泊车功能专题介绍 ———— APS(Assisted Parking System)标准(ISO 16787)
文章目录
- 介绍
- 通用要求
-
- 泊车控制最大运行速度
- 退出条件
- 建议
- 空间车位
-
- 水平空间车位
- 垂直空间车位
- 泊车流程
- 流程定义
-
- Queiscent Mode
- Search Mode
- Slot Found
- Mode Selection
- Assisted Parking Mode
- End of Assisted Parking Mode
- 人机交互策略
-
- 车位搜索阶段
- 车位搜索到且未激活泊车
- 驾驶员请求
- 泊车过程中的信息提示
- 泊车结束
- 性能指标
-
- 搜索车位
- 泊车进程
-
- 水平空间车位的最终姿态
- 垂直空间车位的最终姿态
- 测试需求
-
- 路沿
- 环境因素
- 车位搜索
- 成功率
- 线车位
-
- 基本系统功能
-
- 垂直车位几何要求
- 水平车位几何要求
- 泊车流程
- 性能指标
-
- 垂直车位
- 水平车位
- 车位识别
- 最终姿态
-
- 垂直车位
- 水平车位
- 测试需求
-
- 垂直车位
- 水平车位
- 垂直车位最终位置
- 水平车位最终位置
介绍
APS(Assisted Parking System) 系统应可以识别可停放的车位,确定目标停车位置并计算停车轨迹。APS是通过横纵向控制讲车辆引导至目标停车位置。在到达指定位置之后,需要保证驻车控制且需要保证停车位置相对于目标位置的精度控制在一定的范围内。总体来讲,APS可以识别两种车位类型:一种是两参考障碍物组成的空间车位,另一种是绘制车位线定义的车位类型。在上述的两种类型中,水平和垂直均可以识别到。此外,我想补充一点:部分主机厂可能会存在多一种车位类型定义:混合车位。混合车位可以理解为是由障碍物和车位线共同组成的车位类型。单对感知来讲,就是对障碍物和车位线的识别。所以,混合车位也可以理解为上述两种车位的组合。此外,我们平时还会遇到斜列车位,又叫鱼骨车位,对于感知来讲是可以讲该车位类型划分至垂直车位当中。本文是基于ISO 16787标准展开的介绍,在其中也会加入自己对于APS功能的认知。本文内容,仅供参考。
