序列模型,语言模型,RNN的相关概念
序列模型,语言模型,RNN
循环神经网络(RNN)通过引入状态变量来存储过去的信息和当前的输入,从而确定当前的输出。这种结构使得RNN非常适合处理序列信息,因为它可以捕捉到序列中的时间依赖性。这与卷积神经网络(CNN)的工作方式形成了对比,CNN主要用于处理空间信息,如图像等。
序列模型概念
在序列模型中,预测
x t ∼ P ( x t ∣ x t − 1 , . . . , x 1 ) x_t \sim P(x_t | x_{t-1}, . . . , x_1) xt∼P(xt∣xt−1,...,x1)
表示在给定前t-1个元素的条件下,第t个元素的概率分布。
自回归模型:这种模型假设当前的观测值只依赖于过去的一定数量(τ)的观测值。这样的好处是模型的参数数量始终是固定的,即使用观测序列 x t − 1 , . . . , x t − τ x_{t-1}, . . . , x_{t-τ} xt−1,...,xt−τ,这使得我们可以训练一个深度网络。自回归模型的名字来源于它对自身的回归,即当前的观测值是过去观测值的函数。
隐变量自回归模型:这种模型除了考虑过去的观测值,还保留了一个对过去观测的总结(隐状态)。在这个模型中,我们不仅预测当前的观测值,而且还更新隐状态。这个模型被称为"隐变量自回归模型",因为它包含了未被观测到的隐状态。在这个模型中,当前的观测值是基于隐状态的条件概率,隐状态则是基于过去的隐状态和过去的观测值的函数。
马尔可夫模型是一种统计模型,它假设系统在下一时刻的状态只依赖于它在当前时刻的状态,而与它在过去的所有状态都无关。这种性质被称为马尔可夫性质或马尔可夫条件。
例子:拟合正弦函数
在时间序列分析中,我们通常将序列数据转换为特征-标签对,以便于机器学习模型进行学习。这里的"嵌入维度" τ \tau τ 是指我们用来预测当前数据点的历史数据点的数量。我们的特征 x t x_t xt 是一个包含了前 τ \tau τ 个数据点的向量,这个向量提供了预测 y t y_t yt 所需要的上下文信息。
然而,对于序列的前 τ \tau τ 个数据点,我们没有足够的历史记录来构建这样的特征向量。因此,如果我们有 N N N 个数据点,我们只能构建 N − τ N - \tau N−τ 个特征-标签对。这就是为什么我们的数据样本比原始序列少了 τ \tau τ 个的原因。
例如,如果我们有一个时间序列 [ x 1 , x 2 , x 3 , x 4 , x 5 ] [x_1, x_2, x_3, x_4, x_5] [x1,x2,x3,x4,x5] 并且我们选择嵌入维度 τ = 2 \tau = 2 τ=2,我们可以构建的特征-标签对包括:特征 x 3 = [ x 1 , x 2 ] x_3 = [x_1, x_2] x3=[x1,x2],标签 y 3 = x 3 y_3 = x_3 y3=x3;特征 x 4 = [ x 2 , x 3 ] x_4 = [x_2, x_3] x4=[x2,x3],标签 y 4 = x 4 y_4 = x_4 y4=x4;特征 x 5 = [ x 3 , x 4 ] x_5 = [x_3, x_4] x5=[x3,x4],标签 y 5 = x 5 y_5 = x_5 y5=x5。但我们不能为 x 1 x_1 x1 和 x 2 x_2 x2 构建特征,因为它们前面没有足够的数据点。
# 代码实现:
import torch
from torch import nn
from torch.utils.data import DataLoader, TensorDataset
import matplotlib.pyplot as plt
# 数据生成
T = 1000
time = torch.arange(1, T + 1, dtype=torch.float32)
x = torch.sin(0.01 * time) + torch.normal(0, 0.2, (T,))
# 数据预处理
tau = 4
