梯度爆炸实验
造成简单循环网络较难建模长程依赖问题的原因有两个:梯度爆炸和梯度消失。一般来讲,循环网络的梯度爆炸问题比较容易解决,一般通过权重衰减或梯度截断可以较好地来避免;对于梯度消失问题,更加有效的方式是改变模型,比如通过长短期记忆网络LSTM来进行缓解。
本节将首先进行复现简单循环网络中的梯度爆炸问题,然后尝试使用梯度截断的方式进行解决。这里采用长度为20的数据集进行实验,训练过程中将进行输出W,U,b的梯度向量的范数,以此来衡量梯度的变化情况。
6.2.1 梯度打印函数
使用custom_print_log实现了在训练过程中打印梯度的功能,custom_print_log需要接收runner的实例,并通过model.named_parameters()获取该模型中的参数名和参数值. 这里我们分别定义W_list, U_list和b_list,用于分别存储训练过程中参数W,U和bW,U和b的梯度范数。
import torch W_list = [] U_list = [] b_list = [] # 计算梯度范数 def custom_print_log(runner): model = runner.model W_grad_l2, U_grad_l2, b_grad_l2 = 0, 0, 0 for name, param in model.named_parameters(): if name == "rnn_model.W": W_grad_l2 = torch.norm(param.grad, p=2).numpy()[0] if name == "rnn_model.U": U_grad_l2 = torch.norm(param.grad, p=2).numpy()[0] if name == "rnn_model.b": b_grad_l2 = torch.norm(param.grad, p=2).numpy()[0] print(f"[Training] W_grad_l2: {W_grad_l2:.5f}, U_grad_l2: {U_grad_l2:.5f}, b_grad_l2: {b_grad_l2:.5f} ") W_list.append(W_grad_l2) U_list.append(U_grad_l2) b_list.append(b_grad_l2)
【思考】什么是范数,什么是L2范数,这里为什么要打印梯度范数?
什么是范数?
我们知道距离的定义是一个宽泛的概念,只要满足非负、自反、三角不等式就可以称之为距离。范数是一种强化了的距离概念,它在定义上比距离多了一条数乘的运算法则。有时候为了便于理解,我们可以把范数当作距离来理解。
在数学上,范数包括向量范数和矩阵范数,向量范数表征向量空间中向量的大小,矩阵范数表征矩阵引起变化的大小。一种非严密的解释就是,对应向量范数,向量空间中的向量都是有大小的,这个大小如何度量,就是用范数来度量的,不同的范数都可以来度量这个大小,就好比米和尺都可以来度量远近一样;对于矩阵范数,学过线性代数,我们知道,通过运算AX=B,可以将向量X变化为B,矩阵范数就是来度量这个变化大小的。
例如:1比2小我们一目了然,可是(3,5,3)和(6,1,2)哪个大?不太好比吧
2范数比:根号(43)比根号(41)大,因此2范数对比中(3,5,3)大
无穷范数比:5比6小,因此无穷范数对比中(6,1,2)大矩阵范数:描述矩阵引起变化的大小,AX=B,矩阵X变化了A个量级,然后成为了B。
向量范数:描述向量在空间中的大小。
更一般地可以认为范数可以描述两个量之间的距离关系。向量范数的通用公式为L-P范数
记住该公式其他公式都是该公式的引申。
L-0范数:用来统计向量中非零元素的个数。
L-1范数:向量中所有元素的绝对值之和。可用于优化中去除没有取值的信息,又称稀疏规则算子。
L-2范数:典型应用——欧式距离。可用于优化正则化项,避免过拟合。
L-∞范数:计算向量中的最大值。
这里为什么要打印梯度范数?
