CPU/GPU实现向量内积
向量内积(点乘/点积/数量积):两个向量对应元素相乘之后求和:

CPU实现:
//cpu 实现一下向量内积
#include
template
void dot_mul(T *a, T *b, T *c, int n)
{
double tmp = 0;
for(int i = 0; i < n; i++)
{
tmp += a[i] * b[i];
}
*c = tmp;
}
int main()
{
//定义数组以及数组的大小
float a[N], b[N];
float c = 0;
for(int i = 0; i < N; ++i)
{
a[i] = i * 1.0;
b[i] = 1.0
}
dot_cpu(a, b, &c, N);
printf("a dot b output %f\n", c);
printf("Hello World!\n"); 首次接触bank conflict的概念,在这里补充一下。
bank是shared memory中用来存储数据的特殊组织方式。为了高效存取输入shared memory分为32个存储体(bank), 对应32个线程。每个bank有一个固定的带宽,可以同时服务一个线程的访问。当多个线程在一个时钟周期内访问一个bank的不同地址时,会产生bank conflict。因为bank的读取带宽不能高效的同时服务多个线程,因此需要需要解决bank conflict。有个不解的地方,是什么导致所有的thread都去访问同一个bank?
 了解一个bank的属性:bank的宽度是指bank存储器的位宽。位宽是存储器连接的总线一次可以传数的数据量,可以是32bit,也可以是64bit,取决于总线的位数。可以是4字节/8字节。
了解一个bank的属性:bank的宽度是指bank存储器的位宽。位宽是存储器连接的总线一次可以传数的数据量,可以是32bit,也可以是64bit,取决于总线的位数。可以是4字节/8字节。
避免bank conflict的方法有以下几种:
- 使用不同的bank size,可以通过cudaDeviceSetSharedMemConfig函数来设置bank size为4字节或8字节,这样可以改变shared memory到bank的映射方式,减少冲突的可能性。
- 使用memory padding,即在shared memory的数组中增加一些空白的元素,使得不同的线程访问不同的bank,从而避免冲突。

- 使用不同的访问模式,比如使用转置或者重排的方式,使得一个warp中的线程访问不同的bank或者同一个地址,从而避免冲突。
回归正题,用cuda实现向量的内积(点积/点乘/数量积)。
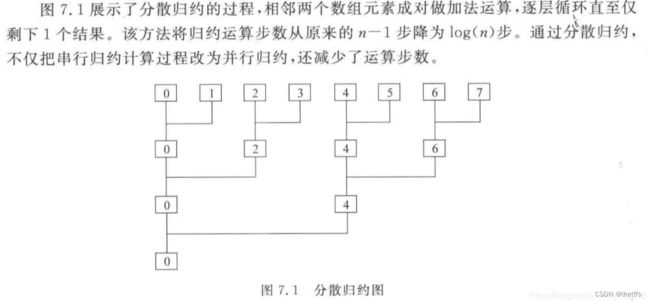
单block分散归约法
第一次理解单block分散归约 takes 3 hours!
第一次手撸整理单block分散归约代码 takes one and a half hours!
main 函数 takes half an hour !
以下是我学习整理后的kernel函数:
#include "cuda_runtime.h"
#include "stdio.h"
#define threadnums 32
#define N 2048
//单block分散归约法
template
__global__ dotmul_gpu_1(T *a, T *b, T *c, int N)
{
const int nThreadIdx = threadIdx.x;//当前线程ID索引
const int nBlockDimX = blockDim.x;//一个block内开启的线程总数
int nTid = nTreadIdx;
dobule dTmp = 0.0;
//开辟shared memory,大小与线程数量一致
__shared__ T tmp[nBlockDimX];
//step 1:
//每个线程负责 N/nBlockDimX 个元素相乘后的累加
while(nTid < N)
{
dTmp += a[nTid] * b[nTid];
nTid += nBlockDimX;
}
//每个线程将以上计算结果放入共享内存中
tmp[nThreadIdx] = dTmp;
//同步线程,等待所有线程完成以上计算
__syncthreads();
//step2:归约reduction
int i = 2;
int j = 1;
while(i <= nBlockDimX)
{
if(nThreadIdx / i == 0)
{
//所有线程完成一次求和归约计算
dTmp = tmp[nThreadIdx] + tmp[nThreadIdx + j];
tmp[nThreadIdx] = dTmp;
}
__syncthreads();
//这个地方利用i和j进行索引比较巧妙
//32个线程进行求和归约,每次归约,线程索引的元素下标如下:
//第一次归约:0+1, 2+3, 4+5, 6+7, 8+9, 10+11, 12+13,14+15, 16+17, 18+19, 20+21, 22+23, 24+25, 26+27, 28+29, 30+31
//第二次归约:0+2, 4+6, 8+10, 12+14, 16+18, 20+22, 24+26, 28+30
//第三次归约:0+4, 8+12, 16+20, 24+28
//第四次归约:0+8, 16+24
//第五次归约:0+16
//求和归约值:0
i *= 2;
j *= 2;
}
//此处只在一个线程中获取向量内积值,因此需要线程ID判断
if(0 == nTreadIdx)
*c = tmp[0];
} 主函数整理如下:
int main()
{
float a[N], b[N];
//对向量a[], b[]初始化值
for(int i = 0; i < N; i++)
{
a[i] = 1.0;
b[i] = i * 1.0;
}
float *d_a=NULL, *d_b=NULL, *d_c=NULL;
//将数组a[]的数据从CPU拷贝到GPU
cudaMalloc(&d_a, N*sizeof(float));
cudaMemcpyAsync(d_a, a, N*sizeof(float), cudaMemcpyHostToDevice);
//将数组b[]的数据从CPU拷贝到GPU
cudaMalloc(&d_b, N*sizeof(float));
cudaMemcpyAsync(d_b, b, N*sizeof(float), cudaMemcpyHostToDevice);
//不要忘记了结果也需要存储在显存上!
cudaMalloc(&d_c, sizeof(float));
//调用kernel函数
dim3 blocks(1,0,0);
dim3 threadPerBlock(threadnums, 0, 0);
dotmul_gpu_1<<>>(d_a, d_b, d_c, N);
//分配的显存需要手动释放
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_c);
return 0;
} 参考链接:
CUDA学习(十):向量内积的多种方法实现_为向量类增加计算内积的功能。-CSDN博客
拯救你的CUDA!什么是bank,为什么会发生bank conflict???_哔哩哔哩_bilibili
该方法存在的问题在参考文章中被指出有违背访问对其原则、容易产生bank conflict。后面再一一学习补充。
此外,解决cuda上向量内积的方法还有,留待后续学习补充: