Course3-Week3-强化学习
Course3-Week3-强化学习
文章目录
- Course3-Week3-强化学习
-
- 1. 强化学习的问题引入
-
- 1.1 什么是强化学习
- 1.2 强化学习示例
- 1.3 数学符号
- 2. 离散状态空间的强化学习
-
- 2.1 回报
- 2.2 策略
- 2.3 状态-动作价值函数
- 2.4 贝尔曼方程
- 2.5 随机环境(可选)
- 3. 连续状态空间的强化学习
-
- 3.1 问题示例——登月器
- 3.2 DQN算法:拟合Q函数
- 3.3 算法改进:改进的神经网络架构
- 3.4 算法改进: ε \varepsilon ε-贪婪策略、小批量、软更新
- 3.5 代码示例-登月器
- 4. 课程总结和致谢
- 笔记主要参考B站视频“(强推|双字)2022吴恩达机器学习Deeplearning.ai课程”。
- 该课程在Course上的页面:Machine Learning 专项课程
- 课程资料:“UP主提供资料(Github)”、或者“我的下载(百度网盘)”。
- 本篇笔记对应课程 Course3-Week3(下图中深紫色)。

1. 强化学习的问题引入
1.1 什么是强化学习
“强化学习(reinforcement learning)”已经被应用于直升机控制,可以让其做“倒飞”等各种特技动作(aerobatic maneuvers),如上图。显然我们不可能使用“有监督学习”来控制直升机,因为整个飞行空间是连续的,标签数据空间会非常庞大进而制造困难大。而“强化学习”的关键思想在于,并不告诉算法对于每个输入的正确输出(事实上也做不到),而是指定一个“奖励函数(reward function)”,来告诉算法执行的结果如何,“强化学习”算法的工作就是自动找出“最大化奖励”的动作。也就是,在训练时只给出“奖励函数(reward function)”,而不是最佳动作。这可以在设计系统时具有更多的灵活性。比如对于“直升机控制”来说,可以设置奖励为:
- 正向反馈(positive reward):直升机飞行稳定时,+1分。
- 负向反馈(negative reward):直升机坠毁,-1000分。
“强化学习”的应用场景有:
- 机器人控制。比如直升机特技飞行、机器狗跨越障碍等。
- 工厂优化。如何安排工厂中流程来最大限度的提升 吞吐量/效率。
- 金融(股票)交易。比如要想在10天内抛售100万手股票,如何效益最大化的完成股票交易。
- 玩游戏。比如挑起、国际象棋、纸牌、电子游戏等等。
尽管“强化学习”不如“有监督学习”应用广泛,目前尚未在商业界取得广泛应用,但也是机器学习算法的“支柱”之一。下面是目前“强化学习”的一些缺点:
- 很多研究成果都是针对模拟环境的,而针对“实际机器人”的“强化学习”要困难的多。
- 应用场景少。相比于“有/无监督学习”,“强化学习”的应用场景很少,目前大多数局限在机器人控制领域。
注:“强化学习”既不是“有监督学习”,也不是“无监督学习”。
1.2 强化学习示例
本节介绍几个强化学习的示例,其中“火星探测器”会在第二节反复提及。
【问题1】“火星探测器”:找出火星车在每个状态应该执行的最佳动作,直到到达“状态1”或“状态6”。
- 状态(state):假设有6个状态。每个状态可以认为是不同的地点,“状态1”或“状态6”为“任务终点(terminal state)”。下图中火星车的起始位置为“状态4”。
- 动作(action):每个状态都可以执行“向左”、“向右”两种状态。
- 奖励(reward):到达“状态1”奖励100、到达“状态6”奖励40、其他状态奖励为0。
- 折扣因子: γ = 0.5 \gamma=0.5 γ=0.5

【问题2】“直升机控制”:根据当前状态自动选择动作,以保证直升机的平稳运行。
- 状态:直升机的空间位置。
- 动作:如何移动直升机遥控上的控制杆。
- 奖励:飞行平稳+1,坠毁-1000。
- 折扣因子: γ = 0.99 \gamma=0.99 γ=0.99
【问题3】“国际象棋”【简化描述】:根据棋盘上所有棋子的位置,自动选择最佳的下一步棋。
- 状态:棋盘上所有棋子的位置。
- 动作:可能的移动方式。
- 奖励:赢了+1,胜负未分0,输了-1。
- 折扣因子: γ = 0.995 \gamma=0.995 γ=0.995
【问题4】“登月器”:控制登月器成功实现软着陆。
- 具体介绍参照3.1节。
1.3 数学符号
下面是本周会用到的一些数学符号,简单看一眼,用到的时候来查就行。
- s s s / s ⃗ \vec{s} s:机器人的当前状态。
- a a a / a ⃗ \vec{a} a:机器人在当前状态执行的动作。
- R ( s ) R(s) R(s):机器人在当前状态得到的奖励。
- s ′ s' s′:机器人执行动作 a a a 后进入的的下一状态。
- a ′ a' a′:机器人在下一状态执行的动作。
- γ \gamma γ:0~1之间,奖励的折扣因子(discount factor)。很多算法会定义为0.9左右,本周默认 γ = 0.5 \gamma=0.5 γ=0.5。
- π ( s ) = a \pi(s)=a π(s)=a:强化学习的策略,表示在“状态 s s s”下应该执行的“最佳动作 a a a”。
- p p p:0~1之间,表示机器人执行动作后,没有到达预期状态,反而由于某些随机因素到达相反状态的概率。
强化学习四大核心要素:当前状态、动作、奖励、下一状态。
注:第3节的“连续状态空间”会涉及到“向量”表示,上述只给出了“状态”和“动作”的向量形式,其余省略见上下文即可。
2. 离散状态空间的强化学习
本节通过一个简单的案例——“火星探测器”,来介绍“强化学习”中的核心数学公式和关键思想。
2.1 回报
本小节来介绍强化学习的“回报”。强化学习的“回报(return)”是每一步所获得的 “奖励(reward)”的加权和,权重就是步数幂次的“折扣因子 γ \gamma γ”,“奖励”显然取决于每一次的“动作(action)”。比如下面从“状态1”不断执行动作,最终到达任务终点“状态n”,回报为:
Return = R 1 + γ R 2 + γ 2 R 3 + . . . + γ n − 1 R n ( terminal state ) \text{Return} = R_1 + \gamma R_2 + \gamma^2 R_3 + ... + \gamma^{n-1} R_n(\text{terminal state}) Return=R1+γR2+γ2R3+...+γn−1Rn(terminal state)
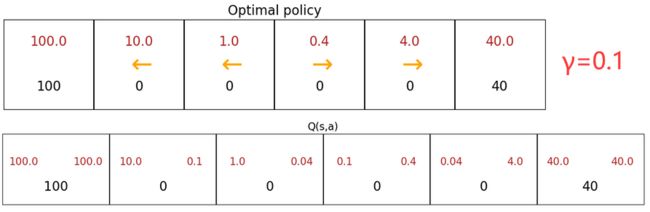
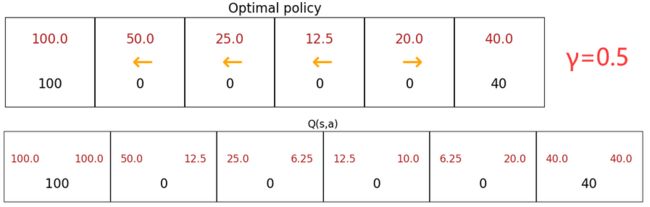
