几种重要的排序算法——插入排序
插入排序
1.插入排序
插入排序分为直接插入排序、折半插入排序、希尔排序(shell sort),后两种是在直接插入排序的改进上而来。
1.直接插入排序
排序思路:假设待排序的元素存放在数组 A [ 1.. n ] A[1..n] A[1..n]中,在排序过程的某一时刻,A被划分为两个子区间 A [ 1.. m i d ] A[1..mid] A[1..mid]和 A [ m i d + 1.. n ] A[mid+1..n] A[mid+1..n],其中前一个子区间为排好序的有序区,而后一个子区间为未排序的子区间,暂称作无序区。该排序算法顾名思义,取出无序区的第一个元素 A [ m i d + 1 ] A[mid+1] A[mid+1]插入到有序区 A [ 1.. m i d ] A[1..mid] A[1..mid]中适当的位置, A [ 1.. m i d + 1 ] A[1..mid+1] A[1..mid+1]变成新的有序区(假设按照升序排序)。动画演示如下:
对于第i趟排序,要将无序区的第一个元素 A [ m i d + 1 ] A[mid+1] A[mid+1](设 A [ m i d + 1 ] 的 值 为 a A[mid+1]的值为a A[mid+1]的值为a)插入到有序区的适当位置,此时便将 a a a不断的与有序区的元素进行比较(即为动画中红色条形与绿色条形的部分),当找到第一个比 a a a小的元素时(假设是 A [ m ] ( 1 ≤ m < m i d + 1 ) A[m](1\leq m
c/c++代码描述:
void InsertSort(int A[], int n)
{
int i, j;
for (int i = 2; i <= n; i++) // 依次将A[2]~A[n]插入到前面已经有序区
{
if (A[i] < A[i - 1]) // A[i]小于其前面的元素,将A[i]放入有序区
{
A[0] = A[i]; // A[0]不存放元素,专用于来存放当前需要插入的值
for (j = i - 1; A[j] > A[0]; j--) // 从后往前寻找插入位置,直至找到第一个比A[i]小的元素时停止
A[j + 1] = A[j]; // 向后挪一个位置,腾出地方让给A[i]
}
A[j + 1] = A[0]; // A[i]归位,放到有序区合适的位置
}
}
python代码描述:
def insert_sort(a):
length = len(a)
for i in range(1,length):
waitting_insert_ele = a[i]
j = i - 1
while j > -1 and a[j] > waitting_insert_ele: # 与前面有序区进行比较,如果比前面有序区第一个大,则停止,将该元素插入此位置
a[j + 1] = a[j] # 后移操作,给待插入元素“腾位置”
j -= 1
a[j+1] = waitting_insert_ele # 当不比前面的数值小时,便在当前位置“赖着不走”
print(a)
a = [3,44,38,5,47,15,36,26,27,2,46,4,19,50,48]
insert_sort(a)
运行结果如下:
算法分析:
空间复杂度:因为直接插入排序并没有开第二个数组,它仅仅只是就着他自己的原来的数组进行排序,利用的存储空间是常数个空间,因而其空间复杂度为 O ( 1 ) O(1) O(1),即原地工作。
时间复杂度:在排序过程中,向有序区逐个的插入元素进行了 n − 1 n-1 n−1趟,每趟都分为两步:
- 和前一元素进行比较
- 将前一元素进行往后挪
其中比较的次数与待排序数组的初始状态有关,在最优情况下,表中元素已有序,此时每遍历一次,都不用移动元素,且只需比较一次,时间复杂度为 O ( n ) O(n) O(n)。在最坏情况下,数组中元素与要排序顺序相反(在本博客中以初始时降序排列为反序),总的比较次数达到最大均为 O ( n 2 ) O(n^2) O(n2)。平均情况下总的比较次数和移动次数约为 n 2 4 \frac{n^2} {4} 4n2,所以时间复杂度为 O ( n 2 ) O(n^2) O(n2)。