通用要求
泊车控制最大运行速度
按照ISO 16787中的定义,控制过程中最大的运行速度为前行为10km/h;后退为7km/h~12km/h。如果超过了这个速度范围,泊车控制就应终止。就目前已经量产的项目中,没有那家主车厂的泊车速度会达到这个阈值。在我了解的范围内,主机厂一般不会对行进方向的不同而做不同的速度要求,同时最大的运行速度一般处于3km/h-5km/h。
退出条件
按照ISO中的描述。它定义了三种宽泛的推出条件:
1.转向扭矩过大导致退出。具体的转向扭矩需OEM自主定义,但是大概在5Nm左右。
2.APS系统自身出现故障。
3.速度超限。
在实际的项目中,退出条件肯定不止这些。我认为标准中只是定义了这三类故障必须导致APS系统的退出。
建议
APS系统只是一个辅助驾驶功能,在功能激活或者开启时应特别提醒驾驶员在驶入车位时的安全责任。如果系统检测到不安全的情况,应提示和建议驾驶员接管车辆的控制权。在驶入车位的时候,还需要识别障碍物。具体的示例可以参考ISO 17386(MALSO)和 ISO 22840(ERBA)。
空间车位
水平空间车位
水平空间车位如下图所示。车位长x0为车长+Δx_p,车位宽度为y0为车宽+0.2m。在该场景下,APS系统需要考虑有无侧方参照物。如果存在侧方参照物,那么泊车姿态需要参考侧方参照物。如果不存在,则需要参考两侧的参考车进行泊车姿态的描画。该标准中只定义了最基本的场景,具体的用户场景可以根据此基本场景进行一定的延申,以OEM定义为主。
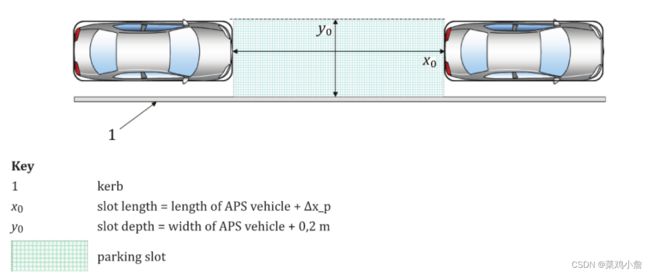
关于Δx_p的计算是根据车辆自身长度进行计算的,计算规则如下:
1.车长位于(4,6)m区间,则Δx_p= 车长0.25;