若系统中出现“负奖励”,算法会尽可能的推迟该“负奖励”。折扣因子 γ \gamma γ 越大,表示有“耐心”走向更远的“大奖励”。下图给出了折扣因子对最佳策略(黄色箭头)的影响,可以发现 γ \gamma γ 较大时,状态5的最佳策略会是更远处的“大奖励”。

2.2 策略
本节介绍强化学习如何选择“动作”,也就是强化学习算法的“策略”。“策略 π \pi π (policy/controler)”是一个“状态”到“动作”的映射函数,表示在“状态 s s s”下,为了“最大化回报”所应该执行的“最佳动作 a a a”:
π ( s ) = a \pi(s)=a π(s)=a
上述决策过程被称为“马尔可夫决策过程(Markov Decision Process, MDP)”。“马尔可夫决策过程”是指未来只取决于当前状态,而不取决于任何之前的状态。
2.3 状态-动作价值函数
整个强化学习最关键的一点就是计算“状态-动作价值函数(state-action value function)”,也称为 Q Q Q函数、 Q ∗ Q^* Q∗、最优 Q Q Q函数(optimal Q function)。“状态-动作价值函数”就是在 “当前状态 s s s” 下,执行 “某动作 a a a” 后所能获得的“最大回报”。也就是说,“某动作 a a a”不一定是当前状态的最佳动作,但执行 a a a 之后会一直执行最佳动作( γ = 0.5 \gamma=0.5 γ=0.5):
Q ( s , a ) = max ( Return ) at s after a Q(s,a) = \max(\text{Return}) \;\;\text{at}\;\; s \;\; \text{after} \;\; a Q(s,a)=max(Return)atsaftera
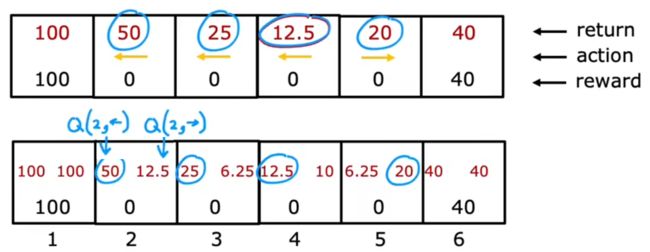
显然,在计算出所有状态下所有动作的 Q Q Q 取值后,在每个状态只需选取 Q Q Q 取值较大的“动作”,就是“最佳动作 π ( s ) = a \pi(s)=a π(s)=a”。比如上述在“状态4”,因为 Q ( 4 , ← ) > Q ( 4 , → ) Q(4,\leftarrow)>Q(4,\rightarrow) Q(4,←)>Q(4,→),所以在“状态4”应该执行最佳动作 “向左 ← \leftarrow ←”。比如上图3-3-3中( γ = 0.5 \gamma=0.5 γ=0.5):
Example 1 : Q ( 2 , → ) = R ( 2 ) + 0.5 max a ′ Q ( 3 , a ′ ) = 0 + 0.5 ⋅ 25 = 12.5 Example 2 : Q ( 4 , ← ) = R ( 4 ) + 0.5 max a ′ Q ( 3 , a ′ ) = 0 + 0.5 ⋅ 25 = 12.5 \text{Example 1 :}\quad Q(2,\rightarrow) = R(2) + 0.5\max_{a'}Q(3,a') = 0+0.5\cdot25=12.5\\ \text{Example 2 :}\quad Q(4,\leftarrow) = R(4) + 0.5\max_{a'}Q(3,a') = 0+0.5\cdot25=12.5\\ Example 1 :Q(2,→)=R(2)+0.5a′maxQ(3,a′)=0+0.5⋅25=12.5Example 2 :Q(4,←)=R(4)+0.5a′maxQ(3,a′)=0+0.5⋅25=12.5
2.4 贝尔曼方程
将前几个小节的内容总结一下,就可以给出 Q ( s , a ) Q(s,a) Q(s,a) 的计算公式——“贝尔曼方程(Bellman Equation)”,也就是在 状态 s s s 执行 动作 a a a 的最大回报=“即时奖励(immediate reward)”+下一状态的最大回报:
Bellman Equation : Q ( s , a ) = R ( s ) + γ max a ′ Q ( s ′ , a ′ ) \text{Bellman Equation :} \quad Q(s,a) = R(s) + \gamma \;\underset{a'}{\max}Q(s',a') Bellman Equation :Q(s,a)=R(s)+γa′maxQ(s′,a′)
- s s s:当前状态。
- a a a:在当前状态执行的动作。
- R ( s ) R(s) R(s):在当前状态得到的即时奖励。
- s ′ s' s′:执行动作 a a a 后进入的的下一状态。
- a ′ a' a′:在下一状态 s ′ s' s′ 执行的动作。
- γ \gamma γ:折扣因子。
2.5 随机环境(可选)
本节介绍“随机马尔可夫决策过程(Stochastic Markov Decision Processes)”。和前面内容的区别是,实际中机器并不总是可靠,比如命令“火星车”从“状态3”执行“动作向左”,大多数情况都会如预期到达“状态2”,但是也可能因为岩石滑坡、沙暴、车轮打滑等小概率随机事件,导致其到达“状态4”。这种情况下,我们就需要定义“出错概率 p p p”,来描述到达相反状态的概率。此时,由于整个过程是随机的,我们就不能单纯地追求“最大化回报”,而是要追求“最大化回报的期望”。于是“随机环境”下的“贝尔曼方程”更改为:
(Stochastic) Bellman Equation : Q ( s , a ) = R ( s ) + γ E [ max a ′ Q ( s ′ , a ′ ) ] \text{(Stochastic) Bellman Equation :} \quad Q(s,a) = R(s) + \gamma\; E\left[\underset{a'}{\max}Q(s',a')\right] (Stochastic) Bellman Equation :Q(s,a)=R(s)+γE[a′maxQ(s′,a′)]
老师在视频中给出的求解期望的方法时暴力穷举,不断模拟出所有的可能,最后用平均值表示期望。但显然还有更聪明的方法没介绍。下面是在“jupyter notebook”中的仿真,说明了“出错概率”对最佳决策的影响:
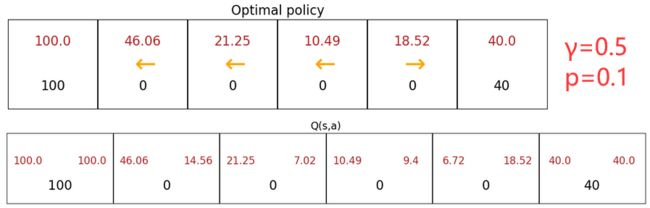
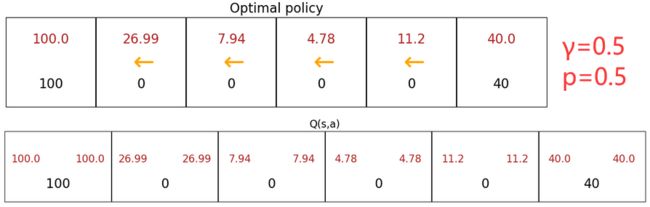
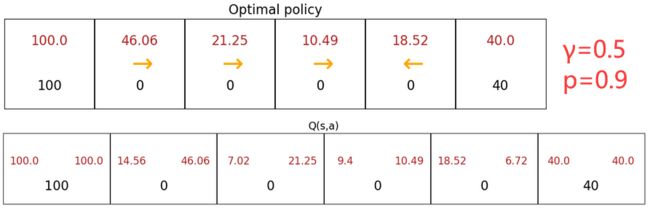
- “出错概率”的引入,会减小所有的回报。
- 【上左图】较小的“出错概率”不会改变最佳策略。
- 【上右图】较大的“出错概率”会使得最佳策略完全相反,相当于反向操作火星车。
- 【上中图】随机越接近0.5,火星车的移动越趋于随机(不受控制)。 p = 0.5 p=0.5 p=0.5 时不存在最佳策略,因为指定火星车向哪走都一样,可以看到每个状态的Q函数完全相同。这种情况形象来说就是“那还玩个集贸啊?”