稳定性:每次插入元素时,总是从后向前比较再移动,所以相同元素的相对位置不会发生变化,直接插入排序是一个稳定的排序算法。
适用性:直接插入排序适用于顺序存储和链式存储的线性表。
2.折半插入排序
排序思路: 思路同直接插入排序一致,但在进行元素比较时采用的是折半查找,在查找待插入位置时时间复杂度为 O ( n l o g 2 n ) O(nlog_2n) O(nlog2n)(折半查找的时间复杂度)。
c/c++代码描述:
void InsertSort(int A[], int n)
{
int i, j, low, high, mid;
for (int i = 2; i <= n; i++) // 依次将A[2]~A[n]插入到前面已经有序区
{
A[0] = A[i]; // A[0]不存放元素,专用于来存放当前需要插入的值
low = 1;
high = i - 1;
while (low < high)
{
mid = (low + high) / 2; //取中间节点
if (A[mid] > A[0])
high = mid - 1; // 插入位置应在左半子表,即有序区的前半部分
else
low = mid + 1; // 插入位置应在右半子表,即有序区的后半部分
}
for (j = i - 1; j > high + 1; j--) // 从后往前寻找插入位置,直至找到第一个比A[i]小的元素时停止
A[j + 1] = A[j]; // 向后挪一个位置,腾出地方让给A[i]
A[high + 1] = A[0]; // A[i]归位,放到合适的地方
}
}
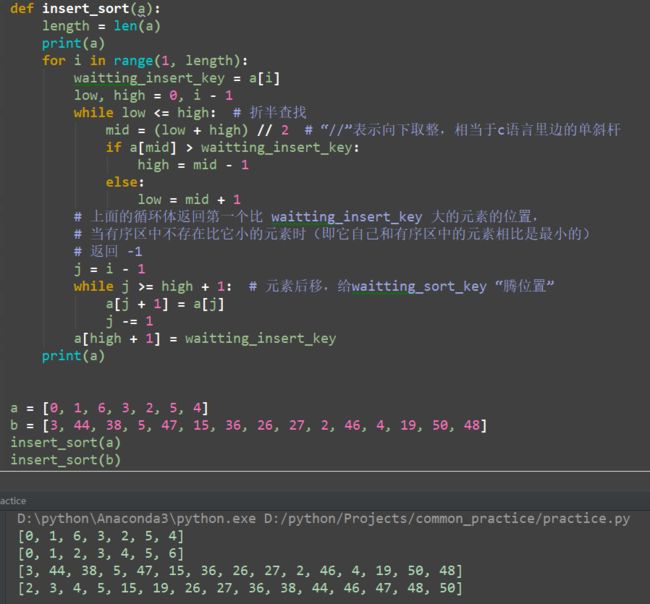
python代码描述:
def insert_sort(a):
length = len(a)
print(a)
for i in range(1, length):
waitting_insert_key = a[i]
low, high = 0, i -1
while low <= high: # 折半查找
mid = (low + high) // 2 # “//”表示向下取整,相当于c语言里边的单斜杆
if a[mid] > waitting_insert_key:
high = mid - 1
else:
low = mid + 1
# 上面的循环体返回第一个比 waitting_insert_key 大的元素的位置,
# 当有序区中不存在比它小的元素时(即它自己和有序区中的元素相比是最小的)
# 返回 -1
j = i - 1
while j >= high + 1: # 元素后移,给waitting_sort_key “腾位置”
a[j + 1] = a[j]
j -= 1
a[high + 1] = waitting_insert_key
print(a)
a = [0,1,6,3,2,5,4]
b = [3,44,38,5,47,15,36,26,27,2,46,4,19,50,48]
insert_sort(a)
insert_sort(b)
运行结果如下:
算法分析: 折半插入排序仅仅只是减少了比较的时间而已,而对于腾出空间的挪动操作并未有改变,挪动次数取决于元素在存储结构中的初始位置,若初始表中数据整体有序的较多,则移动次数较少,因此折半插入排序的时间复杂度仍然是 O ( n 2 ) O(n^2) O(n2)。折半插入排序是一种稳定的排序算法。
3.希尔排序(shell sort)