2.车长≤4m,则Δx_p= 4m0.25=1m;
3.车长≥6m,则Δx_p= 6m*0.25=1.5m;
垂直空间车位
垂直空间车位如下图所示。车位宽x0为车宽+Δx_l,车位深度为y0为车长。该标准中只定义了最基本的场景,具体的用户场景可以根据此基本场景进行一定的延申,以OEM定义为主。
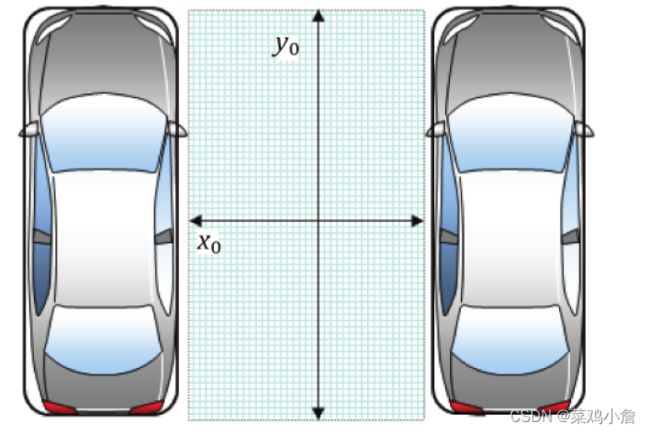
关于Δx_l的值,该标准定义里面推荐范围为1.2m
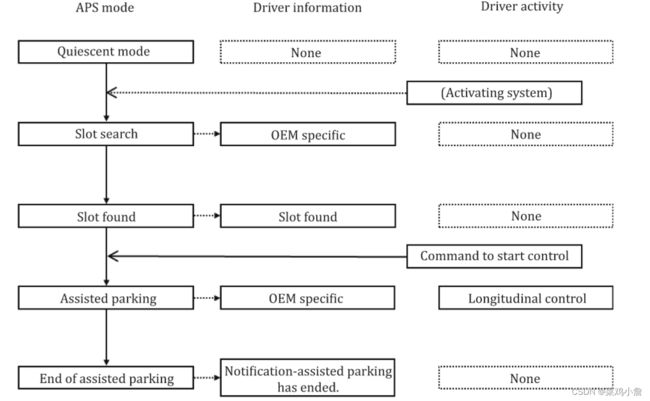
泊车流程
最简单的流程可以参考下图。里面其实大量的流程都是由OEM定义的,所以这个部分主要是依据各自项目中的内容定义实施。
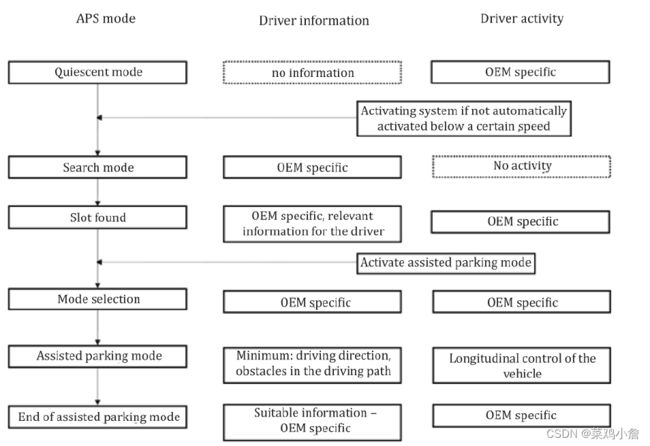
流程定义
Queiscent Mode
顾名思义,这属于静态模式。换句话说,这属于功能关闭状态。在此模式下,APS系统不应有任何动作。
Search Mode
在完全满足APS激活的条件下,且车辆运行在一定的速度下(Vsearch_max)时,APS系统应从周围环境中搜索可用的车位。在前行搜索车位的过程中,APS系统通常可以搜索左右两侧的车位。由于感知的限制,APS系统可能无法准确识别到车位内的障碍物,并且这些障碍物在泊入过程中影响到泊车进程。考虑到垂直车位的情况,感知可能无法探测到整个垂直车位内的障碍物。
Slot Found
APS系统应通知驾驶员系统搜索到的可能泊入的车位。在泊入之前,需驾驶员自行检查障碍物的相关情况才能进入下一步。
Mode Selection
当APS系统行驶至可开始泊车的位置,系统应通知驾驶员。
Assisted Parking Mode
当驾驶员将车辆行驶至可泊车位置并且停车,APS系统应指引驾驶员完成操作并进行横纵向握手。系统对于驻车操纵的能力取决于APS系统开始控制车辆的起始位置。对于起始位置的限制,应在车辆的用户手册中定义。
End of Assisted Parking Mode
