数据结构之平衡二叉树
平衡二叉树(AVL树)
-
- 一、定义
- 二、平衡二叉树不平衡的情形
- 三、AVL树插入时的失衡与调整
-
- (1)左旋(RR)
- (2)右旋(LL)
- (3)先左旋再右旋(LR)
- (4)先右旋再左旋(RL)
- 四、AVL树的四种删除节点方式
- 五、平衡二叉树的性能分析
一、定义
平衡二叉树也叫自平衡二叉搜索树(Self-Balancing Binary Search Tree),所以其本质也是一颗二叉搜索树,不过为了限制左右子树的高度差,避免出现倾斜树等偏向于线性结构演化的情况,所以对二叉搜索树中每个节点的左右子树作了限制,左右子树的高度差称之为平衡因子,树中每个节点的平衡因子绝对值不大于 1,此时二叉搜索树称之为平衡二叉树。
自平衡是指,在对平衡二叉树执行插入或删除节点操作后,可能会导致树中某个节点的平衡因子绝对值超过 ,即平衡二叉树变得“不平衡”,为了恢复该节点左右子树的平衡,此时需要对节点执行旋转操作。
二、平衡二叉树不平衡的情形
把需要重新平衡的结点叫做α,由于任意两个结点最多只有两个儿子,因此高度不平衡时,α结点的两颗子树的高度相差2.容易看出,这种不平衡可能出现在下面4中情况中:
(1)对α的左儿子的左子树进行一次插入
(2)对α的左儿子的右子树进行一次插入
(3)对α的右儿子的左子树进行一次插入
(4)对α的右儿子的右子树进行一次插入
情形1和情形4是关于α的镜像对称,二情形2和情形3也是关于α的镜像对称,因此理论上看只有两种情况,但编程的角度看还是四种情形。
第一种情况是插入发生在“外边”的情形(左左或右右),该情况可以通过一次单旋转完成调整;第二种情况是插入发生在“内部”的情形(左右或右左),这种情况比较复杂,需要通过双旋转来调整。
三、AVL树插入时的失衡与调整
AVL树的四种插入节点方式:
假设一颗 AVL 树的某个节点为 A,有四种操作会使 A 的左右子树高度差大于 1,从而破坏了原有 AVL 树的平衡性。平衡二叉树插入节点的情况分为以下四种:

(1)左旋(RR)
所谓LL(左旋)就是向左旋转一次,下图所示为最简洁的左旋(插入3导致值为1的节点不平衡):

然而更多时候根节点并不是只有一个子树,下图为复杂的LL(左旋,插入13导致值为4的节点不平衡):

红色节点为插入后不平衡的节点,黄色部分为需要改变父节点的分支,左旋后,原红色节点的右孩子节点变成了根节点,红色节点变成了它的左孩子,而它原本的左孩子(黄色部分)不能丢,而此时红色节点的右孩子是空的,于是就把黄色部分放到了红色节点的右孩子的位置上。调整后该二叉树还是一棵二叉排序(搜索)树,因为黄色部分的值大于原来的根节点的值,而小于后来的根节点的值,调整后,黄色部分还是位于原来的根节点(红色节点)和后来的根节点之间。
LL(左旋)代码如下:
node *LeftRotate(node *root) {
//左旋
node *temp=root->right;
root->right=temp->left;
temp->left=root;
return temp;
}代码解析:返回的是左旋后的根节点,左旋后的根节点是原来根节点的右孩子,左旋后的根节点的左孩子需要嫁接到原来根节点的右孩子上,原来的根节点嫁接到左旋后根节点的左孩子上。temp对应上图中值为8的节点,root对应上图中值为4的节点。
(2)右旋(LL)
所谓RR(右旋)就是向右旋转一次,下图所示为最简洁的右旋(插入1导致值为3的节点不平衡):

然而更多时候根节点并不是只有一个子树,下图为复杂的RR(右旋,插入1导致值为9的节点不平衡):

红色节点为插入后不平衡的节点,黄色部分为需要改变父节点的分支,右旋后,原红色节点的左孩子节点变成了根节点,红色节点变成了它的右孩子,而它原本的右孩子(黄色部分)不能丢,而此时红色节点的左孩子是空的,于是就把黄色部分放到了红色节点的左孩子的位置上。调整后该二叉树还是一棵二叉排序(搜索)树,因为黄色部分的值小于原来的根节点的值,而大于后来的根节点的值,调整后,黄色部分还是位于后来的根节点和原来的根节点(红色节点)之间。
RR(右旋)代码如下:
node *RightRotate(node *root) {
//右旋
node *temp=root->left;
root->left=temp->right;
temp->right=root;
return temp;
}代码解析:返回的是右旋后的根节点,右旋后的根节点是原来根节点的左孩子,右旋后的根节点的右孩子需要嫁接到原来根节点的左孩子上,原来的根节点嫁接到右旋后根节点的右孩子上。temp对应上图中值为5的节点,root对应上图中值为9的节点。
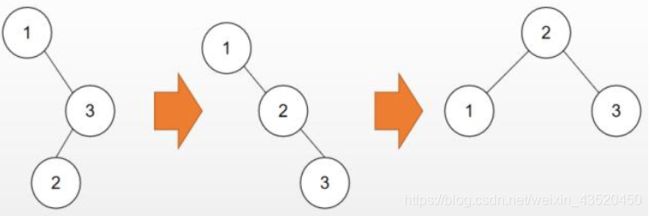
(3)先左旋再右旋(LR)
所谓LR(先左旋再右旋)就是先将左子树左旋,再整体右旋,下图为最简洁的LR旋转(插入2导致值为3的节点不平衡):