当梯度过大时,它可能导致模型训练过程中的数值不稳定,进而影响模型的性能。
在梯度爆炸实验中,打印范数可以帮助我们了解梯度的幅度大小。范数可以衡量向量的大小,因此通过打印梯度的范数,我们可以直观地看到梯度的幅度是否过大或过小。
如果梯度的范数过大,这可能意味着模型在训练过程中出现了问题,例如梯度爆炸。在这种情况下,我们可以采取一些措施来解决问题,例如调整学习率、使用梯度裁剪等。
简单说,就是范数可以反应梯度的大小,打印范数我们可以及时知道梯度的情况。
6.2.2 复现梯度爆炸现象
为了更好地复现梯度爆炸问题,使用SGD优化器将批大小和学习率调大,学习率为0.2,同时在计算交叉熵损失时,将reduction设置为sum,表示将损失进行累加。 代码实现如下:
from torch.utils.data import Dataset from torch.nn.init import xavier_uniform import torch.nn as nn import torch.nn.functional as F import os import random import torch import numpy as np from nndl4.metric import Accuracy from nndl4.runner import RunnerV3 W_list = [] U_list = [] b_list = [] # 计算梯度范数 def custom_print_log(runner): model = runner.model W_grad_l2, U_grad_l2, b_grad_l2 = 0, 0, 0 for name, param in model.named_parameters(): if name == "rnn_model.W": W_grad_l2 = torch.norm(param.grad, p=2).numpy() if name == "rnn_model.U": U_grad_l2 = torch.norm(param.grad, p=2).numpy() if name == "rnn_model.b": b_grad_l2 = torch.norm(param.grad, p=2).numpy() print(f"[Training] W_grad_l2: {W_grad_l2:.5f}, U_grad_l2: {U_grad_l2:.5f}, b_grad_l2: {b_grad_l2:.5f} ") W_list.append(W_grad_l2) U_list.append(U_grad_l2) b_list.append(b_grad_l2) class DigitSumDataset(Dataset): def __init__(self, data): self.data = data def __getitem__(self, idx): example = self.data[idx] seq = torch.tensor(example[0], dtype=torch.int64) label = torch.tensor(example[1], dtype=torch.int64) return seq, label def __len__(self): return len(self.data) class Embedding(nn.Module): def __init__(self, num_embeddings, embedding_dim, para_attr=xavier_uniform): super(Embedding, self).__init__() # 定义嵌入矩阵 W=torch.zeros(size=[num_embeddings, embedding_dim], dtype=torch.float32) self.W = torch.nn.Parameter(W) xavier_uniform(W) def forward(self, inputs): # 根据索引获取对应词向量 embs = self.W[inputs] return embs # 加载数据 def load_data(data_path): # 加载训练集 train_examples = [] train_path = os.path.join(data_path, "train.txt") with open(train_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) train_examples.append((seq, label)) # 加载验证集 dev_examples = [] dev_path = os.path.join(data_path, "dev.txt") with open(dev_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) dev_examples.append((seq, label)) # 加载测试集 test_examples = [] test_path = os.path.join(data_path, "test.txt") with open(test_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) test_examples.append((seq, label)) return train_examples, dev_examples, test_examples # SRN模型 class SRN(nn.Module): def __init__(self, input_size, hidden_size, W_attr=None, U_attr=None, b_attr=None): super(SRN, self).