本节 Quiz:
You are using reinforcement learning to control a four legged robot. The position of the robot would be its _____?
√ state
× reward
× action
× returnYou are controlling a Mars rover. You will be very very happy if it gets to state 1 (significant scientific discovery), slightly happy if it gets to state 2 (small scientific discovery), and unhappy if it gets to state 3 (rover is permanently damaged). To reflect this, choose a reward function so that:
× R(1)< R(2)< R(3), where R(1) and R(2) are negative and R(3) is positive.
√ R(1)> R(2)> R(3), where R(1) and R(2) are positive and R(3) is negative.
× R(1)> R(2)> R(3), where R(1), R(2) and R(3) are negative.
× R(1)> R(2)> R(3), where R(1), R(2) and R(3) are positive.You are using reinforcement learning to fly a helicopter. Using a discount factor of 0.75, your helicopter starts in some state and receives rewards -100 on the first step, -100 on the second step, and 1000 on the third and final step (where it has reached a terminal state). What is the return?
√ − 100 − 0.75 ∗ 100 + 0.7 5 2 ∗ 1000 -100- 0.75*100+ 0.75^2*1000 −100−0.75∗100+0.752∗1000
× − 0.25 ∗ 100 − 0.2 5 2 ∗ 100 + 0.2 5 3 ∗ 1000 -0.25* 100- 0.25^2*100+ 0.25^3*1000 −0.25∗100−0.252∗100+0.253∗1000
× − 100 − 0.25 ∗ 100 + 0.2 5 2 ∗ 1000 -100- 0.25*100+ 0.25^2*1000 −100−0.25∗100+0.252∗1000
× − 0.75 ∗ 100 − 0.7 5 2 ∗ 100 + 0.75 ∗ 3 ∗ 1000 -0.75*100- 0.75^2*100 + 0.75*3*1000 −0.75∗100−0.752∗100+0.75∗3∗1000Which of the fllowing accurately describes the state-action value function Q ( s , a ) Q(s, a) Q(s,a)?
√ It is the return if you start from state s s s, take action a a a (once), then behave optimally after that.
× It is the return if you start from state s s s and repeatedly take action a a a.
× It is the return if you start from state s s s and behave optimally.
× It is the immediate reward if you start from state s s s and take action a a a (once).You are controlling a robot that has 3 actions: ← \leftarrow ←(left), → \rightarrow →(right) and STOP. From a given state s s s, you have computed Q ( s , ← ) = − 10 Q(s,\leftarrow)=-10 Q(s,←)=−10, Q ( s , → ) = − 20 Q(s,\rightarrow)=-20 Q(s,→)=−20, Q ( s , STOP ) = 0 Q(s, \text{STOP})=0 Q(s,STOP)=0. What is the optimal action to take in state s s s?
√ STOP
× ←(left)
× →(right)
× Impossible to tell
3. 连续状态空间的强化学习
之前我们介绍的场景只有6个状态,但很多实际应用的状态空间是连续的,于是状态的数量会非常大。此时我们就不可能手算 Q Q Q 函数,而是使用神经网络来进行拟合(DQN算法)。下面就来介绍。
3.1 问题示例——登月器
很多机器人控制的实际应用都有连续的状态空间。在之前的火星车问题中,我们将问题简化成6个状态,每个状态表示一个地点。但实际上我们想做的是控制火星车在地面上的移动,所以我们应该俯瞰火星车,将地面看成二维坐标,火星车的状态应该包括:位置 [ x , y ] [x,y] [x,y](二维坐标)、角度 θ \theta θ、运动速度 [ x ˙ , y ˙ ] [\dot{x},\dot{y}] [x˙,y˙](两个方向的速度)、偏转速度 θ ˙ \dot{\theta} θ˙共6个变量:
s ⃗ = [ x , y , θ , x ˙ , y ˙ , θ ˙ ] T \vec{s} = [x,y,\theta,\dot{x},\dot{y},\dot{\theta}]^T s=[x,y,θ,x˙,y˙,θ˙]T
另外,火星车的移动可以看成是二维平面的运动,而直升机的运动则是在三维空间的运动。于是直升机的状态应该包括:位置 [ x , y , z ] [x,y,z] [x,y,z]、姿态信息 [ ϕ , θ , ω ] [\phi,\theta,\omega] [ϕ,θ,ω]、位置变化速度 [ x ˙ , y ˙ , z ˙ ] [\dot{x},\dot{y},\dot{z}] [x˙,y˙,z˙]、姿态变化的角速度 [ ϕ ˙ , θ ˙ , ω ˙ ] [\dot{\phi},\dot{\theta},\dot{\omega}] [ϕ˙,θ˙,ω˙]共12个变量:
s ⃗ = [ x , y , z , ϕ , θ , ω , x ˙ , y ˙ , z ˙ , ϕ ˙ , θ ˙ , ω ˙ ] T \vec{s} = [x,y,z,\;\;\phi,\theta,\omega,\;\;\dot{x},\dot{y},\dot{z},\;\;\dot{\phi},\dot{\theta},\dot{\omega}]^T s=[x,y,z,ϕ,θ,ω,x˙,y˙,z˙,ϕ˙,θ˙,ω˙]T
注:“姿态信息”的三维向量分别表示滚动(roll)、俯仰(pitch)、偏航(yaw)的角度,可以唯一确定刚体的姿态。
于是我们对“火星车探测”问题进行改进,来使用“登月器”这个二维连续空间问题进行举例。下面是问题介绍:
【问题1】“登月器”:控制登月器的运动,使其成功“立着”降落在两个黄旗之间(如下图)。
- 状态:是二维平面的小游戏,登月器的状态包括8种变量 s ⃗ = [ x , y , x ˙ , y ˙ , θ , θ ˙ , l , r ] T \vec{s}=[x,y,\dot{x},\dot{y},\theta,\dot{\theta},l,r]^T s=[x,y,x˙,y˙,θ,θ˙,l,r]T。
- [ x , y ] [x,y] [x,y]:连续取值,表示登月器的二维坐标。
- x ˙ , y ˙ \dot{x},\dot{y} x˙,y˙:连续取值,表示登月器在两个方向的速度。
- θ \theta θ:连续取值,表示登月器的偏转角度。
- θ ˙ \dot{\theta} θ˙:连续取值,表示登月器的偏转速度。