当退出或者完成泊车进程时,APS系统应通知到驾驶员。
人机交互策略
车位搜索阶段
此阶段的提示应该全部由OEM自主定义。
车位搜索到且未激活泊车
APS系统应通知驾驶员搜索到的车位信息。
驾驶员请求
OEM应定义具体哪些流程中的活动需要驾驶员操作才能请求得到横纵向的控制。此外,如果存在多个车位的情况,还需要驾驶员确认最终泊入的车位。
泊车过程中的信息提示
在APS系统控制车辆时,下方两种信息应该提示到驾驶员:
1. 在进行转向控制时,系统应提供声音提示。
2. 系统出现故障时,系统应通知驾驶员。
泊车结束
APS系统应通知驾驶员系统已经结束泊车流程和停止横纵向控制。
性能指标
搜索车位
泊车进程
水平空间车位的最终姿态
D_r:后轮与参考物的距离,参考物可以是路沿、墙壁或者车辆连接线。如果参考物是路沿,这个值推荐的范围为0.05m~0.3m之间。如果是车辆连接线,则需要结合车辆宽度与OEM定义值共同决定。
D_f:后轮与参考物的距离,参考物可以是路沿、墙壁或者车辆连接线。如果参考物是路沿,这个值推荐的范围为0.05m~0.3m之间。如果是车辆连接线,则需要结合车辆宽度与OEM定义值共同决定。
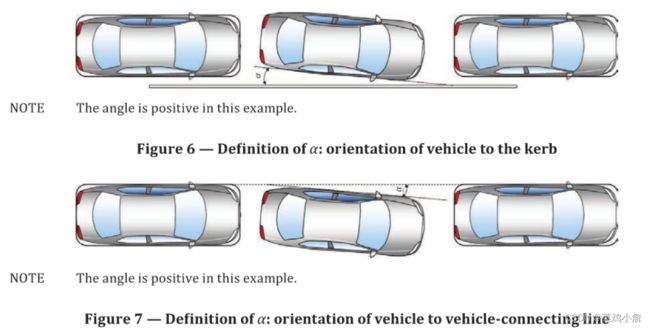
α:车辆倾斜角度。该角度是通过D_f和D_r运送三角函数计算得到的。从标准定义中可以解读到,该角度的范围为-3°~3°。0°是最理想的状态。
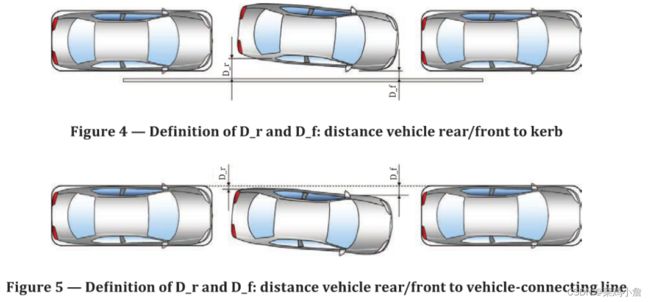
这里我延伸出另外一组参数前后距离(D_F, D_R)。为什么需要引入这部分的参数,OEM通常会要求在车位长度某个范围内,车辆需要参考两车实现居中停靠。因此就产生了横向偏差和纵向偏差。纵向偏差和横向偏差的计算通常有两种方式:第一种是(|D_F - D_R| /2),第二种是(|D_F - D_R|)。这两种的区别在于:如果客户要求的横纵向偏差小于20cm,那么按照第一种计算方式,这个要求是对于单个参数的要求。按照第二种计算方式,那这个要求是对于双边的要求。换言之,第二种的控制精度是第一种的两倍。 具体采用那种方式,需参考感知的输出。