features = torch.zeros((T - tau, tau))
for i in range(tau):
features[:, i] = x[i:T - tau + i]
labels = x[tau:].reshape((-1, 1))
# 定义数据加载函数
def load_array(data_arrays, batch_size, is_train=True):
dataset = TensorDataset(*data_arrays)
return DataLoader(dataset, batch_size, shuffle=is_train)
# 加载数据
batch_size, n_train = 16, 600
train_iter = load_array((features[:n_train], labels[:n_train]), batch_size)
# 定义模型
def get_net():
net = nn.Sequential(nn.Linear(4, 10), nn.ReLU(), nn.Linear(10, 1))
net.apply(init_weights)
return net
# 初始化网络权重的函数
def init_weights(m):
if type(m) == nn.Linear:
nn.init.xavier_uniform_(m.weight)
# 定义损失函数
loss = nn.MSELoss(reduction='none')
# 定义训练函数
def train(net, train_iter, loss, epochs, lr):
trainer = torch.optim.Adam(net.parameters(), lr)
for epoch in range(epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.sum().backward()
trainer.step()
print(f'epoch {epoch + 1}, loss: {sum(loss(net(X), y)).item() / len(y):f}')
# 训练模型
net = get_net()
train(net, train_iter, loss, 5, 0.01)
# 预测
onestep_preds = net(features)
plt.plot(time, x, label='data')
plt.plot(time[tau:], onestep_preds.detach().numpy(), label='1-step preds')
plt.xlim([1, 1000])
plt.legend()
plt.show()
# k步预测
max_steps = 64
features = torch.zeros((T - tau - max_steps + 1, tau + max_steps))
for i in range(tau):
features[:, i] = x[i:i + T - tau - max_steps + 1]
for i in range(tau, tau + max_steps):
features[:, i] = net(features[:, i - tau:i]).reshape(-1)
steps = (1, 4, 16, 64)
for i in steps:
plt.plot(time[tau + i - 1:T - max_steps + i], features[:, tau + i - 1].detach().numpy(), label=f'{i}-step preds')
plt.xlim([5, 1000])
plt.legend()
plt.show()

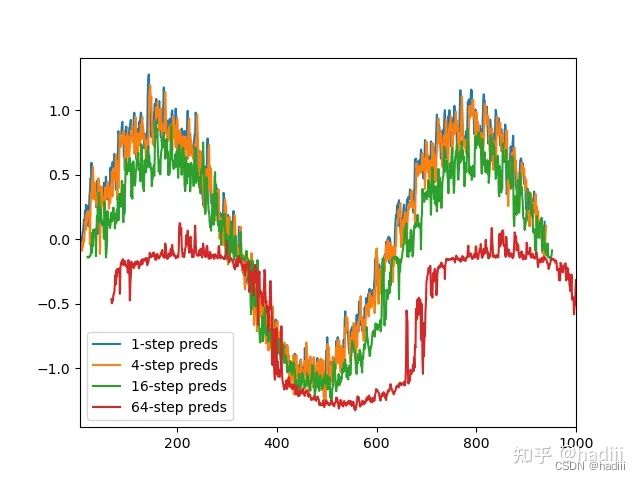
单步预测
k步预测