排序思路: 先将待排序的元素分组,从初始表中每相隔距离d取一个元素,形如 L [ i , i + d , i + 2 d , i + 3 d , . . . , i + k d ] L[i,i+d,i+2d,i+3d,...,i+kd] L[i,i+d,i+2d,i+3d,...,i+kd],首次可将n个元素划分成 d d d个组(即从第1个元素到第d个元素直接的所有元素是每组的第一个元素,“头儿”),每次分别对这些组进行直接插入排序,当整个表中的元素已基本有序时,再对全体记录进行一次直接插入排序。希尔排序每趟并不产生有序区,在最后一趟排序结束前,所有元素并不一定归位了,但是在希尔排序每趟完成后数据越来越接近有序。动画效果如下(演示动画仅进行了一次分组,第二趟排序便直接对整个序列进行排序了):
动画中演示的是先将分组中值较大的调整至后面,再将值较小的调整至前。
c/c++代码描述:
void shellSort(int A[], int n)
{
int d, i, j;
for (d = n / 2; d >= 1; d / 2) //每次分组的间隔长度,步长变化
for (i = d + 1; i <= n; i++)
if (A[i] < A[i - d]) //需将A[i]插入有序区
{
A[0] = A[i];
for (j = i - d; j > 0 && A[j] > A[0]; j -= d)
A[j + d] = A[j]; // 给小组中后面值较小的元素挪位置,让较小的元素尽量往前边靠
A[j + d] = A[0]; // 最终归位
}
}
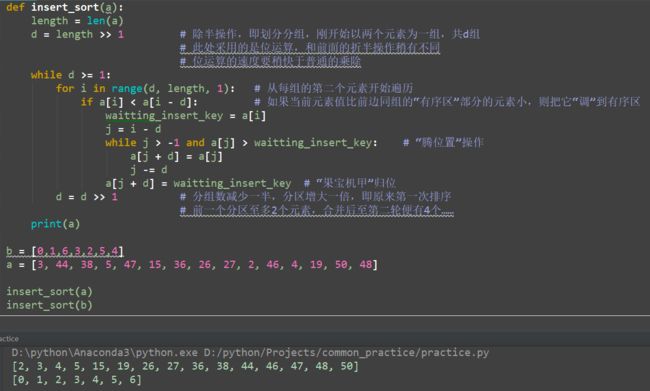
python代码描述:
def insert_sort(a):
length = len(a)
d = length >> 1 # 除半操作,即划分分组,刚开始以两个元素为一组,共d组
# 此处采用的是位运算,和前面的折半操作稍有不同
# 位运算的速度要稍快于普通的乘除
while d >= 1:
for i in range(d, length, 1): # 从每组的第二个元素开始遍历
if a[i] < a[i - d]: # 如果当前元素值比前边同组的“有序区”部分的元素小,则把它“调”到有序区
waitting_insert_key = a[i]
j = i - d
while j > -1 and a[j] > waitting_insert_key: # “腾位置”操作
a[j + d] = a[j]
j -= d
a[j + d] = waitting_insert_key # “果宝机甲”归位
d = d >> 1 # 分组数减少一半,分区增大一倍,即原来第一次排序
# 前一个分区至多2个元素,合并后至第二轮便有4个……
print(a)
b = [0,1,6,3,2,5,4]
a = [3, 44, 38, 5, 47, 15, 36, 26, 27, 2, 46, 4, 19, 50, 48]
insert_sort(a)
insert_sort(b)
运行结果如下:
算法分析:
空间复杂度:因为希尔排序并没有使用第二个数组,它仅仅只是就着他自己的原来的数组进行排序,使用存储空间为常数个空间,因而其空间复杂度为 O ( 1 ) O(1) O(1)。
时间复杂度:由于希尔排序的时间复杂度依赖于增量序列的函数,这涉及数学上未解决的难题,所以其时间复杂度分析比较困难。当n在某个特定范围时,希尔排序的时间复杂度约为 O ( n 1.3 ) O(n^{1.3}) O(n1.3)。在最坏情况下希尔排序的时间复杂度为 O ( n 2 ) O(n^2) O(n2)。
稳定性:希尔排序是一种不稳定的排序算法。
适用性:希尔排序仅适用于线性表为顺序存储的情况。
后记: 文章中的python代码的运行示例的pycharm风格不同是因为文章是断断续续写的,前两张的运行截图是借同学的电脑运行的截图,后一张是自己吃完晚饭在自己电脑上截的图。平常要忙着考研复习,只有中午、晚上吃完饭回寝室才有时间写一下,文章连着写了好几天才写完。后面也会挤时间陆续把其他的几个基础算法补齐的。欢迎各位大佬指正文中不足的部分,弟弟以后定加改正!