- [ l , r ] [l,r] [l,r]:二进制取值,分别表示左、右支撑脚是否着地。帮助确认登月器是否为“倒栽葱”或者“躺着”着陆的。
- 动作:包括四个动作,什么都不做/向左点火/向右点火/向下点火。
- 什么都不做(nothing),登月器由于重力自然下坠。
- 向左点火(fire left),点燃左推进器,登月器向右移动。
- 向右点火(fire right),点燃右推进器,登月器向左移动。
- 向下点火(fire main),点燃主推进器,减缓登月器的下降速度。
- 奖励:考虑到整个着陆过程,定义以下7种奖励。前4个都是降落后判定,后3个是降落过程中持续判定。
- 【+100~+140】别管是“立着”/“倒栽葱”/“躺着”,只要到达两黄旗之间就给奖励。离中心越近奖励越多。
- 【-100】不管降落在哪里,只要不是“立着”降落,就判定为“坠毁”给惩罚。
- 【+100】不管降落在哪里,只要成功实现“立着”降落(软着陆)就给奖励。
- 【+10】不管降落在哪里,只要有一个支撑腿着地,就+10;两个就+20。
- 【额外奖励】降落过程中,水平方向离两黄旗中心越近就给一点小奖励。
- 【-0.3】为了节省燃料,每点燃一次主推进器(向下点火),就给一点惩罚。
- 【-0.03】为了节省燃料,每点燃一次左/右推进器,就给一点惩罚。
- 折扣因子:对于登月器来说,通常会令折扣因子较大,如 γ = 0.985 \gamma=0.985 γ=0.985。

上述奖励函数算是一个“中等复杂”的定义,花时间仔细定义“奖励”是合理的。因为即使看上去有点复杂,也比手动确定每个状态的最佳动作要简单许多。
3.2 DQN算法:拟合Q函数
在上一大节的介绍中, Q Q Q函数对于最佳动作的选择至关重要。对于离散状态空间来说,可以手动计算甚至穷举;但对于连续状态空间来说, Q Q Q函数取值连续且几乎没有显式表达式,于是需要训练神经网络来拟合 Q Q Q函数。也就是根据输入 ( s ⃗ , a ⃗ ) (\vec{s},\vec{a}) (s,a),计算输出 Q ( s ⃗ , a ⃗ ) Q(\vec{s},\vec{a}) Q(s,a),神经网络的结构如下:

- 输入层:12维向量,包括状态向量 s ⃗ \vec{s} s (长度为9) + 动作向量 a ⃗ \vec{a} a (4个动作的独热码)。
- 中间层:不妨定义两个中间层,每个中间层都有64个神经元。
- 输出层:Q函数的输出,也就是在 状态 s ⃗ \vec{s} s 下采取 动作 a ⃗ \vec{a} a 所能得到的最大回报。
注意:神经网络最开始的输出“y”并没有什么意义,只是随机初始化的参数。
那如何得到最开始的训练集呢?答案是利用神经网络的初始化参数。比如在某个时刻 i i i 可以得到下面所示的“四要素” ( s ⃗ ( i ) , a ⃗ ( i ) , R ( s ⃗ ( i ) ) , s ⃗ ′ ( i ) ) (\vec{s}^{(i)},\vec{a}^{(i)},R(\vec{s}^{(i)}),\vec{s}'^{(i)}) (s(i),a(i),R(s(i)),s′(i)),根据“四要素”可以直接得到是神经网络的输入 x ⃗ ( i ) \vec{x}^{(i)} x(i);而由于神经网络有随机初始化参数,所以可以计算出在下一状态 s ⃗ ′ ( i ) \vec{s}'^{(i)} s′(i) 下所有的动作的 Q Q Q值,选出最大的便可以计算出神经网络的输出 y ( i ) y^{(i)} y(i)。于是就计算出来单个训练样本 ( x ⃗ ( i ) , y ( i ) ) (\vec{x}^{(i)},y^{(i)}) (x(i),y(i))。不断重复这个过程(比如10000次),便可得到大量的训练集:
( s ⃗ ( i ) , a ⃗ ( i ) , R ( s ⃗ ( i ) ) , s ⃗ ′ ( i ) ) ⟶ { x ⃗ ( i ) = ( s ⃗ ( i ) , a ⃗ ( i ) ) y ( i ) = R ( s ⃗ ( i ) ) + γ max a ⃗ ′ Q ( s ⃗ ′ ( i ) , a ⃗ ′ ) ⏟ Neural Network \begin{aligned} (\vec{s}^{(i)},\vec{a}^{(i)},R(\vec{s}^{(i)}),\vec{s}'^{(i)})\;\longrightarrow \left\{\begin{aligned} & \vec{x}^{(i)}=(\vec{s}^{(i)}, \vec{a}^{(i)})\\ & y^{(i)} = R(\vec{s}^{(i)}) + \gamma\;\max_{\vec{a}'}\underbrace{Q(\vec{s}'^{(i)},\vec{a}')}_{\text{Neural Network}} \end{aligned}\right. \end{aligned} (s(i),a(i),R(s(i)),s′(i))⟶⎩ ⎨ ⎧x(i)=(s(i),a(i))y(i)=R(s(i))+γa′maxNeural Network Q(s′(i),a′)
和前面“有监督学习”的神经网络不同的地方在于,“强化学习”的神经网络迭代更新一次需要使用两次神经网络。一次用于计算训练样本,一次用于更新参数。这个训练过程虽然看起来优点玄学,但能逐渐迭代出理想参数,但显然比“有监督学习”更慢。
具体是算法如下:
完整的DQN算法框架(Deep Q-Network):
- 初始化神经网络参数,作为Q函数的拟合。
- 不断重复{
1. 计算“四要素”。采取动作,计算得到10000个样本 ( s ⃗ , a ⃗ , R ( s ⃗ ) , s ⃗ ′ ) (\vec{s},\vec{a},R(\vec{s}),\vec{s}') (s,a,R(s),s′)。(Replay Buffer)
2. 训练神经网络,迭代设定次数{
1. 计算训练集。利用神经网络计算所有训练样本 x ⃗ = ( s ⃗ , a ⃗ ) \vec{x}=(\vec{s}, \vec{a}) x=(s,a)、 y = R ( s ⃗ ) + γ max a ⃗ ′ Q ( s ⃗ ′ , a ⃗ ′ ) y = R(\vec{s}) + \gamma\;\max_{\vec{a}'}Q(\vec{s}',\vec{a}') y=R(s)+γmaxa′Q(s′,a′)。
2. 训练神经网络参数。使新的神经网络 Q n e w ≈ y Q_{new}\approx y Qnew≈y。
}
3. 更新神经网络参数, Q = Q n e w Q=Q_{new} Q=Qnew。
}
3.3 算法改进:改进的神经网络架构
我们使用神经网络来拟合 Q ( s ⃗ , a ⃗ ) Q(\vec{s},\vec{a}) Q(s,a)。但在上一节中,对于每个状态 s ⃗ \vec{s} s,我们都需要推理4次来逐个计算所有动作对应的 Q Q Q值,并挑出最大值。这显然很麻烦,我们可以省略这一重复性的工作,直接令神经网络输出当前状态 s ⃗ \vec{s} s 下所有动作对应的 Q Q Q值,此时我们推理1次便可以得到当前状态 s ⃗ \vec{s} s 所有的Q值:
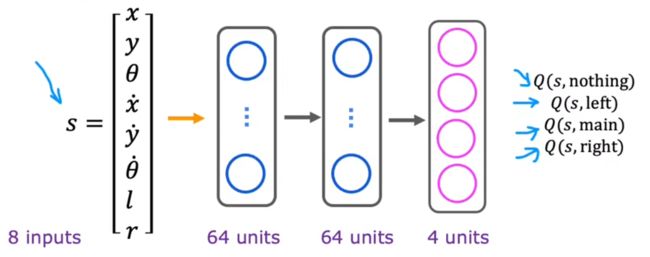
按照上面这种结构改进,会使得神经网络更加高效。
3.4 算法改进: ε \varepsilon ε-贪婪策略、小批量、软更新
而对于算法我们也有一些改进的小技巧(黑色加粗),下面来一一介绍:
完整的DQN算法框架(Deep Q-Network):
- 初始化神经网络参数,作为Q函数的拟合。
- 不断重复{
1. 计算“四要素”。使用“ ε \varepsilon ε-贪婪策略”采取动作,计算得到10000个样本 ( s ⃗ , a ⃗ , R ( s ⃗ ) , s ⃗ ′ ) (\vec{s},\vec{a},R(\vec{s}),\vec{s}') (s,a,R(s),s′)。(Replay Buffer)
2. 训练神经网络,迭代设定次数{
使用“小批量”策略(1000个样本/批),重复所有批:{
1. 计算当前批的训练样本, x ⃗ = ( s ⃗ , a ⃗ ) \vec{x}=(\vec{s}, \vec{a}) x=(s,a)、 y = R ( s ⃗ ) + γ max a ⃗ ′ Q ( s ⃗ ′ , a ⃗ ′ ) y = R(\vec{s}) + \gamma\;\max_{\vec{a}'}Q(\vec{s}',\vec{a}') y=R(s)+γmaxa′Q(s′,a′)。