__init__() # 嵌入向量的维度 self.input_size = input_size # 隐状态的维度 self.hidden_size = hidden_size # 定义模型参数W,其shape为 input_size x hidden_size if W_attr == None: W = torch.zeros(size=[input_size, hidden_size], dtype=torch.float32) else: W = torch.tensor(W_attr, dtype=torch.float32) self.W = torch.nn.Parameter(W) # 定义模型参数U,其shape为hidden_size x hidden_size if U_attr == None: U = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32) else: U = torch.tensor(U_attr, dtype=torch.float32) self.U = torch.nn.Parameter(U) # 定义模型参数b,其shape为 1 x hidden_size if b_attr == None: b = torch.zeros(size=[1, hidden_size], dtype=torch.float32) else: b = torch.tensor(b_attr, dtype=torch.float32) self.b = torch.nn.Parameter(b) # 初始化向量 def init_state(self, batch_size): hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) return hidden_state # 定义前向计算 def forward(self, inputs, hidden_state=None): # inputs: 输入数据, 其shape为batch_size x seq_len x input_size batch_size, seq_len, input_size = inputs.shape # 初始化起始状态的隐向量, 其shape为 batch_size x hidden_size if hidden_state is None: hidden_state = self.init_state(batch_size) # 循环执行RNN计算 for step in range(seq_len): # 获取当前时刻的输入数据step_input, 其shape为 batch_size x input_size step_input = inputs[:, step, :] # 获取当前时刻的隐状态向量hidden_state, 其shape为 batch_size x hidden_size hidden_state = hidden_state + F.tanh( torch.matmul(step_input, self.W) + torch.matmul(hidden_state, self.U) + self.b) return hidden_state # 基于RNN实现数字预测的模型 class Model_RNN4SeqClass(nn.Module): def __init__(self, model, num_digits, input_size, hidden_size, num_classes): super(Model_RNN4SeqClass, self).__init__() # 传入实例化的RNN层,例如SRN self.rnn_model = model # 词典大小 self.num_digits = num_digits # 嵌入向量的维度 self.input_size = input_size # 定义Embedding层 self.embedding = Embedding(num_digits, input_size) # 定义线性层 self.linear = nn.Linear(hidden_size, num_classes) def forward(self, inputs): # 将数字序列映射为相应向量 inputs_emb = self.embedding(inputs) # 调用RNN模型 hidden_state = self.rnn_model(inputs_emb) # 使用最后一个时刻的状态进行数字预测 logits = self.linear(hidden_state) return logits np.random.seed(0) random.seed(0) torch.manual_seed(0) # 训练轮次 num_epochs = 50 # 学习率 lr = 0.2 # 输入数字的类别数 num_digits = 10 # 将数字映射为向量的维度 input_size = 32 # 隐状态向量的维度 hidden_size = 32 # 预测数字的类别数 num_classes = 19 # 批大小 batch_size = 64 # 模型保存目录 save_dir = "./checkpoints" # 可以设置不同的length进行不同长度数据的预测实验 length = 20 print(f"\n====> Training SRN with data of length {length}.") # 加载长度为length的数据 data_path = f"./datasets/{length}" train_examples, dev_examples, test_examples = load_data(data_path) train_set, dev_set, test_set = DigitSumDataset(train_examples), DigitSumDataset(dev_examples), DigitSumDataset( test_examples) train_loader = torch.utils.data.DataLoader(train_set, batch_size=batch_size) dev_loader = torch.utils.data.DataLoader(dev_set, batch_size=batch_size) test_loader = torch.utils.data.DataLoader(test_set, batch_size=batch_size) # 实例化模型 base_model = SRN(input_size, hidden_size) model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes) # 指定优化器 optimizer = torch.optim.SGD(lr=lr, params=model.parameters()) # 定义评价指标 metric = Accuracy() # 定义损失函数 loss_fn = nn.CrossEntropyLoss(reduction="sum") # 基于以上组件,实例化Runner runner = RunnerV3(model, optimizer, loss_fn, metric) # 进行模型训练 model_save_path = os.path.join(save_dir, f"srn_explosion_model_{length}.pdparams") runner.train(train_loader, dev_loader, num_epochs=num_epochs, eval_steps=100, log_steps=1, save_path=model_save_path, custom_print_log=custom_print_log)

