摇杆开关的简单应用
文章目录
- 一、应用场景?
- 二、摇杆开关是什么?
- 三、使用步骤
-
- 1.硬件
- 2.软件
-
- 2.1 初始化配置代码如下(示例):
- 2.2 读取ADC的值代码如下(示例):
- 2.3 摇杆开关动作扫描代码如下(示例):
- 2.4 变量定义(示例):
- 3.测试结果
- 四、 总结
一、应用场景?
摇杆开关通常用于需要进行方向控制或位置选择的应用中。以下是一些可能会使用到摇杆开关的情况:
1.游戏控制器:带有摇杆的模拟开关可以作为游戏控制器的一部分,用于控制角色的移动方向或相机的视角。
2.摄像机控制:在摄影和摄像领域中,摇杆可以用来控制摄像机的云台、倾斜和缩放等功能,实现平滑的运动和精确的定位。
3.机器人操作:对于一些机器人应用,带有摇杆的模拟开关可以用来控制机器人的移动方向和速度,同时还可以实现其他功能,如臂部的抬升和旋转等。
4.航空模型控制:在遥控飞机、直升机、无人机等航空模型中,摇杆可以用来控制飞行器的姿态、方向和速度,提供精确的操控能力。
5.工业控制系统:在工业自动化领域中,带有摇杆的模拟开关可以用于控制机器、设备或生产线的运动和位置选择,实现精确的操作和调整。
二、摇杆开关是什么?
微型指拨摇杆开关:THB001P
带有多功能, 高质量的双轴杠杆和集成的中心选择开关 适用于航模玩具遥控器电位器、3D摇杆PS4手柄游戏机、无人机摇杆电位器、工业控制器。
工作原理如下:
1.摇杆位置传感器:THB001P内部集成了一个摇杆位置传感器,通常是一个可变电阻或霍尔效应传感器。
2.模数转换器(ADC):微控制器或其他电子设备上的ADC模块用于将模拟信号转换为数字信号。THB001P的摇杆位置传感器输出的模拟信号会经过ADC转换为数字信号。
3.数字信号处理:转换后的数字信号可以通过软件算法进行处理,以确定摇杆的具体位置和状态。
4.控制反馈:处理后的数字信号可以用于控制相关设备或提供反馈信息,例如调整音量、移动机械部件等。
所以,如果THB001P是一个带有摇杆的模拟开关,它的工作原理涉及到摇杆位置传感器、模数转换器(ADC)和数字信号处理。这种设计能够实现更精确的位置检测和控制。

三、使用步骤
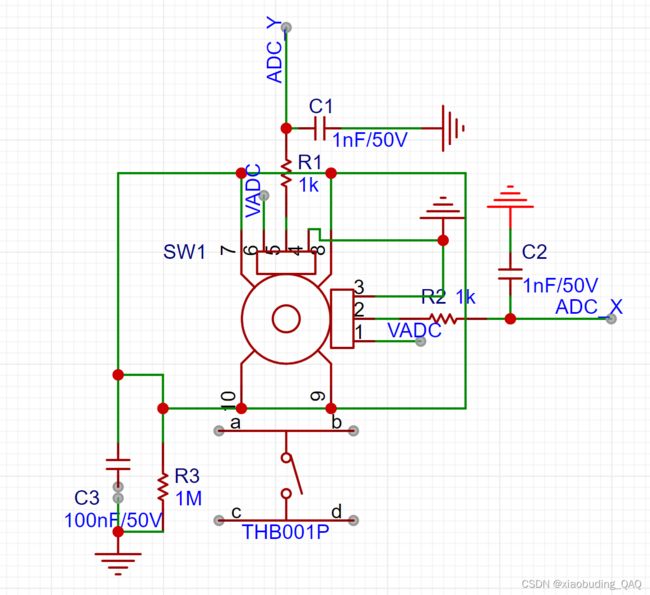
1.硬件
ADC_X和ADC_Y接的是单片机的ADC通道引脚,VADC是ADC的电压,这里没用到那个按键所以不接。
2.软件
2.1 初始化配置代码如下(示例):
/*******************************************************************************
* 函数名:User_Rocker_Init
* 描述 :摇杆开关初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void User_Rocker_Init(void)
{
Rocker_ADC_Init();
Rocker_DATA_Init();
}
/*******************************************************************************
* 函数名:Rocker_ADC_Init
* 描述 :摇杆开关ADC配置初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void Rocker_ADC_Init(void)
{
ADC_InitTypeDef ADC_InitS;
Rocker_GPIO_Init();//ADC引脚配置
RCC_APB2PeriphClockCmd(Rocker_AFIO_RCC | Rocker_ADC_RCC,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
ADC_InitS.ADC_Mode = ADC_Mode_Independent;
ADC_InitS.ADC_ScanConvMode = ENABLE; //多通道(ENABLE)/单通道(DISABLE)
ADC_InitS.ADC_ContinuousConvMode = ENABLE; //连续(ENABLE)/单次(DISABLE)
ADC_InitS.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitS.ADC_DataAlign = ADC_DataAlign_Right; //数据右对齐
ADC_InitS.ADC_NbrOfChannel = 2; //通道数
ADC_Init(ADC_TYPE, &ADC_InitS);
ADC_Cmd(ADC_TYPE,ENABLE);
ADC_ResetCalibration(ADC_TYPE);
while(ADC_GetResetCalibrationStatus(ADC_TYPE));
ADC_StartCalibration(ADC_TYPE);//开始指定ADC的校准状态
while(ADC_GetCalibrationStatus(ADC_TYPE));//获取指定ADC的校准程序
ADC_SoftwareStartConvCmd(ADC_TYPE, ENABLE);//使能或者失能指定的ADC的软件转换启动功能
}
/*******************************************************************************
* 函数名:Rocker_GPIO_Init
* 描述 :摇杆开关引脚初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void Rocker_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(Rocker_GPIO_RCC, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = ADCX_Pin | ADCY_Pin;//PA4,PA5
GPIO_Init(Rocker_GPIO, &GPIO_InitStructure);//GPIOA
}
/*******************************************************************************
* 函数名:Rocker_DATA_Init
* 描述 :摇杆开关数据初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void Rocker_DATA_Init(void)
{
Rocker_State.bits.Up = 0;
Rocker_State.bits.Down = 0;
Rocker_State.bits.Right = 0;
Rocker_State.bits.Left = 0;
Rocker_State.Up_Shift = 0;
Rocker_State.Down_Shift = 0;
Rocker_State.Right_Shift = 0;
Rocker_State.Left_Shift = 0;
Rocker_State.bits.Swing_mark = 0;
}
2.2 读取ADC的值代码如下(示例):
/*******************************************************************************
* 函数名:Read_AdC_Value
* 描述 :读取ADC的值
* 输入 :uint8_t
* 输出 :uint16_t
* 调用 :
* 备注 :ADC采样
*******************************************************************************/
uint16_t Read_AdC_Value(uint8_t cmd)
{
while(!ADC_GetFlagStatus(ADC_TYPE,ADC_FLAG_EOC));//转换结束标志位
ADC_RegularChannelConfig(ADC_TYPE,cmd,1,ADC_SampleTime_28Cycles5);
ADC_SoftwareStartConvCmd(ADC_TYPE, ENABLE);
return ADC_GetConversionValue(ADC_TYPE);//返回最近一次ADCx规则组的转换结果
}
cmd表示ADC的通道。
2.3 摇杆开关动作扫描代码如下(示例):
/*******************************************************************************
* 函数名:Rocker_Scan
* 描述 :摇杆开关动作扫描
* 输入 :void
* 输出 :void
* 调用 :1ms
* 备注 :
*******************************************************************************/
void Rocker_Scan(void)
{
X_Value = Read_AdC_Value(ADC_Channel_4);
delay_syms(10); // 不可注释掉,确保X转换完毕能正常开始Y转换,确保ADC的准确性
// printf("X_Value = %d\r\n",X_Value);
if (X_Value > 1900) // 往下
{
Rocker_State.bits.Swing_mark = 1;
Rocker_State.bits.Up = 0;
Rocker_State.bits.Down = 1;
// printf("Rocker_State.bits.Down = %d\r\n",Rocker_State.bits.Down);
}
else if (X_Value < 1700) // 往上
{
Rocker_State.bits.Swing_mark = 1;
Rocker_State.bits.Up = 1;
Rocker_State.bits.Down = 0;
// printf("Rocker_State.bits.Up = %d\r\n",Rocker_State.bits.Up);
}
else if ((X_Value > 1750) && (X_Value < 1850))
{
Rocker_State.Up_Shift = 0;
Rocker_State.Down_Shift = 0;
Rocker_State.bits.Up = 0;
Rocker_State.bits.Down = 0;
}
Y_Value = Read_AdC_Value(ADC_Channel_5);
// printf("Y_Value = %d\r\n",Y_Value);
if (Y_Value > 1750) // 往右
{
Rocker_State.bits.Swing_mark = 1;
Rocker_State.bits.Right = 1;
Rocker_State.bits.Left = 0;
// printf("Rocker_State.bits.Right = %d\r\n",Rocker_State.bits.Right);
}
else if (Y_Value < 1550) // 往左
{
Rocker_State.bits.Swing_mark = 1;
Rocker_State.bits.Right = 0;
Rocker_State.bits.Left = 1;
// printf("Rocker_State.bits.Left = %d\r\n",Rocker_State.bits.Left);
}
else if ((Y_Value > 1600) && (Y_Value < 1700))
{
Rocker_State.Right_Shift = 0;
Rocker_State.Left_Shift = 0;
Rocker_State.bits.Right = 0;
Rocker_State.bits.Left = 0;
}
if ((!Rocker_State.bits.Down) && (!Rocker_State.bits.Up) && (!Rocker_State.bits.Right) && (!Rocker_State.bits.Left))
{
if (Rocker_State.bits.Swing_mark)
{
Rocker_State.bits.Swing_mark = 0;
Uart1Prints("\r\n*STOP$");
}
LED20_Off();
}
else
{
LED20_On();
if ((Rocker_State.bits.Up) && (!Rocker_State.bits.Down)) // 上
{
if (Rocker_State.bits.Right) // 右
{
Uart1Prints("\r\n*UP Right");
}
else if (Rocker_State.bits.Left) // 左
{
Uart1Prints("\r\n*UP Left");
}
else // X轴不动
{
Uart1Prints("\r\n*[UP XXXX");
}
}
else if ((!Rocker_State.bits.Up) && (Rocker_State.bits.Down)) // 下
{
if (Rocker_State.bits.Right) // 右
{
Uart1Prints("\r\n*DOWN Right");
}
else if (Rocker_State.bits.Left) // 左
{
Uart1Prints("\r\n*DOWN Left");
}
else // X轴不动
{
Uart1Prints("\r\n*DOWN XXXX");
}
}
}
}
通过对X,Y两个轴的AD采集数据,然后对两个数据进行判断来区别上下左右甚至360°方向识别。
2.4 变量定义(示例):
/* Defines ------------------------------------------------------------------*/
#define Rocker_GPIO_RCC RCC_APB2Periph_GPIOA
#define Rocker_AFIO_RCC RCC_APB2Periph_AFIO
#define Rocker_ADC_RCC RCC_APB2Periph_ADC1
#define Rocker_GPIO GPIOA
#define ADC_TYPE ADC1
#define ADCX_Pin GPIO_Pin_4
#define ADCY_Pin GPIO_Pin_5//根据实际引脚配置
/* Variables Define ---------------------------------------------------------*/
struct ST_ROCKER{
struct
{
uint8_t Up:1;//上
uint8_t Down:1;//下
uint8_t Right:1;//右
uint8_t Left:1;//左
uint8_t Swing_mark:1;//摆动标志
}bits;
uint8_t Up_Shift;//上挡位
uint8_t Down_Shift;//下挡位
uint8_t Right_Shift;//右挡位
uint8_t Left_Shift;//左挡位
};
extern struct ST_ROCKER Rocker_State;
extern uint16_t X_Value;//ADC_X
extern uint16_t Y_Value;//ADC_Y
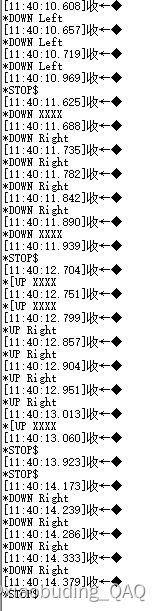
3.测试结果
以下是我用摇杆开关任意方向转动,串口打印的值,可以发现当摇杆回归原点,会打印出*STOP$
四、 总结
以上就是今天要讲的内容,本文仅仅简单介绍了摇杆开关的使用,而摇杆开关的使用还远远不止这一些,有兴趣的可以看看,玩一玩,感谢你的观看,谢谢!