2. 使用当前批训练神经网络参数,得到新的神经网络 Q n e w ≈ y Q_{new}\approx y Qnew≈y。
}
}
4. “软更新”神经网络参数,比如 Q = 0.1 Q n e w + 0.9 Q Q=0.1\;Q_{new} + 0.9\;Q Q=0.1Qnew+0.9Q。
}
ε \varepsilon ε-贪婪策略
ε \varepsilon ε-贪婪策略( ε \varepsilon ε- greedy policy)可以避免神经网络永远也不会尝试某个动作。因为神经网络初始化的参数不准确,若在拟合 Q ( s ⃗ , a ⃗ ) Q(\vec{s},\vec{a}) Q(s,a) 时总是直接选取 Q Q Q值最大的动作,可能会导致某些动作永远也尝试不到(万一是好动作呢)。所以对动作的选取做出改进:
- 【原始方法❌】在每一个状态选取下一个动作时,总是选取当前神经网络输出最大 Q Q Q值的动作。但由于神经网络一开始的初始化参数不好,可能会导致其永远不会尝试好动作。
- 【 ε \varepsilon ε-贪婪策略✅】每次进行选取动作时(假设 ε = 0.05 \varepsilon=0.05 ε=0.05),以 1 − ε 1-\varepsilon 1−ε 的概率选取最大化 Q Q Q值的动作(greedy/exploitation)、以 ε \varepsilon ε 的概率随机选择动作(exploration)。在神经网络初始训练时,可以令 ε \varepsilon ε 较大,随着训练的进行逐步减小,比如从 1.0 1.0 1.0 逐步减小到 0.01 0.01 0.01。
注:由于有 1 − ε 1-\varepsilon 1−ε 的概率都是“贪婪的”,貌似“ ε \varepsilon ε-贪婪策略”这个名字并不恰当,但这是历史遗留问题。
上述也就是说, ε \varepsilon ε-贪婪策略是“贪婪(exploitation)”和“探索(exploration)”之间的折衷,通过偶尔不选取最佳策略为代价,来学习更多的信息。
小批量
“小批量(mini-batches)”是一种用于加速神经网络训练的方法,应用该思想也可以加速“线性回归”、“逻辑回归”。假设训练集中有一亿个训练样本,此时计算代价函数时,若直接计算所有样本的均方误差会使得计算量非常庞大。所以对单次迭代过程进行改进:
- 【原始方法❌】计算所有训练样本的均方误差,然后更新一小步。梯度下降方向相对准确,但计算成本非常大。
- 【小批量✅】将一亿个训练样本拆分成1000个为一批(bitch),然后对每一批,都计算一次均方误差并更新参数。梯度下降的过程相对“混乱”,但也会逐渐趋向代价极小点,并且计算成本大大降低。
软更新
“软更新(soft updates)”可以避免神经网络性能突然变差,进而帮助算法更好的收敛。所以对神经网络参数的更新做出改进:
- 【原始方法❌】直接更新。假设新的神经网络碰巧性能更差,那么直接更新会导致神经网络性能突然变差。
- 【软更新✅】比如设置 Q = 0.1 Q n e w + 0.9 Q Q=0.1\;Q_{new} + 0.9\;Q Q=0.1Qnew+0.9Q,可以避免“强化学习”的参数振荡或具有其他不良特性。
最后总结一下本小节,相比于“有监督学习”,“强化学习”对于参数的选取更加苛刻,这也是为什么“强化学习”还不成熟的原因。比如“有监督学习”中,即使“学习率 α \alpha α”的选取较小,可能可只是多花三倍时间进行训练;而在“强化学习”中,若“ ε \varepsilon ε”等参数选取不合适,那可能会多花上10倍甚至100倍时间进行训练。
3.5 代码示例-登月器
“登月器”问题其实已经由OpenAI团队开发好封装在“gymnasium包”中,并且还包括“小车上山”、“双足行走”、“汽车竞速”等一系列强化学习实验。老师给出的原版代码中使用pyvirtualdisplay渲染,这在Windows平台很难用(见下面的bug1)。本节就来使用“gymnasium包+TensorFlow”来加载和训练强化学习场景。
问题要求:使用“gymnasium包+TensorFlow”来加载和训练“登月器”。
代码结构:
- 函数1:计算一批仿真的代价,先计算 y y y,在计算均方误差。
- 函数2:定义代价函数的计算过程(函数1),并更新网络参数。
- 主函数:见注释。
- utils.py:一些老师写好的杂散的函数。见“课程资料”。
注:本实验来自本周的练习“C3_W3_A1_Assignment.ipynb”,我修改后的原版notebook见“Gymnasium_C3_W3_A1.ipynb(161KB)”。但是下面的代码具有连续性,可以更好的理解整个工程的运行原理。
注:代码中使用了“ ε \varepsilon ε-贪婪策略”、“小批量”。但没有使用“软更新”,而是每隔几次仿真更新一次网络。
Jupyter notebook的bug1:
运行pyvirtualdisplay库中的Display()函数时报错FileNotFoundError: [WinError 2] 系统找不到指定的文件。
分析问题
因为pyvirtualdisplay库是专门给Linux用的,所以在Windows用不了。但是gym是OpenAI团队的库,都2023年了早就升级成了gymnasium非常强大,无需调用别的库即可自己实现渲染。所以下面舍弃pyvirtualdisplay、PIL.Image,然后安装gymnasium并修改代码即可。
解决问题:步骤一:安装gymnasium
conda install swigpip install gymnasium[all]- 注意后续再报错缺少什么安装什么。
步骤二:更改代码
- 参考我下面的代码即可运行。主要是将
pyvirtualdisplay、PIL.Image全部注释掉;再注意env.step(action)、env.reset()函数返回值需要修改。参考文章:
- gymnasium官网中的“Environments”一节给出了所有可选的强化学习案例环境ID。
- CSDN——“解决安装强化学习库gymnasium,box2d安装报错的问题”。
- CSDN——“gym包更新升级到0.26.2版本后炼丹炉的测试代码”。
- CSDN——“强化学习笔记:Gym入门–从安装到第一个完整的代码示例”。(强化学习笔记总目录)
- CSDN——“强化学习实战——OpenAI Gym环境配置+实战演示(win10)”。
Jupyter notebook的bug2:
最后创建视频时总是报错must be real number, not NoneType
解决问题:
- 先卸载:
pip uninstall moviepy- 再重安:
pip install moviepy参考文章:
- gymnasium官网中的“gymnasium.wrappers.RecordVideo()”函数介绍。
- stack overflow——“Getting “TypeError: must be real number, not NoneType” whenever trying to run write_videofile to a clip in moviepy”。
下面是代码和输出结果:
utils.py
import base64
import random
from itertools import zip_longest
import imageio
import IPython
import matplotlib.pyplot as plt
import matplotlib.ticker as mticker
import numpy as np
import pandas as pd
import tensorflow as tf
from statsmodels.iolib.table import SimpleTable
SEED = 0 # seed for pseudo-random number generator
MINIBATCH_SIZE = 64 # mini-batch size
TAU = 1e-3 # soft update parameter
E_DECAY = 0.995 # ε decay rate for ε-greedy policy
E_MIN = 0.01 # minimum ε value for ε-greedy policy
random.seed(SEED)
def get_experiences(memory_buffer):
experiences = random.sample(memory_buffer, k=MINIBATCH_SIZE)