接下来,可以获取训练过程中关于W,U和b参数梯度的L2范数,并将其绘制为图片以便展示,相应代码如下:
def plot_grad(W_list, U_list, b_list, save_path, keep_steps=40): # 开始绘制图片 plt.figure() # 默认保留前40步的结果 steps = list(range(keep_steps)) plt.plot(steps, W_list[:keep_steps], "r-", color="#e4007f", label="W_grad_l2") plt.plot(steps, U_list[:keep_steps], "-.", color="#f19ec2", label="U_grad_l2") plt.plot(steps, b_list[:keep_steps], "--", color="#000000", label="b_grad_l2") plt.xlabel("step") plt.ylabel("L2 Norm") plt.legend(loc="upper right") plt.savefig(save_path) print("image has been saved to: ", save_path) save_path = f"./images/6.8.pdf" plot_grad(W_list, U_list, b_list, save_path)

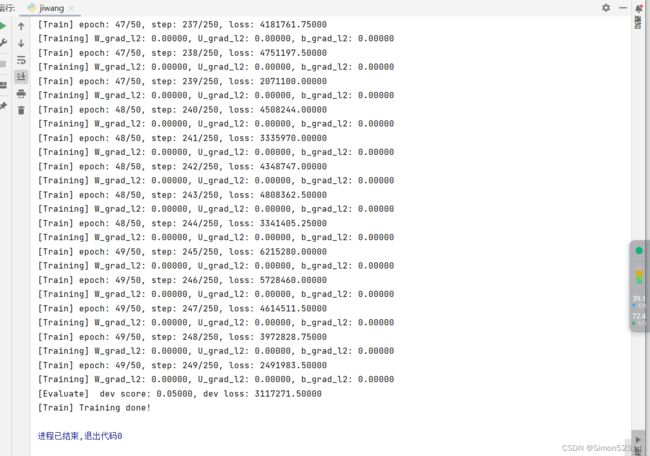
可以看到经过学习率等方式的调整,梯度范数急剧变大,而后梯度范数几乎为0. 这是因为TanhTanh为SigmoidSigmoid型函数,其饱和区的导数接近于0,由于梯度的急剧变化,参数数值变的较大或较小,容易落入梯度饱和区,导致梯度为0,模型很难继续训练.
接下来,使用该模型在测试集上进行测试。
print(f"Evaluate SRN with data length {length}.") # 加载训练过程中效果最好的模型 model_path = os.path.join(save_dir, f"srn_explosion_model_{length}.pdparams") runner.load_model(model_path) # 使用测试集评价模型,获取测试集上的预测准确率 score, _ = runner.evaluate(test_loader) print(f"[SRN] length:{length}, Score: {score: .5f}")

6.2.3 使用梯度截断解决梯度爆炸问题
梯度截断是一种可以有效解决梯度爆炸问题的启发式方法,当梯度的模大于一定阈值时,就将它截断成为一个较小的数。一般有两种截断方式:按值截断和按模截断.本实验使用按模截断的方式解决梯度爆炸问题。
按模截断是按照梯度向量g的模进行截断,保证梯度向量的模值不大于阈值b,裁剪后的梯度为:
当梯度向量g的模不大于阈值b时,g数值不变,否则对g进行数值缩放。
在引入梯度截断之后,将重新观察模型的训练情况。这里我们重新实例化一下:模型和优化器,然后组装runner,进行训练。代码实现如下:
修改一下RunnerV3
class RunnerV3(object): def __init__(self, model, optimizer, loss_fn, metric, **kwargs): self.model = model self.optimizer = optimizer self.loss_fn = loss_fn self.metric = metric # 只用于计算评价指标 # 记录训练过程中的评价指标变化情况 self.dev_scores = [] # 记录训练过程中的损失函数变化情况 self.train_epoch_losses = [] # 一个epoch记录一次loss self.train_step_losses = [] # 一个step记录一次loss self.dev_losses = [] # 记录全局最优指标 self.best_score = 0 def train(self, train_loader, dev_loader=None, **kwargs): # 将模型切换为训练模式 self.model.train() # 传入训练轮数,如果没有传入值则默认为0 num_epochs = kwargs.get("num_epochs", 0) # 传入log打印频率,如果没有传入值则默认为100 log_steps = kwargs.get("log_steps", 100) # 评价频率 eval_steps = kwargs.get("eval_steps", 0) # 传入模型保存路径,如果没有传入值则默认为"best_model.pdparams" save_path = kwargs.get("save_path", "best_model.pdparams") custom_print_log = kwargs.get("custom_print_log", None) # 训练总的步数 num_training_steps = num_epochs * len(train_loader) if eval_steps: if self.metric is None: raise RuntimeError('Error: Metric can not be None!') if dev_loader is None: raise RuntimeError('Error: dev_loader can not be None!') # 运行的step数目 global_step = 0 # 进行num_epochs轮训练 for epoch in range(num_epochs): # 用于统计训练集的损失 total_loss = 0 for step, data in enumerate(train_loader): X, y = data # 获取模型预测 logits = self.model(X) loss = self.loss_fn(logits, y.long()) # 默认求mean total_loss += loss # 训练过程中,每个step的loss进行保存 self.train_step_losses.append((global_step, loss.item())) if log_steps and global_step % log_steps == 0: print( f"[Train] epoch: {epoch}/{num_epochs}, step: {global_step}/{num_training_steps}, loss: {loss.item():.5f}") # 梯度反向传播,计算每个参数的梯度值 loss.backward() if custom_print_log: custom_print_log(self) nn.utils.clip_grad_norm_(parameters=self.model.parameters(), max_norm=20, norm_type=2) # 小批量梯度下降进行参数更新 self.optimizer.step() # 梯度归零 self.optimizer.zero_grad() # 判断是否需要评价 if eval_steps > 0 and global_step > 0 and \ (global_step % eval_steps == 0 or global_step == (num_training_steps - 1)): dev_score, dev_loss = self.evaluate(dev_loader, global_step=global_step) print(f"[Evaluate] dev score: {dev_score:.5f}, dev loss: {dev_loss:.5f}") # 将模型切换为训练模式 self.model.train() # 如果当前指标为最优指标,保存该模型 if dev_score > self.best_score: self.save_model(save_path) print( f"[Evaluate] best accuracy performence has been updated: {self.best_score:.5f} --> {dev_score:.5f}") self.best_score = dev_score global_step += 1 # 当前epoch 训练loss累计值 trn_loss = (total_loss / len(train_loader)).item() # epoch粒度的训练loss保存 self.train_epoch_losses.append(trn_loss) print("[Train] Training done!") # 模型评估阶段,使用'paddle.no_grad()'控制不计算和存储梯度 @torch.no_grad() def evaluate(self, dev_loader, **kwargs): assert self.metric is not None # 将模型设置为评估模式 self.model.eval() global_step = kwargs.get("global_step", -1) # 用于统计训练集的损失 total_loss = 0 # 重置评价 self.metric.reset() # 遍历验证集每个批次 for batch_id, data in enumerate(dev_loader): X, y = data # 计算模型输出 logits = self.model(X) # 计算损失函数 loss = self.loss_fn(logits, y.long()).item() # 累积损失 total_loss += loss # 累积评价 self.metric.update(logits, y) dev_loss = (total_loss / len(dev_loader)) dev_score = self.metric.accumulate() # 记录验证集loss if global_step != -1: self.dev_losses.append((global_step, dev_loss)) self.dev_scores.append(dev_score) return dev_score, dev_loss # 模型评估阶段,使用'paddle.no_grad()'控制不计算和存储梯度 @torch.no_grad() def predict(self, x, **kwargs): # 将模型设置为评估模式 self.model.eval() # 运行模型前向计算,得到预测值 logits = self.model(x) return logits def save_model(self, save_path): torch.save(self.model.state_dict(), save_path) def load_model(self, model_path): state_dict = torch.load(model_path) self.model.load_state_dict(state_dict)实例化模型:
# 清空梯度列表 W_list.clear() U_list.clear() b_list.clear() # 实例化模型 base_model = SRN(input_size, hidden_size) model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes) # 定义clip,并实例化优化器 optimizer = torch.optim.SGD(lr=lr, params=model.parameters()) # 定义评价指标 metric = Accuracy() # 定义损失函数 loss_fn = nn.CrossEntropyLoss(reduction="sum") # 实例化Runner runner = RunnerV3(model, optimizer, loss_fn, metric) # 训练模型 model_save_path = os.path.join(save_dir, f"srn_fix_explosion_model_{length}.pdparams") runner.train(train_loader, dev_loader, num_epochs=num_epochs, eval_steps=100, log_steps=1, save_path=model_save_path, custom_print_log=custom_print_

图像化:
save_path = f"./images/6.9.pdf" plot_grad(W_list, U_list, b_list, save_path, keep_steps=100)

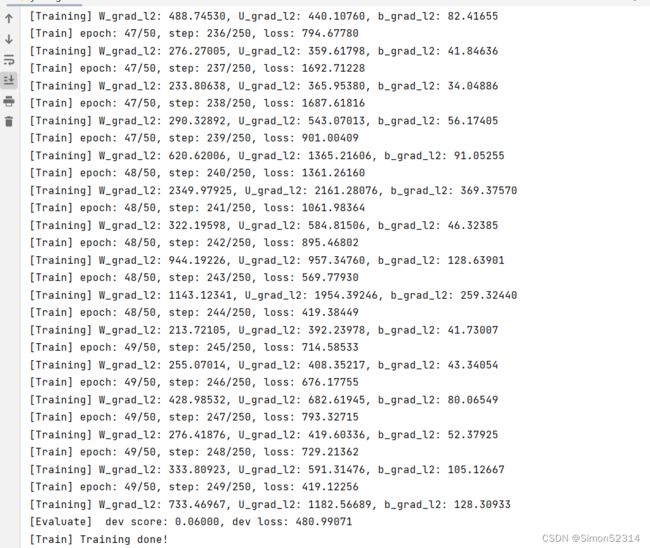
可以看到,随着迭代步骤的进行,梯度始终保持在一个有值的状态,表明按模截断能够很好地解决梯度爆炸的问题.