垂直空间车位的最终姿态
垂直车位的目标车位由四条线构成:L1;L2;L3;L4。
1. L1 —— 与左侧参考车是平行的线,距离左侧参考车0.3m;
2. L2 —— 与参考车前方连接线平行的线,距离参考车前方连接线0.4m;
3. L3 —— 与右侧参考车是平行的线,距离右侧参考车0.3m;
4. L4 —— 与参考车后方连接线平行的线,距离参考车后方连接线0.4m。
当车辆停止时,车辆除后视镜外其余车身均应处于四条线组成的目标区域内。车身的倾斜角度也应保证处于-3°~3°。0°是最理想的状态。

测试需求
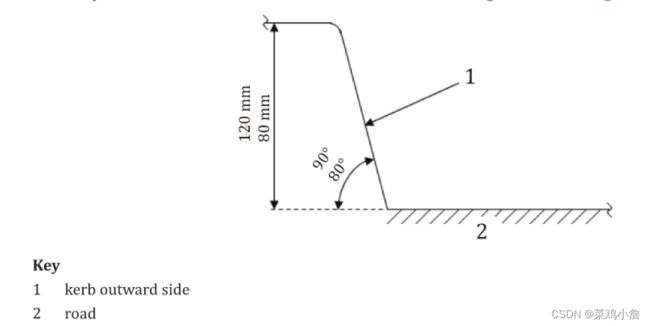
路沿
具体要求参考下图。
环境因素
1. 风速不应大于5.4m/s;
2. 测试温度为5℃~30℃;
3. 无干扰感知的因素,如雨、雪、雨夹雪等恶劣天气;
4. 测试场景应保证路面的平坦和干燥;
5. 测试区域应保持无影响回波或者反射的障碍物。
如果在不满足上述条件的情况下进行测试,需进行多次验证才能证明其合理性。
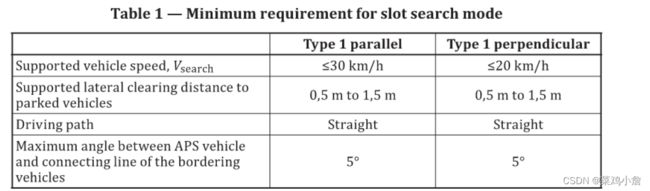
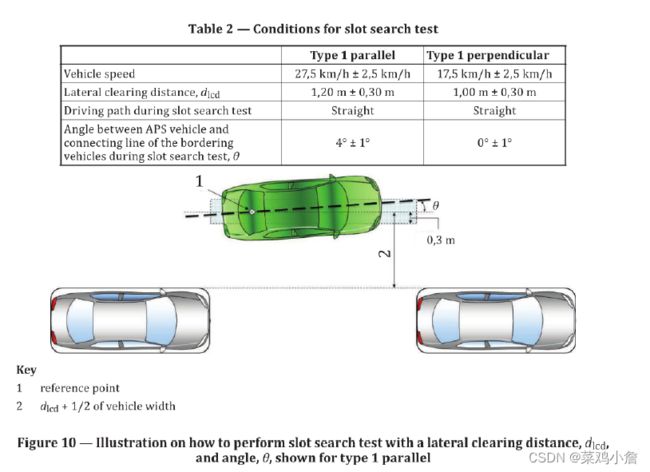
车位搜索
推荐值如下:
成功率
同一个场景中的车位至少应被测试10次,在这10次的测试中,至少有9次是成功泊入的。成功泊入代表从搜车位开始的整个泊车过程,且泊车姿态符合要求。
线车位
基本系统功能
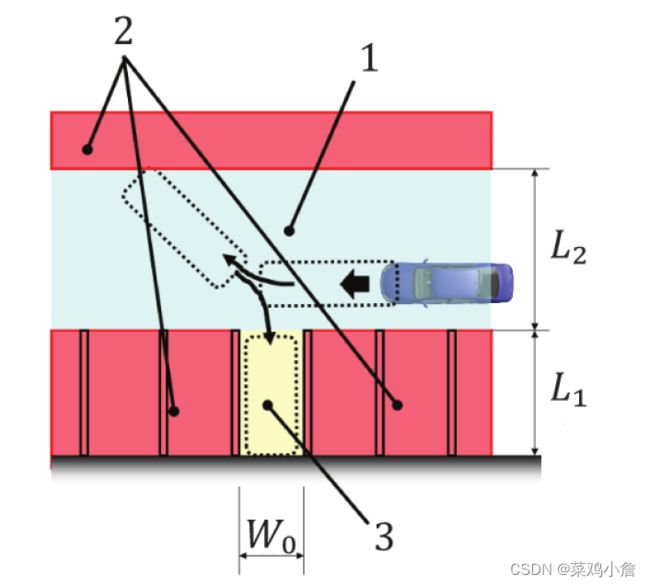
垂直车位几何要求
具体的几何要求见下图,参数描述如下:
1 —— 允许APS系统控制的区域。
2 —— 禁止驶入的区域。
3 —— 目标车位。
W0 —— 2.5m。对于车宽>1.9m的车辆,该宽度为车宽+0.6m(每侧预留0.3m)。