states = tf.convert_to_tensor(np.array([e.state for e in experiences if e is not None]),dtype=tf.float32)
actions = tf.convert_to_tensor(np.array([e.action for e in experiences if e is not None]), dtype=tf.float32)
rewards = tf.convert_to_tensor(np.array([e.reward for e in experiences if e is not None]), dtype=tf.float32)
next_states = tf.convert_to_tensor(np.array([e.next_state for e in experiences if e is not None]),dtype=tf.float32)
done_vals = tf.convert_to_tensor(np.array([e.done for e in experiences if e is not None]).astype(np.uint8),
dtype=tf.float32)
return (states, actions, rewards, next_states, done_vals)
def check_update_conditions(t, num_steps_upd, memory_buffer):
"""
判断是否更新网络参数:
1. 并不是每次仿真完都会更新一次网络参数,而是仿真到达一定次数才更新,比如每4次仿真更新一次。
2. 后者重放缓冲区满了,要立刻更新参数。
:param t: 当前仿真次数
:param num_steps_upd: 每”num_steps_upd“次更新一次。
:param memory_buffer: 重放缓冲区
:return:更新网络参数的标志位
"""
if (t + 1) % num_steps_upd == 0 and len(memory_buffer) > MINIBATCH_SIZE:
return True
else:
return False
def get_new_eps(epsilon):
return max(E_MIN, E_DECAY*epsilon)
def get_action(q_values, epsilon=0):
if random.random() > epsilon:
return np.argmax(q_values.numpy()[0])
else:
return random.choice(np.arange(4))
def update_target_network(q_network, target_q_network):
for target_weights, q_net_weights in zip(target_q_network.weights, q_network.weights):
target_weights.assign(TAU * q_net_weights + (1.0 - TAU) * target_weights)
def plot_history(reward_history, rolling_window=20, lower_limit=None,
upper_limit=None, plot_rw=True, plot_rm=True):
if lower_limit is None or upper_limit is None:
rh = reward_history
xs = [x for x in range(len(reward_history))]
else:
rh = reward_history[lower_limit:upper_limit]
xs = [x for x in range(lower_limit,upper_limit)]
df = pd.DataFrame(rh)
rollingMean = df.rolling(rolling_window).mean()
plt.figure(figsize=(10,7), facecolor='white')
if plot_rw:
plt.plot(xs, rh, linewidth=1, color='cyan')
if plot_rm:
plt.plot(xs, rollingMean, linewidth=2, color='magenta')
text_color = 'black'
ax = plt.gca()
ax.set_facecolor('black')
plt.grid()
# plt.title("Total Point History", color=text_color, fontsize=40)
plt.xlabel('Episode', color=text_color, fontsize=30)
plt.ylabel('Total Points', color=text_color, fontsize=30)
yNumFmt = mticker.StrMethodFormatter('{x:,}')
ax.yaxis.set_major_formatter(yNumFmt)
ax.tick_params(axis='x', colors=text_color)
ax.tick_params(axis='y', colors=text_color)
plt.show()
def display_table(initial_state, action, next_state, reward, done):
action_labels = ["Do nothing", "Fire right engine", "Fire main engine", "Fire left engine"]
# Do not use column headers
column_headers = None
with np.printoptions(formatter={'float': '{:.3f}'.format}):
table_info = [("Initial State:", [f"{initial_state}"]),
("Action:", [f"{action_labels[action]}"]),
("Next State:", [f"{next_state}"]),
("Reward Received:", [f"{reward:.3f}"]),
("Episode Terminated:", [f"{done}"])]
# Generate table
row_labels, data = zip_longest(*table_info)
table = SimpleTable(data, column_headers, row_labels)
return table
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
'''.format(b64.decode())
return IPython.display.HTML(tag)
main.py
import time
from collections import deque, namedtuple
import numpy as np
import logging
import imageio
# 渲染画面的库
# import PIL.Image
# from pyvirtualdisplay import Display
# TensorFlow库
import tensorflow as tf
import keras
from keras.models import Sequential
from keras.layers import Dense, Input
from keras.losses import MSE
from keras.optimizers import Adam
# OpenAI的强化学习环境
# import gym
import gymnasium
import gymnasium as gym
# 额外的文件
import utils
####################################自定义函数####################################
def compute_loss(experiences, gamma, q_network, target_q_network):
"""
Calculates the loss.
