 launch启动文件的使用方法

Launch文件 :通过XML文件实现多节点的配置和启动(可自动启动ROS Master)
launch文件语法:

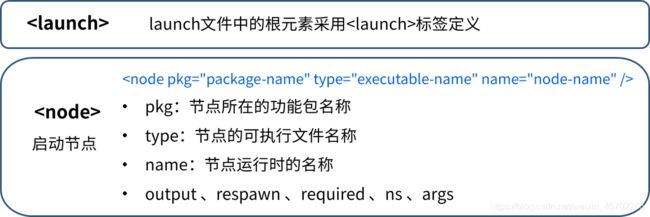

例1:
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
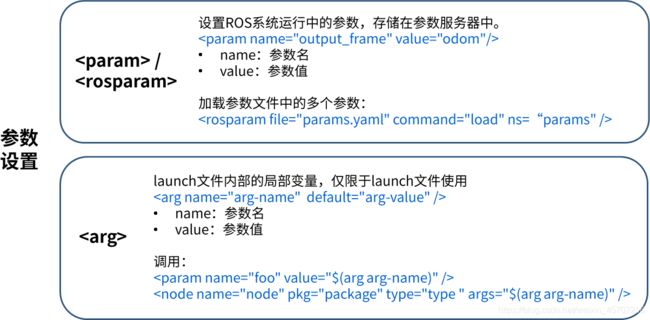
例2:
<launch>
<param name="/turtle_number" value="2"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<param name="turtle_name1" value="Tom"/>
<param name="turtle_name2" value="Jerry"/>
<rosparam file="$(find learning_launch)/config/param.yaml" command="load"/>
</node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen"/>
</launch>
例3:
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener" name="listener" />
</launch>
例4:
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py">
<param name="turtle" type="string" value="turtle1" />
</node>
<node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py">
<param name="turtle" type="string" value="turtle2" />
</node>
<node pkg="learning_tf" type="turtle_tf_listener.py" name="listener" />
</launch>
例5:
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/>
</node>
</launch>
4.14常用可视化工具的使用
4.14.1 rqt

4.14.2 rviz
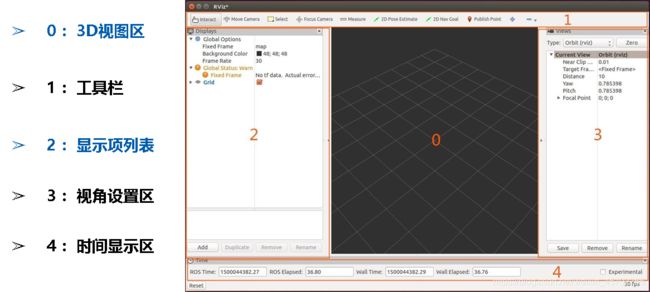
roscore
rosrun rviz rviz
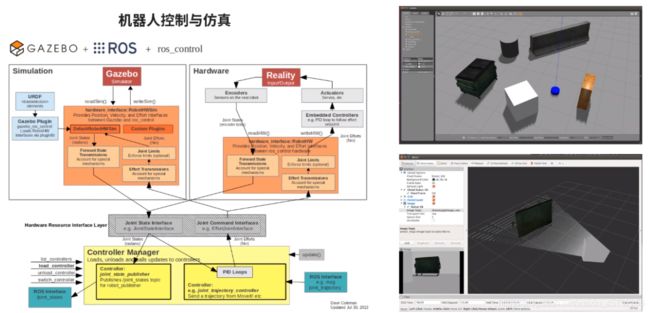
4.14.3 Gazebo
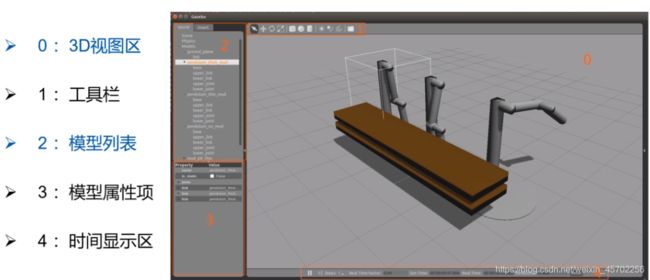
roslaunch gazebo_ros
4.15 资料学习
视频学习:https://www.bilibili.com/video/BV1zt411G7Vn?p=21
古月居:https://www.guyuehome.com/
古-月:https://blog.csdn.net/hcx25909/category_1191901.html
ROS Robots : https://robots.ros.org/
ROS Wiki: https://wiki.ros.org/
ZhangRelay 专栏:https://blog.csdn.net/ZhangRelay