L1 —— 6.0m。对于车宽>1.9m的车辆,该长度为车长+1m(每侧预留0.5m)。
L2 —— 7.0m。
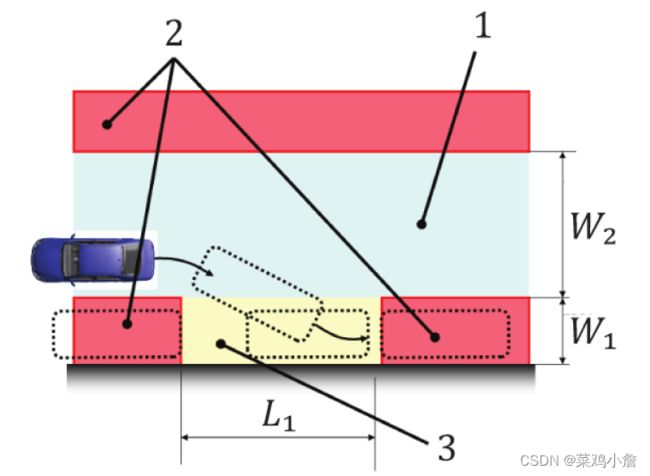
水平车位几何要求
具体的几何要求见下图,参数描述如下:
1 —— 允许APS系统控制的区域。
2 —— 禁止驶入的区域。
3 —— 目标车位。
L1 —— 车长*1.4。
W1 —— 2.5。
W2 —— ≥4.5m。
泊车流程
标准中定义的流程与空间车位的流程不一致。我认为是标准中的仅是一份参考,具体的还是以项目为准。
性能指标
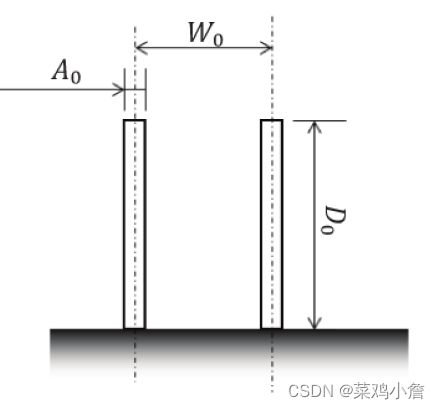
垂直车位
具体要求如下。参数介绍如下:
W0 —— 车位宽度2.5m。对于车宽>1.9m的车辆,该宽度为车宽+0.6m(每侧预留0.3m)。
D0 —— 车位深度6.0m。
A0 —— 车位线宽度0.15m。
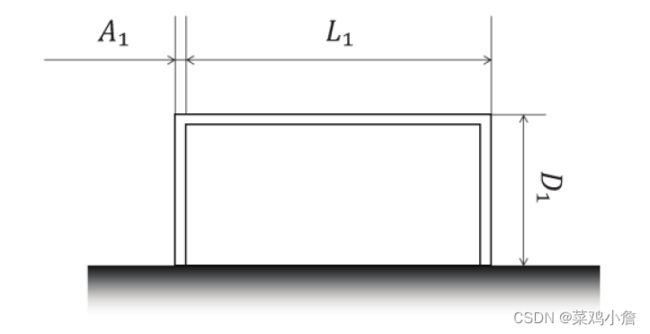
水平车位
具体要求如下。参数介绍如下:
L1 —— 车位长度7.0m。
D1 —— 车位深度2.5m。
A1 —— 车位线宽度0.15m。
车位识别
APS系统识别车辆的最低照度应为100 lux。
车位线的照度与路面的照度之比应 ≥5。具体的照度比计算为(车位线照度 - 路面照度)/路面照度。
最终姿态
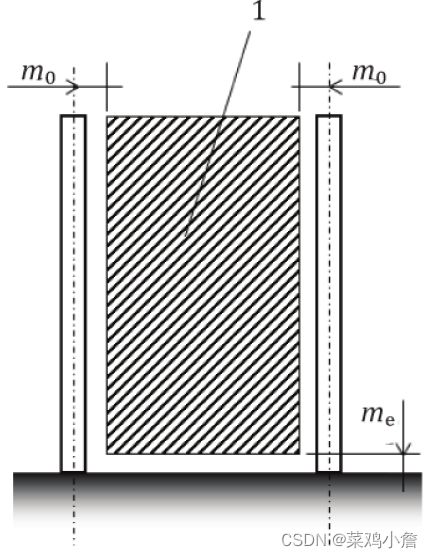
垂直车位
要求参考下图。具体的参数解析如下:
1 —— 目标停车区域
m0 —— 0.1m。
me —— 0.1m。
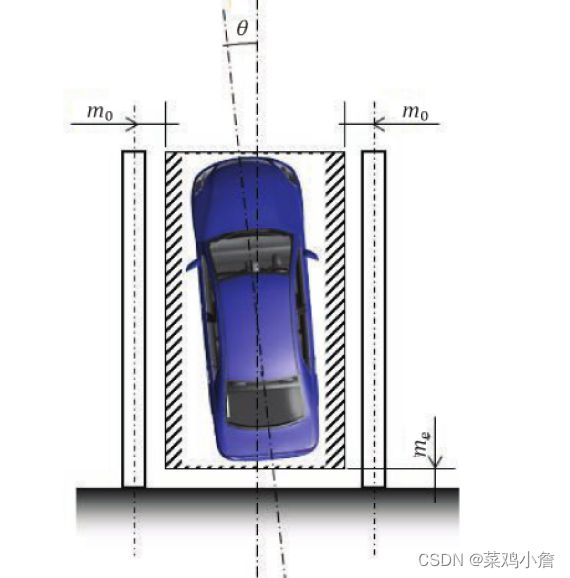
 当车辆停放存在偏差时,具体的可以参考下图。具体的参数解析如下:
当车辆停放存在偏差时,具体的可以参考下图。具体的参数解析如下:
θ —— -3°~3°。
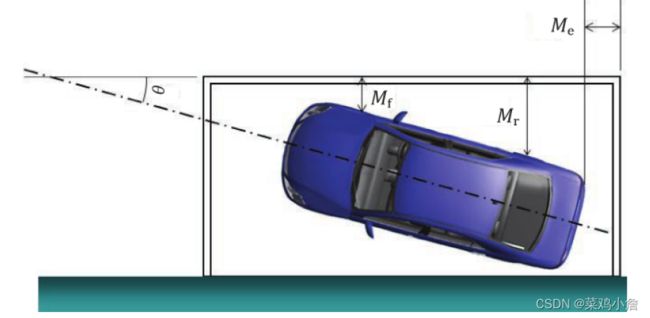