接下来,使用梯度截断策略的模型在测试集上进行测试。
print(f"Evaluate SRN with data length {length}.") # 加载训练过程中效果最好的模型 model_path = os.path.join(save_dir, f"srn_fix_explosion_model_{length}.pdparams") runner.load_model(model_path) # 使用测试集评价模型,获取测试集上的预测准确率 score, _ = runner.evaluate(test_loader) print(f"[SRN] length:{length}, Score: {score: .5f}")

由于为复现梯度爆炸现象,改变了学习率,优化器等,因此准确率相对比较低。但由于采用梯度截断策略后,在后续训练过程中,模型参数能够被更新优化,因此准确率有一定的提升。
【思考题】梯度截断解决梯度爆炸问题的原理是什么?
梯度截断的主要原理是设置一个梯度剪切阈值。在更新梯度时,如果梯度的大小超过这个预设阈值,那么就会将其强制限制(或缩放)在这个阈值范围之内。这样,梯度就不会过大,从而保证了参数更新的稳定性,有助于模型的稳定训练。
梯度爆炸一般发生在循环神经网络等具有很深层次的模型中,其中梯度可能会在传播过程中指数级地增长。导致梯度爆炸的原因通常是梯度在反向传播时被乘以了很多层的权重,使得梯度值变得非常大。截断是在反向传播过程中,监控梯度的大小,如果梯度超过了事先设定的阈值,就将其截断为该阈值。这样可以保证梯度不会超过一个合理的范围,缓解梯度爆炸问题。还有就是按比例缩小的办法。
总结:
1、

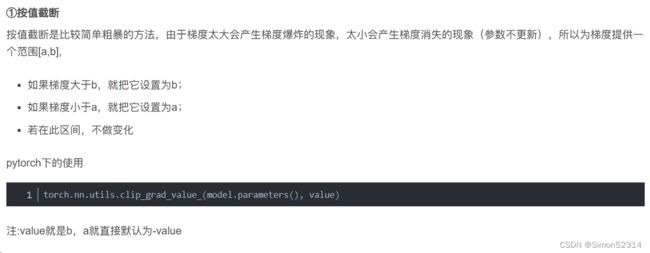
这是在飞浆中用的函数,那么在torch 中可以使用什么呢?
pytorch中应该使用torch.nn.utils.clip_grad_value_(model.parameters(), value)这个函数

2、 了解了范数的概念,以及范数可以反应梯度的大小,打印范数可以及时了解梯度的大小
3、这次了解了梯度截断的两种情况
梯度截断的原因:
由于进行反向传播时,进行每一层的梯度计算,假设梯度都是比较大的值,计算到第一层的梯度时,会呈指数级增长,那么更新完的参数值也会很大,越来越大,就会产生梯度爆炸的现象,找不到最优解。
方法:

参考链接:
神经网络优化(1)之梯度截断-CSDN博客
范数(简单的理解)、范数的用途、什么是范数_矩阵范数的意义-CSDN博客