然而更多时候根节点并不是只有一个子树,下图为复杂的LR旋转(插入8导致值为9的节点不平衡):

先将红色节点的左子树左旋,红色节点的左子树的根原本是值为4的节点,左旋后变为值为6的节点,原来的根节点变成了左旋后根节点的左孩子,左旋后根节点原本的左孩子(蓝色节点)变成了原来的根节点的右孩子;再整体右旋,原来的根节点(红色节点)变成了右旋后的根节点的右孩子,右旋后的根节点原本的右孩子(黄色节点)变成了原来的根节点(红色节点)的左孩子。旋转完成后,仍然是一棵二叉排序(搜索)树。
LR旋转代码如下:
node *LeftRightRotate(node *root) {
//先对root的左子树左旋再对root右旋
root->left=LeftRotate(root->left);
return RightRotate(root);
}代码解析:返回的是LR旋转后的根节点,先对根节点的左子树左旋,再整体右旋。root对应上图中值为9的节点。
(4)先右旋再左旋(RL)
所谓RL(先右旋再左旋)就是先将右子树右旋,再整体左旋,下图为最简洁的RL旋转(插入2导致值为1的节点不平衡):
然而更多时候根节点并不是只有一个子树,下图为复杂的RL旋转(插入8导致值为4的节点不平衡):

先将红色节点的右子树右旋,红色节点的右子树的根原本是值为9的节点,右旋后变为值为6的节点,原来的根节点变成了右旋后根节点的右孩子,右旋后根节点原本的右孩子(蓝色节点)变成了原来的根节点的左孩子;再整体左旋,原来的根节点(红色节点)变成了左旋后的根节点的左孩子,左旋后的根节点原本的左孩子(黄色节点)变成了原来的根节点(红色节点)的右孩子。旋转完成后,仍然是一棵二叉排序(搜索)树。
RL旋转代码如下:
node *RightLeftRotate(node *root) {
//先对root的右子树右旋再对root左旋
root->right=RightRotate(root->right);
return LeftRotate(root);
}代码解析:返回的是RL旋转后的根节点,先对根节点的右子树右旋,再整体左旋。root对应上图中值为4的节点。
构造平衡二叉树是一个边插入边调整的过程,插入一个看看是否造成了不平衡,造成了不平衡就立即调整。
代码如下:
node *Insert(node *root,int v) {
if(root==NULL) {
root=new node;
root->val=v;
root->left=NULL;
root->right=NULL;
}else {
if(v<root->val) {
//插到左子树上
root->left=Insert(root->left,v);
if(depth(root->left)-depth(root->right)>=2) {
//左边高右边低
if(v<root->left->val) {
//右旋 root=RightRotate(root);
}else {
//先对其左子树左旋再右旋root=LeftRightRotate(root);
}
}
}else {
//插到右子树上
root->right=Insert(root->right,v);
if(depth(root->right)-depth(root->left)>=2) {
if(v>root->right->val) {
//左旋root=LeftRotate(root);
}else {
//先对其右子树右旋再左旋 root=RightLeftRotate(root);
}
}
}
}
return root;
}代码解析:出现不平衡时到底是执行LL、RR、LR、RL中的哪一种旋转,取决于插入的位置。可以根据值的大小关系来判断插入的位置。插入到不平衡节点的右子树的右子树上,自然是要执行LL旋转;插入到不平衡节点的左子树的左子树上,自然是要执行RR旋转;插入到不平衡节点的左子树的右子树上,自然是要执行LR旋转;插入到不平衡节点的右子树的左子树上,自然是要执行RL旋转。
四、AVL树的四种删除节点方式
AVL 树和二叉查找树的删除操作情况一致,都分为四种情况:
(1)删除叶子节点
(2)删除的节点只有左子树
(3)删除的节点只有右子树
(4)删除的节点既有左子树又有右子树
只不过 AVL 树在删除节点后需要重新检查平衡性并修正,同时,删除操作与插入操作后的平衡修正区别在于,插入操作后只需要对插入栈中的弹出的第一个非平衡节点进行修正,而删除操作需要修正栈中的所有非平衡节点。
删除操作的大致步骤如下:
(1)以前三种情况为基础尝试删除节点,并将访问节点入栈。
(2)如果尝试删除成功,则依次检查栈顶节点的平衡状态,遇到非平衡节点,即进行旋转平衡,直到栈空。
(3)如果尝试删除失败,证明是第四种情况。这时先找到被删除节点的右子树最小节点并删除它,将访问节点继续入栈。
(4)再依次检查栈顶节点的平衡状态和修正直到栈空。
对于删除操作造成的非平衡状态的修正,可以这样理解:对左或者右子树的删除操作相当于对右或者左子树的插入操作,然后再对应上插入的四种情况选择相应的旋转就好了。
五、平衡二叉树的性能分析
因为平衡二叉树也是二叉搜索树,回顾二叉搜索树中的操作复杂度,查询、插入和删除复杂度均为Log2N~N。平衡二叉树中查询复杂度影响因素自然为树的高度;插入节点操作可以拆分为两个步骤:查询节点位置,插入节点后平衡操作;删除节点操作同理可以拆分为两个步骤:查询节点位置,删除节点后平衡操作。
平衡调节过程中可能存在旋转操作,递归执行的次数则依赖于树的高度(可以优化为当前节点平衡因子不发生变化,则取消向上递归)。所以平衡二叉树中查询、插入和删除节点操作的复杂度依赖于树高。
平衡二叉树因为左右子树的平衡因子限制,所以不可能存在类似于斜树的情况,因为任一节点的左右子树高度差最大为一,且二叉树具有对称性,所以不妨设每个子树的左子树高度大于右子树高度。