Args:
experiences: (tuple) tuple of ["state", "action", "reward", "next_state", "done"] namedtuples
gamma: (float) The discount factor.
q_network: (tf.keras.Sequential) Keras model for predicting the q_values
target_q_network: (tf.keras.Sequential) Karas model for predicting the targets
Returns:
loss: (TensorFlow Tensor(shape=(0,), dtype=int32)) the Mean-Squared Error between
the y targets and the Q(s,a) values.
"""
# Unpack the mini-batch of experience tuples
states, actions, rewards, next_states, done_vals = experiences
# Compute max Q^(s,a)
max_qsa = tf.reduce_max(target_q_network(next_states), axis=-1)
# Set y = R if episode terminates, otherwise set y = R + γ max Q^(s,a).
y_targets = rewards + (1 - done_vals) * gamma * max_qsa
# Get the q_values
q_values = q_network(states)
q_values = tf.gather_nd(q_values, tf.stack([tf.range(q_values.shape[0]),
tf.cast(actions, tf.int32)], axis=1))
# Compute the loss
loss = MSE(y_targets, q_values)
return loss
@tf.function # 将下面的函数放到TensorFlow中计算
def agent_learn(experiences, gamma):
"""
Updates the weights of the Q networks.
Args:
experiences: (tuple) tuple of ["state", "action", "reward", "next_state", "done"] namedtuples
gamma: (float) The discount factor.
"""
# Calculate the loss
with tf.GradientTape() as tape:
loss = compute_loss(experiences, gamma, q_network, target_q_network)
# Get the gradients of the loss with respect to the weights.
gradients = tape.gradient(loss, q_network.trainable_variables)
# Update the weights of the q_network.
optimizer.apply_gradients(zip(gradients, q_network.trainable_variables))
# update the weights of target q_network
utils.update_target_network(q_network, target_q_network)
####################################主函数##################################
if __name__ == "__main__":
# 定义参数
num_episodes = 2000 # 总仿真次数,这个数字可以非常大
max_num_timesteps = 1000 # 每次仿真的最大时长(动作总数)
NUM_STEPS_FOR_UPDATE = 4 # 神经网络参数的更新频率
GAMMA = 0.995 # 计算回报的折扣因子
epsilon = 1.0 # ε的初始值(ε-贪婪策略)
ALPHA = 1e-3 # 学习率-Adam算法
MEMORY_SIZE = 100_000 # 重放缓冲区的大小
memory_buffer = deque(maxlen=MEMORY_SIZE) # 创建重放缓冲区
num_p_av = 100 # 查看倒数多少次仿真的回报平均值
total_point_history = [] # 记录所有仿真的总回报
# 存储每次执行动作后的信息
experience = namedtuple("Experience", field_names=["state", "action", "reward", "next_state", "done"])
# 加载强化学习场景
env = gym.make('LunarLander-v2', render_mode='human') # 加载场景
initial_state, _ = env.reset() # 场景初始化
state_size = env.observation_space.shape # 状态向量的长度(DQN输入的长度)
num_actions = env.action_space.n # 动作的总数:登月器为4
print(f"当前场景中,状态向量的长度为 {state_size},可执行的动作数量为{num_actions}。")
# 运行一个动作
action = 0 # 先随便选择一个动作
next_state, reward, done, truncated, info = env.step(action)
print("\n运行一个动作:")
with np.printoptions(formatter={'float': '{:.3f}'.format}):
print("Initial State:", initial_state)
print("Action:", action)
print("Next State:", next_state)
print("Reward Received:", reward)
print("Episode Terminated:", done)
print("Info:", info)
# 定义拟合”Q函数“的神经网络
tf.random.set_seed(utils.SEED) # 保证神经网络初始化参数相同
# q_network用于计算Q值
q_network = Sequential([
Input(shape=state_size),
Dense(64, activation='relu'),
Dense(64, activation='relu'),
Dense(num_actions, activation='linear')
])
# target_q_network用于更新迭代
target_q_network = Sequential([
Input(shape=state_size), # 输入特征的长度
Dense(64, activation='relu'),
Dense(64, activation='relu'),
Dense(num_actions, activation='linear')
])
# 两者的初始化参数相同
target_q_network.set_weights(q_network.get_weights())
# 优化器
optimizer = keras.optimizers.Adam(learning_rate=ALPHA)
# 开始迭代
start = time.time()
for i in range(num_episodes):
# 初始化单次仿真
state, _ = env.reset()
total_points = 0 # 本次仿真的总分数
# 进行单次仿真
for t in range(max_num_timesteps):
# 使用ε-贪婪策略,根据当前状态state选择下一动作action
state_qn = np.expand_dims(state, axis=0) # 将一维的状态向量state扩展成二维矩阵state_qn
q_values = q_network(state_qn) # 计算当前状态state_qn的四个Q值
action = utils.get_action(q_values, epsilon) # 使用ε-贪婪策略选择下一动作
# 计算当前状态的奖励reward,然后执行下一动作action计算下一状态next_state
next_state, reward, done, _, _ = env.step(action)
# 使用元组存储四要素(S,A,R,S')到”Replay Buffer“,并且捎带了”终止状态标识done“
memory_buffer.append(experience(state, action, reward, next_state, done))
# 每”num_steps_upd“次、或者重放缓冲区满,才更新神经网络参数
update = utils.check_update_conditions(t, NUM_STEPS_FOR_UPDATE, memory_buffer)
if update:
# 从缓冲区取出一个”小批量“的”四要素“数据
experiences = utils.get_experiences(memory_buffer)
# 计算目标值y,然后使用Adam算法更新网络参数
agent_learn(experiences, GAMMA)
# 更新到下一状态,若到达终止状态则跳出本次仿真
state = next_state.copy()
total_points += reward
if done:
break
# 计算最新范围的平均总回报,并判定是否完成仿真:最新范围的平均总回报大于200分
total_point_history.append(total_points)
av_latest_points = np.mean(total_point_history[-num_p_av:])
if av_latest_points >= 200.0:
print(f"\n\nEnvironment solved in {i + 1} episodes!")
