CAN总线
1、CAN总线简介
CAN总线协议(Controller Area Network),控制器局域网总线,是德国BOSCH(博世)公司研发的一种串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
CAN通讯协议标准(ISO-11898:2003)介绍了设备间信息是如何传递以及符合开放系统互联参考模型(OSI)的哪些分层项。实际CAN通讯是在连接设备的物理介质中进行,物理介质的特性由模型中的物理层定义。ISO11898体系结构定义七层,OSI模型中的最低两层作为数据链路层和物理层,如下图所示:


- LLC用于接收滤波、超载通告、回复管理;
- MAC用于数据封装/拆封、帧编码、媒体访问管理、错误检测与标定、应答、串转发/并转串;
- PLS用于位编码/解码、位定时、同步;
- PMA为收发器特性。
CAN协议主要用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束,该协议的健壮性使其同样适用于自动化和工业环境中。

由于目前在汽车上使用的高速网络系统采用的都是基于CAN总线的标准,特别是广泛使用的ISO 11898国际标准。CAN总线通常采用屏蔽或非屏蔽的双绞线,总线接口能在极其恶劣的环境下工作。根据ISO 11898的标准建议,即使双绞线中有一根断路,或有一根接出其至两根线短接,总线都必须能继续工作。
CAN总线是一种串行数据通信总线,其通信速率最高可达1 Mb/s。CAN系统内两个任意节点之间的最大传输距离与其位速率有关。
CAN总线协议距今已经发展40多年,如今,CAN总线已成为汽车(汽车、卡车、公共汽车、拖拉机等)、轮船、飞机、电动汽车电池、机械等的标准配置。
- CAN之前的版本:汽车ECU是复杂的点对点布线
- 1986年:BOSCH(博世)开发了CAN协议作为解决方案
- 1991年:BOSCH(博世)发布了CAN 2.0(CAN 2.0A:11位,2.0B:29位)
- 1993年:CAN被采用为国际标准(ISO 11898)
- 2003年:ISO 11898成为标准系列
- 2012年:博世发布了CAN FD 1.0
- 2015年:CAN FD协议标准化(ISO 11898-1)
- 2016年:CAN物理层,数据速率高达5 Mbit/s,已通过ISO 11898-2标准化

拓展学习:CAN在自动化中的应用(CiA):CAN技术的历史 (can-cia.org)
CAN总线具有以下特点:
- 符合OSI开放式通信系统参考模型;
- 两线式总线结构,电气信号为差分式;
- 多主控制,在总线空闲时,所有的单元都可开始发送消息,最先访问总线的单元可获得发送权;多个单元同时开始发送时,发送高优先级ID消息的单元可获得发送权;
- 点对点控制,一点对多点及全局广播几种传送方式接收数据,网络上的节点可分成不同的优先级,可以满足不同的实时要求;
- 采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传送数据
- 消息报文不包含源地址或者目标地址,仅通过标识符表明消息功能和优先级;
- 基于固定消息格式的广播式总线系统,短帧结构;
- 事件触发型,只有当有消息要发送时,节点才向总线上广播消息;
- 可以通过发送远程帧请求其它节点发送数据;
- 消息数据长度0~8Byte;
- 节点数最多可达110个;
- 错误检测功能。所有节点均可检测错误,检测处错误的单元会立即通知其它所有单元;
- 发送消息出错后,节点会自动重发;
- 故障限制,具有自动关闭总线的功能,节点控制器可以判断错误是暂时的数据错误还是持续性错误,当总线上发生持续数据错误时,控制器可将节点从总线上隔离,以使总线上的其他操作不受影响;
- 通信介质可采用双绞线、同轴电缆和光导纤维,一般使用最便宜的双绞线;
- 理论上,CAN总线用单根信号线就可以通信,但还是配备了第二根导线,第二根导线与第一根导线信号为差分关系,可以有效抑制电磁干扰;
- 直接通信距离最远可达10KM(速率4Kbps以下),通信速率最高可达1MB/s(此时距离最长40M);
- 总线上可同时连接多个节点,可连接节点总数理论上是没有限制的,但实际可连接节点数受总线上时间延迟及电气负载的限制。
- 每帧信息都有CRC校验及其他检错措施,数据错误率极低;
- 废除了传统的站地址编码,取而代之的是对通信数据块进行编码。采用这种方法的优点是可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块,这种数据块编码方式,还可使不同的节点同时接收到相同的数据,这一点在分步式控制中非常重要。
CAN总线具体以下优势:

2、CAN节点组成
CAN节点通常由三部分组成:CAN收发器、CAN控制器和MCU。
CAN总线通过差分信号进行数据传输,CAN收发器将差分信号转换为TTL电平信号,或者将TTL电平信号转换为差分信号,CAN控制器将TTL电平信号接收并传输给MCU,如下图所示:

目前,我们常用的STM32、华大、瑞萨等单片机内部就集成了CAN控制器外设,通过配置就可实现对CAN报文数据的读取和发送。
3、CAN总线结构
CAN总线是一种广播类型的总线,可支持线形拓扑、星形拓扑、树形拓扑和环形拓扑等。CAN网络中至少需要两个节点设备才可进行通信,无法仅向某一个特定节点设备发送消息,发送数据时所有节点都不可避免地接收所有流量。但是,CAN总线硬件支持本地过滤,因此每个节点可以设置对有效的消息做出反应。
线形拓扑是在一条主干总线分出各个节点支线,其优点在于布线施工简单,接线方便,阻抗匹配规则固定,缺点是拓扑不够灵活,在一定程度上影响通讯距离,如下图所示:

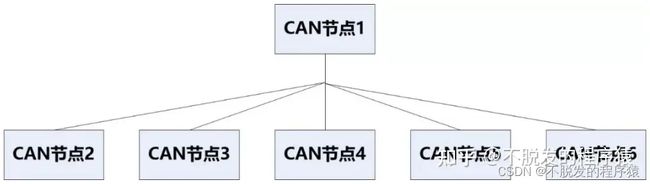
星形拓扑是每个节点通过中央设备连到一起,其优点是容易扩展,缺点是一旦中央设备出故障会导致总线集体故障,而且分支线长不同,阻抗匹配复杂,可能需要通过一些中继器或集线器进行扩展,如下图所示:
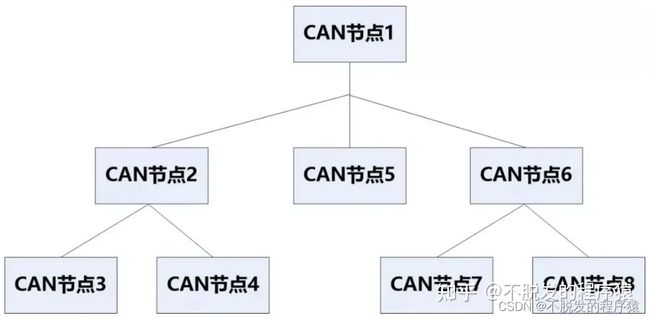
树形拓扑是节点分支比较多,且分支长度不同,其优点是布线方便,缺点是网络拓扑复杂,阻抗匹配困难,通讯中极易出现问题,必须加一些集线器设备,如下图所示:
环形拓扑是将CAN总线头尾相连,形成环状,其优点是线缆任意位置断开,总线都不会出现问题,缺点是信号反射严重,无法用于高波特率和远距离传输,如下图所示:

虽然CAN总线可以支持多种网络拓扑,但在实际应用中比较推荐使用线形拓扑,且在IOS 11898-2中高速CAN物理层规范推荐也是线形拓扑。
在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明)。
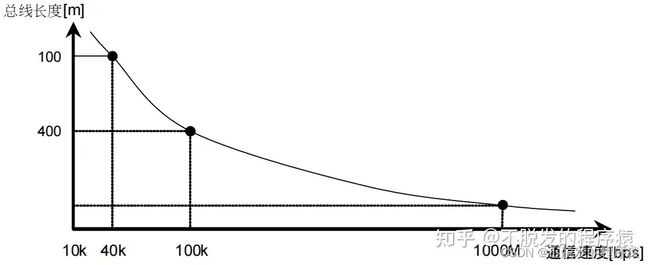
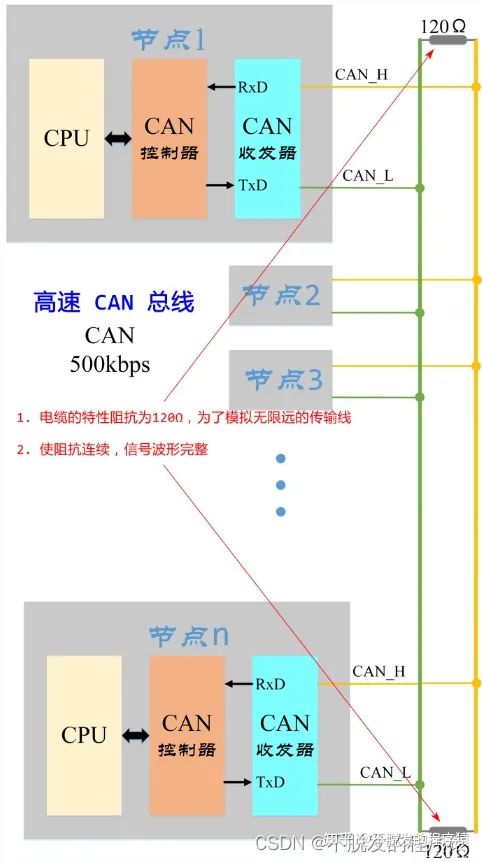
ISO 11898-2中定义了通信速率为125Kbps~1Mbps的高速闭环CAN通信标准,当通信总线长度≤40米,最大通信速率可达到1Mbps,高速闭环CAN(高速CAN)通信如下图所示:
ISO 11898-3中定义了通信速率为10~125Kbps的低速开环CAN通信标准,当传输速率为40Kbps时,总线距离可达到1000米。低速开环CAN(低速容错CAN)通信如下图所示:

4、CAN总线物理电气特性
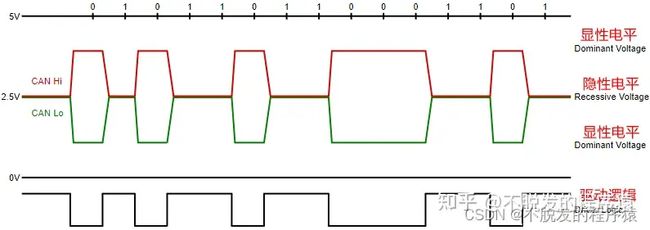
在CAN总线上,利用CAN_H和CAN_L两根线上的电位差来表示CAN信号。CAN 总线上的电位差分为显性电平(Dominant Voltage)和隐性电平(Recessive Voltage),其中显性电平为逻辑 0,隐性电平为逻辑 1。

高速CAN总线(ISO 11898-2,通信速率为125Kbps~1Mbps)在传输显性(0)信号时,会将 CAN_H端抬向5V高电平,将CAN_L拉向0V低电平。当传输隐性(1)信号时,并不会驱动 CAN_H 或者 CAN_L 端。 显性信号 CAN_H 和 CAN_L 两端差分标称电压为 2V。 终端电阻在没有驱动时,将差分标称电压降回 0V。显性信号(0)的共模电压需要在 1.5V 到 3.5V 之间。隐性信号(1)的共模电压需要在+/-12V。
低速/容错CAN(ISO 11898-3,通信速率为10~125Kbps)在传输显性信号(0)时,驱动CANH端抬向5V,将CANL端降向0V。在传输隐性信号(1)时并不驱动CAN 总线的任何一端。在电源电压VCC为5V时,显性信号差分电压需要大于2.3V,隐性信号的差分电压需要小于0.6V。CAN总线两端未被驱动时,终端电阻使CAN L端回归到RTH电压(当电源电压VCC为5V时,RTH电压至少为Vcc-0.3V=4.7V),同时使CAN H端回归至RTL电压(RTL电压最大为0.3V)。两根线需要能够承受-27V至40V的电压而不被损坏。

在高速和低速CAN中从隐性信号向显性信号过渡的速度更快,因为此时CAN线缆被主动积极地驱动,显性向隐性的过渡速度主要取决于CAN网络的长度和导线的电容。