CGAL的3D皮肤表面网格
1、介绍
Edelsbrunner 引入的皮肤表面和具有丰富而简单的组合和几何结构,使其适合在生物计算中模拟大分子。 对这些表面进行网格划分通常是进一步处理其几何形状所必需的,例如在数值模拟和可视化中。
皮肤表面由一组加权点(输入球)和一个称为收缩因子的标量定义。如果收缩因子等于一,则表面只是输入球并集的边界。对于小于一的收缩因子,由于出现连接球的球面和双曲面的斑块,皮肤表面变得切线连续。
此程序包使用中描述的算法构建由一组球和收缩因子定义的皮肤表面网格同位素。
实现了一种优化算法,用于对一组球的并集进行网格划分。
2、定义一个skin曲面
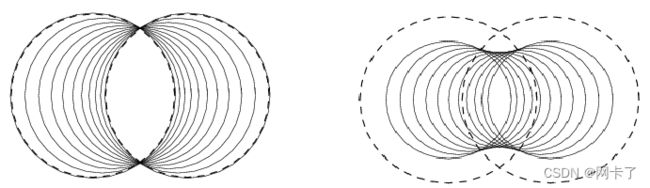
左图:两个加权点(两个虚线圆)的凸组合。右图:加权点的表面曲线。较小的圆形成加权点的子集,其边界是表面曲线。
本节首先简要回顾了皮肤表面。
皮肤表面由一组有限个加权点 P 和一个收缩因子 s 定义,其中 0≤s≤1。加权点 p=(p,wp)∈R3×R 对应于一个中心为 p、半径为 wp−−√ 的球。权重为零的加权点称为无权点。
加权点p=(p,wP)和无权点x之间的伪距离被定义为: π(p,x)=∥p−x∥2−wp,
其中p−x是p和x之间的欧几里得距离。加权点p对应的球是π(p,⋅)的零集。请注意,如果wp<0,则球的半径为虚数,并且零集为空集。
我们可以通过取加权点距离函数的凸组合来获得加权点的凸组合。上图左显示了通过取虚线圆圈的凸组合获得的加权点。
从加权点p=(p,wP)开始,通过与以p为中心的无权点进行凸组合获得收缩加权点ps。形式上,ps=sp+(1-s)p',其中p'=(p,0)。经过简单计算后,我们得到ps=(p,s⋅wp)。通过将P中的每个加权点按比例s收缩获得的集合Ps定义为Ps={ps∣p∈P}。上图(左)中收缩的加权点显示在上图(右)中。
现在我们定义与一组加权点P相关联的皮肤表面skns(P)。考虑输入加权点的凸包的加权点集合。经过计算,可以发现每个加权点都在输入球的并集中。接下来,我们通过收缩凸包中的每个加权点来收缩它们。因此,我们将相应(实数)输入圆的半径乘以因子s√。皮肤表面是该集合的边界:

这里conv(P)⊂R3×R是加权点集P的凸包,而∂表示相应球集的并集在R3中的边界。
回想一下,输入加权点的凸包中的每个加权点都包含在输入加权点的并集中。因此,对于等于 1 的收缩因子,皮肤表面是输入加权点并集的边界。
根据皮肤表面的定义,输入球的权重(它们的半径平方)以s为因子缩小,皮肤表面包裹在缩小的输入球周围。为了使皮肤表面包裹在(未缩小的)输入球周围,我们可以首先将输入球的权重乘以因子1/s,然后计算皮肤表面。
3、接口
皮肤表面包的接口由一个主要功能组成,即获取一组加权点和收缩因子,并输出网格表面。此外,它定义了类和函数,并对用于执行算法的主要步骤进行了分类。存在两个全局类Skin_surface_3和Union_of_balls_3,它们都是概念SkinSurface_3的模型,并且存在从上述类的对象提取皮肤表面的网格(球的并集)的两个函数。最后一个函数获取一个网格和从中构建的Skin_surface_3(Union_of_balls_3)对象,并细化该网格。本节将更详细地描述这些类和函数。
template
void make_skin_surface_mesh_3(Polyhedron_3 &p,
WP_iterator begin, WP_iterator end,
FT shrink_factor=.5,
int nSubdiv=0,
bool grow_balls = true); 下面是make_skin_surface_mesh_3函数的参数解释:InputIterator points_begin:输入迭代器,指向加权点的起始位置。加权点用于定义皮肤表面的几何形状。InputIterator points_end:输入迭代器,指向加权点的结束位置。WeightedPoint:表示加权点的类型,其中包含点的坐标和权重。double shrink_factor:收缩因子,用于控制生成的皮肤表面的平滑程度。较小的收缩因子将导致更平滑的表面,而较大的收缩因子将使表面更加突出。unsigned int number_of_subdivision_steps:细分步骤数,用于控制生成的网格的精细程度。较大的细分步骤数将生成更精细的网格,而较小的细分步骤数将生成较粗糙的网格。OutputIterator mesh_begin:输出迭代器,指向生成的网格的起始位置。网格将以Polyhedron_3的形式存储。
皮肤表面包的主要功能是获取加权点的迭代器范围、收缩因子和细分步骤数,并在 Polyhedron_3 中输出网格
其中,FT是Weighted_points使用的数字类型。
为了更好地控制算法,还可以单独执行不同的步骤。首先,从加权点的迭代器范围和收缩因子中创建一个 Skin_surface_3 对象。可选参数是一个布尔值,它指示输入加权点是否应以这样的方式增长,即皮肤表面围绕输入球而不是收缩的输入球。
template
Skin_surface_3(WP_iterator begin, WP_iterator end,
FT shrink_factor,
bool grow_balls = true); 模板参数应实现SkinSurfaceTraits_3概念。类型WP_iterator是SkinSurfaceTraits_3定义的加权点的迭代器,FT是加权点使用的数值类型。
对于等于一的收缩因子,皮肤表面是输入球的并集的边界。在这种情况下,用于网格化皮肤表面的算法大大简化。这些优化在Union_of_balls_3类中实现。球并集类的构造函数类似,除了缺少收缩因子:
template
Union_of_balls_3(WP_iterator begin, WP_iterator end,
bool grow_balls = true); 使用概念SkinSurface_3的模型,可以生成与皮肤表面同质的粗网格。使用带有签名的函数mesh_skin_surface_3()
template
void mesh_skin_surface_3(const SkinSurface_3 &skin_surface, Polyhedron &p); 最后一个函数采用(粗略的)网格,通过应用给定数量的1-4分割操作(每个三角形被分割成四个子三角形)并在皮肤表面移动新的顶点,在原地对网格进行细分。如果未指定迭代次数,则执行一次细分步骤。需要使用SkinSurface_3概念的对象来构造粗网格,以在皮肤表面上移动新的点。
template
void subdivide_skin_surface_mesh_3 (const SkinSurface_3 &skinsurface,
Polyhedron &p,
int iterations = 1); 4、时间
粗网格的构建和第一次细分的时间以秒为单位,在具有1Gb内存的Pentium 4、3.5 GHz上完成。
| Data set | Number of weighted points | Coarse mesh | first subdivision step |
| Caffeine | 23 | 0.2 sec. | 0.05 sec. |
| Gramicidin A | 318 | 5 sec. | 2 sec. |
CGAL 5.6 - 3D Skin Surface Meshing: User Manual