q_network.save('lunar_lander_model.h5')
break
# 减小ε的大小
epsilon = utils.get_new_eps(epsilon)
# 打印仿真信息
if (i + 1) % num_p_av == 0:
print(f"\rEpisode {i + 1} | Total point average of the last {num_p_av} episodes: {av_latest_points:.2f}")
else:
print(f"\rEpisode {i + 1} | Total point average of the last {num_p_av} episodes: {av_latest_points:.2f}",
end="") # 仿真进度
# 打印仿真总时间
tot_time = time.time() - start
print(f"\nTotal Runtime: {tot_time:.2f} s ({(tot_time / 60):.2f} min)")
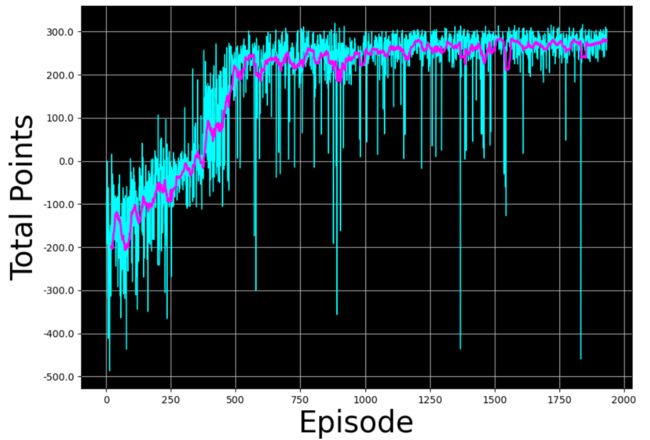
# 画出所有仿真的总回报的变化趋势
utils.plot_history(total_point_history)
# Suppress warnings from imageio
# logging.getLogger().setLevel(logging.ERROR)
# 查看最新的训练效果并保存成视频
video_folder = './videos' # 视频存储路径
env = gym.make("LunarLander-v2", render_mode="rgb_array")
video_env = gymnasium.wrappers.RecordVideo(env, video_folder)
done = False
state, _ = video_env.reset()
num = 0
while not done:
state = np.expand_dims(state, axis=0)
q_values = q_network(state)
action = np.argmax(q_values.numpy()[0])
state, reward, done, _, _ = video_env.step(action)
# 最后一行代码只是显示视频,只在jupyter notebook起作用
utils.embed_mp4(video_folder+'/rl-video-episode-0.mp4') # 视频文件名固定不变
终端输出:
当前场景中,状态向量的长度为 (8,),可执行的动作数量为4。
运行一个动作:
Initial State: [0.004 1.422 0.368 0.501 -0.004 -0.083 0.000 0.000]
Action: 0
Next State: [0.007 1.433 0.368 0.476 -0.008 -0.082 0.000 0.000]
Reward Received: 0.6011367852468368
Episode Terminated: False
Info: {}
Episode 100 | Total point average of the last 100 episodes: -150.38
Episode 200 | Total point average of the last 100 episodes: -100.94
Episode 300 | Total point average of the last 100 episodes: -44.81
Episode 400 | Total point average of the last 100 episodes: 57.77
Episode 500 | Total point average of the last 100 episodes: 135.13
Episode 598 | Total point average of the last 100 episodes: 198.41
Environment solved in 599 episodes!
Total Runtime: 6827.24 s (113.79 min)
Moviepy - Building video C:\Users\14751\Desktop\LunarLander\videos\rl-video-episode-0.mp4.
Moviepy - Writing video C:\Users\14751\Desktop\LunarLander\videos\rl-video-episode-0.mp4
Moviepy - Done !
Moviepy - video ready C:\Users\14751\Desktop\LunarLander\videos\rl-video-episode-0.mp4

如果将训练完成的判断标准改成最后num_p_av个回报的最小值都要满足要求。也就是在main.py168行后新增一行代码计算最后num_p_av个回报的最小值,然后将169行的判断标准变成该最小值,那么结果如下:
- 上述训练结果的神经网络参数为“lunar_lander_model.h5(34KB)”,需要自取。
本节 Quiz:
The Lunar Lander is a continuous state Markov Decision Process (MDP) because:
√ The state contains numbers such as position and velocity that are continuous valued.
× The state has multiple numbers rather than only a single number (such as position in the x x x-direction).
× The reward contains numbers that are continuous valued.
× The state-action value Q ( s , a ) Q(s, a) Q(s,a) function outputs continuous valued numbers.In the learning algorithm described in the videos, we repeatedly create an artificial training set to which we apply supervised learning where the input x = ( s , a ) x=(s, a) x=(s,a) and the target, constructed using Bellman’s equations, is y=__?
× y = max a ′ Q ( s ′ , a ′ ) y= \underset{a'}{\max}Q(s',a') y=a′maxQ(s′,a′) where s ′ s' s′ is the state you get to after taking action a a a in states.
× y = R ( s ) y= R(s) y=R(s)
√ y = R ( s ) + γ max a ′ Q ( s ′ , a ′ ) y= R(s) + \gamma\;\underset{a'}{\max}Q(s', a') y=R(s)+γa′maxQ(s′,a′) where s ′ s' s′ is the state you get to after taking action a a a in state s s s.
× y = R ( s ) y= R(s) y=R(s) where s ′ s' s′ is the state you get to after taking action a a a in state s s s.You have reached the final practice quiz of this class! What does that mean? (Please check all the answers, because all of them are correct!)
√ The DeepLearning.Al and Stanford Online teams would like to give you a round of applause!
√ You deserve to celebrate!
√ What an accomplishment - you made it!
√ Andrew sends his heartfelt congratulations to you!
4. 课程总结和致谢