对于直到时间步t的观测序列,其在时间步t + k的预测输出是“k步预测”。随着我们对预测时间k值的增加,会造成误差的快速累积和预测质量的极速下降。
语言模型概念
文本预处理:
- 将文本作为字符串加载到内存中。
- 将字符串拆分为词元(如单词和字符)。
- 建立⼀个词表,将拆分的词元映射到数字索引(神经网络中用one-hot或者embedding)。
- 将文本转换为数字索引序列,方便模型操作。
在自然语言处理中,我们经常需要对文档或词元序列进行建模。如果我们在单词级别对文本数据进行词元化,我们可以依赖于序列模型的分析。基本的概率规则如下:
P ( x 1 , x 2 , . . . , x T ) = ∏ t = 1 T P ( x t ∣ x 1 , . . . , x t − 1 ) P(x_1, x_2, . . . , x_T ) = \prod_{t=1}^{T} P(x_t | x_1, . . . , x_{t−1}) P(x1,x2,...,xT)=t=1∏TP(xt∣x1,...,xt−1)
例如,一个包含四个单词的文本序列的概率可以表示为:
P ( deep , learning , is , fun ) = P ( deep ) P ( learning ∣ deep ) P ( is ∣ deep , learning ) P ( fun ∣ deep , learning , is ) P(\text{deep}, \text{learning}, \text{is},\text{fun}) = P(\text{deep})P(\text{learning} | \text{deep})P(\text{is} | \text{deep}, \text{learning})P(\text{fun} | \text{deep}, \text{learning}, \text{is}) P(deep,learning,is,fun)=P(deep)P(learning∣deep)P(is∣deep,learning)P(fun∣deep,learning,is)
为了训练语言模型,我们需要计算单词的概率,以及给定前几个单词后出现某个单词的条件概率。这些概率本质上就是语言模型的参数。
我们通常假设训练数据集是一个大型的文本语料库。训练数据集中词的概率可以根据给定词的相对词频来计算。例如,估计值 P ^ ( deep ) \hat{P}(\text{deep}) P^(deep) 可以计算为任何以单词“deep”开头的句子的概率。一种方法是统计单词“deep”在数据集中的出现次数,然后将其除以整个语料库中的单词总数。这种方法效果不错,特别是对于频繁出现的单词。然后,我们可以尝试估计:
P ^ ( learning ∣ deep ) = n ( deep , learning ) n ( deep ) \hat{P}(\text{learning} | \text{deep}) = \frac{n(\text{deep}, \text{learning})}{n(\text{deep})} P^(learning∣deep)=n(deep)n(deep,learning)
其中 n ( x ) n(x) n(x) 和 n ( x , x ′ ) n(x, x') n(x,x′) 分别是单个单词和连续单词对的出现次数。不幸的是,由于连续单词对“deep learning”的出现频率要低得多,所以估计这类单词正确的概率要困难得多。特别是对于一些不常见的单词组合,要想找到足够的出现次数来获得准确的估计可能都不容易。
如果 P ( x t + 1 ∣ x t , . . . , x 1 ) = P ( x t + 1 ∣ x t ) P(x_{t+1} | x_t, . . . , x_1) = P(x_{t+1} | x_t) P(xt+1∣xt,...,x1)=P(xt+1∣xt),则序列上的分布满足一阶马尔可夫性质。阶数越高,对应的依赖关系就越长。这种性质推导出了许多可以应用于序列建模的近似公式:
P ( x 1 , x 2 , x 3 , x 4 ) = P ( x 1 ) P ( x 2 ) P ( x 3 ) P ( x 4 ) P(x_1, x_2, x_3, x_4) = P(x_1)P(x_2)P(x_3)P(x_4) P(x1,x2,x3,x4)=P(x1)P(x2)P(x3)P(x4)
P ( x 1 , x 2 , x 3 , x 4 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 2 ) P ( x 4 ∣ x 3 ) P(x_1, x_2, x_3, x_4) = P(x_1)P(x_2 | x_1)P(x_3 | x_2)P(x_4 | x_3) P(x1,x2,x3,x4)=P(x1)P(x2∣x1)P(x3∣x2)P(x4∣x3)
P ( x 1 , x 2 , x 3 , x 4 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 1 , x 2 ) P ( x 4 ∣ x 2 , x 3 ) P(x_1, x_2, x_3, x_4) = P(x_1)P(x_2 | x_1)P(x_3 | x_1, x_2)P(x_4 | x_2, x_3) P(x1,x2,x3,x4)=P(x1)P(x2∣x1)P(x3∣x1,x2)P(x4∣x2,x3)
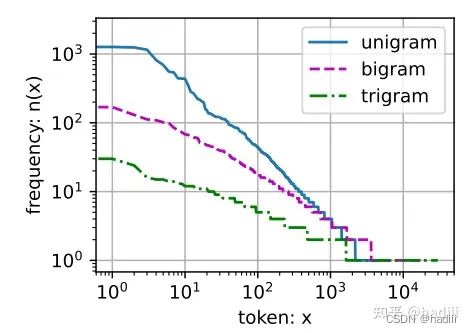
通常,涉及一个、两个和三个变量的概率公式分别被称为一元语法(unigram)、二元语法(bigram)和三元语法(trigram)模型。
齐普夫定律(Zipf’s law):
语言中单词序列遵循齐普夫定律,同时很多n元组出现次数较少,说明语言中存在相当多的结构。
基于深度学习的模型在语言建模方面具有优势,因为它们能够处理稀疏数据并从中学习有用的特征和模式,而不像拉普拉斯平滑方法那样受限。
RNN概念
n元语法模型的局限性:在n元语法模型中,单词 x t x_t xt 在时间步t的条件概率仅取决于前⾯n − 1个单词。对于时间步t − (n − 1)之前的单词,如果我们想将其可能产⽣的影响合并到 x t x_t xt 上,需要增加n,然而模型参数的数量也会随之呈指数增长,因为词表V需要存储 ∣ V ∣ 3 |V|^{3} ∣V∣3 个数字。
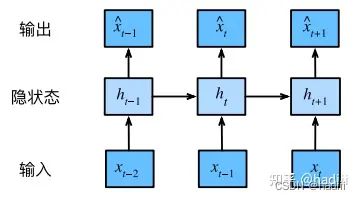
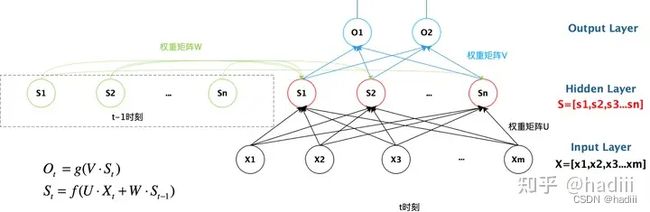
注意,RNN的参数是固定的。无论输入序列的长度如何,RNN的参数(包括输入到隐藏层的权重、隐藏层到隐藏层的权重、偏置项以及可能的隐藏层到输出层的权重等)都保持不变。有一些图示是按照时间步展开的,也就是进行了多次输入输出,横轴上的隐藏状态数并不是隐藏单元数。RNN在不同的时间步上使用的是相同的参数(权重和偏置)。
隐状态变量的长度(或者说维度)是由隐藏层的单元数决定的,而与输入序列的长度无关。每个隐藏单元都会有一个对应的隐状态值,因此隐状态变量的维度就等于隐藏层的单元数。这个隐状态变量会在每个时间步被更新,并用于计算下一个时间步的输出和新的隐状态。
图源:忆臻
注意到,t-1时刻的隐变量是被保存下来的,它在网络中实体和t时刻的隐变量是同一个。
在n元语法模型中,单词 x t x_t xt 在时间步 t 的条件概率仅取决于前面 n - 1 个单词。对于时间步 t - (n - 1) 之前的单词,如果我们想将其可能产生的影响合并到 x t x_t xt 上,需要增加 n,然而模型参数的数量也会随之呈指数增长,因为词表 V 需要存储 ∣ V ∣ n |V|^n ∣V∣n 个数字。因此,与其将 P ( x t ∣ x t − 1 , . . . , x t − n + 1 ) P(x_t | x_{t-1}, . . . , x_{t-n+1}) P(xt∣xt−1,...,xt−n+1) 建模,不如使用隐变量模型,它可以捕获序列中的长期依赖关系,而不仅仅是前 n - 1 个单词的信息。:
P ( x t ∣ x t − 1 , . . . , x t − n + 1 ) P(x_t | x_{t-1}, . . . , x_{t-n+1}) P(xt∣xt−1,...,xt−n+1)
其中 h t − 1 h_{t-1} ht−1 是隐状态(hidden state),也称为隐藏变量(hidden variable),它存储了到时间步 t - 1 的序列信息。通常,我们可以基于当前输入 x t x_t xt 和先前隐状态 h t − 1 h_{t-1} ht−1 来计算时间步 t 处的任何时间的隐状态:
h t = f ( x t , h t − 1 ) h_t = f(x_t, h_{t-1}) ht=f(xt,ht−1)
在下方提供的公式 中,新增了一项 H t − 1 ∗ W h h H_{t−1} * W_{hh} Ht−1∗Whh,这一项表示前一个时间步的隐状态与一个权重矩阵 W h h W_{hh} Whh 的乘积,这个乘积结果与当前时间步的输入一起决定了当前时间步的隐状态。这样的设计使得隐状态能够在时间步之间传递信息,实现了序列信息的记忆功能。
H t = ϕ ( X t W x h + H t − 1 W h h + b h ) H_t = ϕ(X_tW_{xh} + H_{t−1}W_{hh} + b_h) Ht=ϕ(XtWxh+Ht−1Whh+bh)
O t = H t W h q + b q O_t = H_tW_{hq }+ b_q Ot=HtWhq+bq

按时间步展开,具有隐状态的循环神经⽹络
例子:字符级语言模型

交叉熵函数
交叉熵函数是用于衡量两个概率分布之间差异的度量,常用于分类任务中的损失函数。给定真实分布 y y y 和模型预测分布 y ^ \hat{y} y^,交叉熵函数定义为:
l ( y , y ^ ) = − ∑ j = 1 q y j log y ^ j l(y, \hat{y}) = -\sum_{j=1}^{q} y_j \log \hat{y}_j l(y,y^)=−j=1∑qyjlogy^j
其中 q q q 是类别的总数, y j y_j yj 是真实分布的第 j j j 项, y ^ j \hat{y}_j y^j 是模型预测分布的第 j j j 项。
困惑度 (Perplexity)
困惑度是一个概率模型对给定测试数据集的预测能力的度量,直观上可以理解为模型在预测一个序列时的平均分支数或选择数。一个好的语言模型能够较准确地预测接下来可能出现的单词,因此具有较低的困惑度。困惑度的公式为:
exp ( − 1 n ∑ t = 1 n log P ( x t ∣ x t − 1 , … , x 1 ) ) \exp\left(-\frac{1}{n} \sum_{t=1}^{n} \log P(x_t | x_{t-1}, \ldots, x_1)\right) exp(−n1t=1∑nlogP(xt∣xt−1,…,x1))
其中 P ( x t ∣ x t − 1 , … , x 1 ) P(x_t | x_{t-1}, \ldots, x_1) P(xt∣xt−1,…,x1) 是在给定前面单词的条件下,模型预测当前单词 x t x_t xt 的概率。
梯度剪裁 (Gradient Clipping)
对于长度为 T T T 的序列,我们在迭代中计算这 T T T 个时间步上的梯度,将会在反向传播过程中产生长度为 O ( T ) O(T) O(T) 的矩阵乘法链。梯度剪裁通过限制梯度的大小来解决梯度爆炸问题,确保梯度在一个合理的范围内,从而避免梯度过大导致的问题。梯度剪裁的公式为:
g ← min ( 1 , θ ∥ g ∥ ) g g \leftarrow \min\left(1, \frac{\theta}{\|g\|}\right) g g←min(1,∥g∥θ)g
其中 g g g 是梯度向量, θ \theta θ 是梯度剪裁的阈值, ∥ g ∥ \|g\| ∥g∥ 是梯度向量的范数。