水平车位
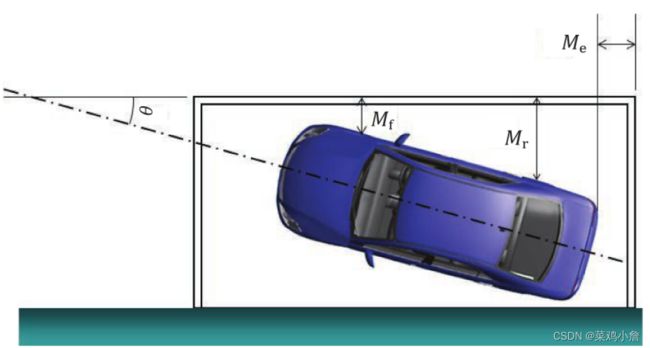
具体泊车姿态的要求如下图。参数解析如下
θ —— -3°~3°。
Mf —— >0m。前轮与外车位线的最短距离
Mr —— >0m。后轮与外车位线的最短距离
Me —— >0m。车身最后端与侧边车位线的最短距离
测试需求
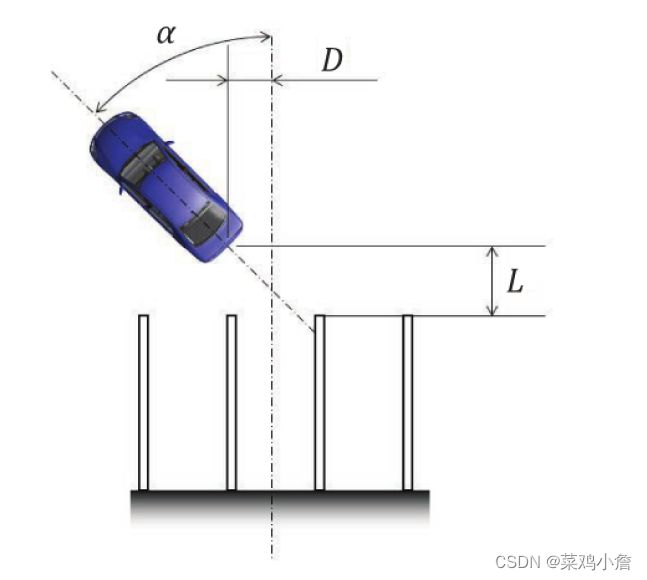
垂直车位
测试目标的典型位置如下图。具体的参数解析如下:
α —— 45°±5°。
L —— 1.8±0.5m
L —— 1.0±0.5m
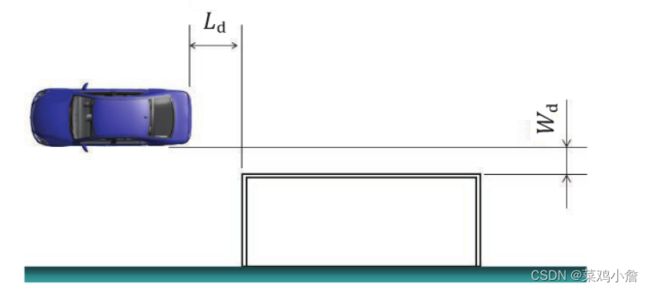
水平车位
测试目标的典型位置如下图。具体的参数解析如下:
Ld —— 车长0.5 ± 0.5m。
Wd —— 车宽0.5 ± 0.5m。
垂直车位最终位置
测试的最终位置如下图。具体的参数解析如下:
θ —— -3°~3°。
Mfl —— >m0。车辆左前轮距离左侧车位线中心的距离。
Mfr —— >m0。车辆右前轮距离右侧车位线中心的距离。
Mrl —— >m0。车辆左后轮距离左侧车位线中心的距离。
Mrr —— >m0。车辆右后轮距离右侧车位线中心的距离。
Me —— >me。车辆末端距离距离车位最远端距离。
m0 —— 0.1m。车位线中心距离目标线车位横向距离。
me —— 0.1m。车位线底部距离目标线车位纵向距离。
标准(ISO 16787)_第20张图片](http://img.e-com-net.com/image/info8/f83fb07929f940e48e3479d97d9218ec.jpg)
水平车位最终位置
测试的最终位置如下图。具体的参数解析如下:
θ —— -3°~3°。
Mf —— >0m。车辆前轮距离外侧车位线的距离。
Mr —— >0m。车辆后轮距离外侧车位线的距离。
Me —— >0m。车辆最末端距离后方车位线的距离。