机器人制作开源方案 | 并联索驱写字机器人
作品简介
作者:张昱鑫 孙卫东 崔紫轩 韩楠 吴荣晴
单位:北京石油化工学院
指导老师:王殿君 陈亚
并联索驱机器人是一种用绳索驱动器代替了一般并联机器人的线性驱动器的机器人。近年来,并联索驱机器人在其理论和技术方面的研究与进展迅速,各种各样的同类型机器人从传统的理论技术慢慢向现代化的实践和应用中转移,已经在摄影相机、飞行模拟器、医用机器人等技术方面的应用中得到了实现。
通过国际人工智能大赛平台,设计一个由绳索驱动的并联索驱机器人实验平台。并对其结构布局、运动学、轨迹规划等一系列问题进行分析。在满足运动需求的前提下对索点的位置及数量进行综合分析,完成整体结构设计方案;进行索驱平面并联机器人实验平台各结构部分设计,基于Solidworks建立并联索驱机器人的模型;通过Matlab完成对索驱平面并联机器人的运动学建模及仿真,并对实验平台的轨迹进行规划和分析;完成索驱平面并联机器人实验平台的搭建;编写了实验程序,完成轨迹规划的实验,数据对比验证并修改优化。
通过对该平台的设计研究,将会对索驱动并联机构的理论研究、实物仿真系统的搭建和产品的研发提供宝贵的经验。
1. 总体概括
1.1 选题背景及研究意义
1.1.1 选题背景
机器人发展水平作为衡量国家的科学技术革新及其中高层次制造工艺水平的一个重要指标,机器人行业的进步与发展是引人注目的。主要经济体均在提升国家战略层次上,加强了对于机器人行业的关注与发展,并将其建设作为保证制造业市场竞争最佳化的重要措施。
按照构造形式的不同来划分,工业机器人可以划分为并联机器人、串联机器人。串联式机器人(又被称之为机械臂)它是由多个驱动控制单元(如安装在一个平台或者机构的末端的动平台)中的多个驱动开关组合而成。并联机器人主要指的是由一个固定的末端机构或可以移动的执行机构上使用两个以上的运动链进行连锁驱动。并联机器人在设计时具有高刚性、强承载能力、小累计误差、高运转精度、良好的动态控制性能等特点。它可以广泛的使用在摄影摄像、工业机构加工、航空、医疗器械等领域。
随着负荷、空间、重量等方面的要求的不断提高,并联式机构在工业应用中的范围也大大拓展。由于并联机器人的工作空间受限较大,并且在工作空间中存在奇异性区域,严重阻碍了并联机器人需要在较大工作空间的场合中的应用和发展[1],并联索驱机器人适合该工作要求。其使用绳索驱动器代替了一般的刚性驱动器来驱动并联机器人,因此使得并联机构获得了更大的工作空间。
虽然绳索驱动的机器人具有独特的性能,对于大量潜在的应用具有吸引力,但在实际应用中,该机器人的设计和开发仍要面对许多挑战性问题。绳索驱动的机器人与常规并联机器人最重要的区别在于绳索作为驱动元件时的性能特点。绳索只能在有张力的情况下工作,并且只能对物体施加拉力而不能施加推力。所以,在绳索驱动机器人的结构中,针对整个工作空间的所有运动任务,必须特别注意确保缆线是在存在张力的情况下工作。所以在索驱动机器人中,冗余驱动是必需的,即机构至少需要n+1根柔索驱动来保证其自由度为n,以确保在工作空间内的所有绳索具有适当的张力[2]。最近几年以来,绳索驱动并联机器人在理论知识层面得研究取得了较快进展,许多的此类机器人由理论技术转移到了实际生活中,像在飞行模拟器、医学、电影拍摄等许多领域中得到运用。
1.1.2 研究意义
基于以上问题,通过本次大赛,旨在研究设计一个并联索驱机器人实验平台。通过对该并联机器人实验平台的的绳索布局方案进行研究,可以为类似使用绳索驱动的机构的设计提供理论知识的示例,对其结构设计有较大帮助,方便更为有效的掌握索驱动结构。另外对系统的运动学以及考虑驱动系统影响的电机驱动的运动控制进行研究,有助于更好的了解索驱动并联机器人的运动姿态和控制方式,为索驱动并联机器人的运动学理论研究提供参考。
1.2 并联索驱机器人研究现状
1.2.1 并联索驱机器人的国外发展状况
近几年来,索驱动并联机构引起了众多专家的广泛关注,并且在不同的领域都已经取得了一些有建设性的的研究成果,使的并联索取机构得到了发展。
1980年代中期,来自美国麻省理工学院的研究人员Landsberger研究了缆线驱动并行机器人的设计,根据海洋环境下操作的要求设计了3种自由度的缆线驱动并行机器人[3]。1989年,Dagalakis等开发了绳驱动并行机器人ROBOCRANE [4]。目前,第一代的ROBOTCRANE驱动机器人正在造船、建设和其他产业中使用。加利福尼亚大学开发的无线驱动并联机器人被应用于环境监测[5]。
1990年代后期以后,德国杜斯堡精华大学机械电气综合研究所就对有线电缆并联驱动器和并联电机运动控制装置的实验项目研究开展了深入研究,开发设计出了一台实验用的原型机SEGESTA[6]。1999年9月神户大学与东京海洋技术大学的一个学术联合研究小组正式提出冗余绳索牵引机器人WARP的提案[7]。为了更好地完成宇宙实验土壤采样工作,女王皇后大学机器人研究所的科学家们和团队在加拿大航空宇宙设备开发公司的大力支持下,开发了新的4-DOF电缆驱动并行机器人CAT4 [8]。2013年,来自德国Frunhofer研究所的IPanema柔性电缆机器人在德国斯图加特召开的并行电缆机器人研究会议上首次展出,随后它在业界被广泛应用于检查和组装[9]。意大利物理学者Bergamasco特别分析了6个自由度缆线驱动的并联机构的工作空间和冗余度,并设计了一个有力反馈功能的控制器[10]。加拿大学者Gosselin 开发了一种超大型空间平移运动并联运动机构的原型,并解出了电缆驱动并联机器人的边界解析式。
Williams研究了电缆驱动并联机构如何应用到装备和制造的新技术中,建立了一个由十二根绳索驱动的并联机构C4 [11]。如下图所示,上部有4根绳子,下方运行8根绳子。它增加了驱动器的数量,克服了传统制造技术的小工作空间的缺陷。主要用于需求大工作
空间的工作和其他领域。
 3D打印机构
3D打印机构
 平面触觉机构
平面触觉机构
McDonnell Douglas Aerospace研发出一种索驱动并联机构Charlotte,该机构是一种特别适合用于国际通用太空站检测系统的并联检测机构[12]。如下图所示,该机构的驱动由八根绳索来驱动,为了方便在太空中的环境下能够进行针对散热器机构和托架的安装和检查,驱动其移动部件完成目标动作。
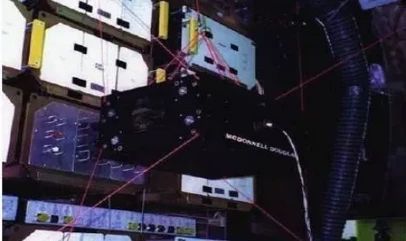 太空站检测机构
太空站检测机构
Sunil K.Agrawal等人研究了电缆悬架机构的动力学和运动控制,并设计开发了一系列欠约束定位电缆驱动并联机构[13]。如下图所示,该机构可以用于装载直升机货物中。
 绳索悬吊机构
绳索悬吊机构
Randall提出了一种治疗器械MACARM,它可以适用在肢体康复的手术中[14]。如下图所示,该康复治疗系统的结构为八根绳索驱动的并联机构,因此其具有相对较高的安全性,并且可以根据患者的不同的身体情况来选择训练的强度。
 康复手术治疗系统
康复手术治疗系统
Clement研制并发明了一个由两个完全独立的索驱动并联机构共同组成的,可以模拟人体行走动作的系统CDLI [15]。如下图所示,该机构可以模拟出当一个人在虚拟的地形上行走时的动作。
 模拟行走系统CDLI
模拟行走系统CDLI
电缆驱动并联机构的典型应用是电缆驱动型相机机器人,在欧洲建立的Spidercam摄像机器人和美国建立的SkyCam机器人已经非常成功了[16]。如下图所示,可以在工作空间中随意的飞行,不需要占用地上的空间,所以在大规模场摄像机系统中得以广泛使用。
 Skycam 摄像机器人
Skycam 摄像机器人
 Spidercam 摄像机器人
Spidercam 摄像机器人
很多外国学者在分析构造的基础上,还完成了很多关于运动学的研究结果。
Yang在平面完全约束下分析了一种CDPM并行机器人的前向运动学位置解,并使用Ferraresi分析方法获得了末端执行器位置的四次多项式方程[17]。Morizono分析并探索了Falcon的结构刚度,工作空间和控制系统[18]。考虑到柔性电缆的单向力特性,即n自由度并联机构,日本学者Ming和Higuchi提出了使用冗余驱动的方案,需要n+1柔性电缆驱动[19]。Ferraresi获得了六自由导线驱动机器人Wiro-6.3的正向运动学求解方法[20]。学者Maier和Woernle共同设立了罗斯大学的研究中心,主要是为了研究不完全受限定位机构IRPM(Incompletely Restrained Positioning Mechanisms)的逆运动学,得出结论,末端执行器的运动路径可以用逆运动学来控制[21]。Robert L、Williams II.通过牛顿迭代方法解决了平面内4条绳索驱动的3个自由度并行机器人的前向运动学解,指出了该方法的扩展应用[22]。Kozak研究了3自由度和6自由度电缆驱动并行机器人的正向和逆向运动学,并提出了计算位置的表示公式[23]。加拿大学者Gosselin开发了一种并联运动机构模型,它能在超大型空间中进行平移操作,并导出了柔性电缆驱动并行机器人的边界解析式。Barrette提出了动态工作空间的定义,并且通过二次规划法求解了机构的动态工作空间[24]。考虑到柔性电缆的变形,Korayem分析了约束柔性电缆驱动机构的工作空间,GoutteFarde使用了区间法研究由8个电缆驱动的6个自由度机器人的工作空间。
Cong Bang Pham分析了完全受限的柔性电缆并联机构的可执行力工作空间,并通过模拟验证了算法的可行性[25]。
1.2.2 并联索驱机器人的国内发展状况
近些年,我国的研究人员经过大量的研究和试验,应用了大量的索驱动并联机构在不同领域。其中以段宝岩和李铁民教授为代表的许多专家学者研究了如何将缆线驱动并联机构应用在大型的射电望远镜上 [26]。如下图所示,控制供电柜的移动以调整柔性电缆的长度并更准确地跟踪射电源。在运动学,静力学,动力学和工作空间方面,他们也进行了深入的研究,主要关于如何解决干扰引起的系统稳定性问题。
 FAST馈源舱模型
FAST馈源舱模型
在研究大型射电望远镜和索驱动并联机构的背景下,郑亚青研究并解决了线缆驱动并联机构的许多亟待解决的重要问题,并将电缆驱动并联机构成功的应用于风洞模型的试验中,借此开发了风洞实验的模型。在理论和实验两个方面研究了电缆驱动并联机构的构成、可变刚度、奇异性和轨道设计。其模型如下图所示:
 风洞实验模型
风洞实验模型
王克义等人将线缆驱动并联机构应用于医疗和康复训练系统,提出了一种新型可移动混合式并行机构,该机构是由电缆驱动并联机构和人的腿部支撑联合构成的。同时还研究了其静态刚度、可控性、控制方法等其它方面[27]。如下图所示,机构是由挠性电缆驱动单元、张力传感器、挠性电缆、机械框架及其它部件构成。
 康复训练系统
康复训练系统
唐晓强等人提出了4根支撑杆8电缆驱动并联机构,用于体积较大的储罐的维护工作,并且建立并行线驱动机器人的运动学模型,分析机构参数对工作空间的影响[28]。如下图所示,模块化设计方法被应用于便于组装和分解的机构,能有效地提高了工作效率。
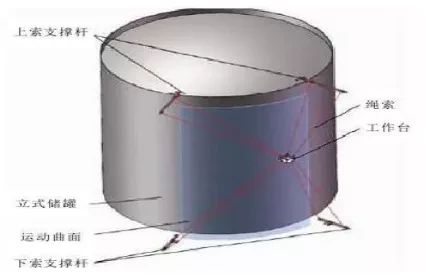 立式储罐检修系统
立式储罐检修系统
许多国内研究人员对电缆驱动并行机器人的运动学分析做出了优异的贡献。杜敬利使用动态缓和法和简单迭代法来静态机制,并获得机构的位置正向运动学的解[29]。学者訾斌利用牛顿欧拉法和拉格朗日法,建立了由柔性电缆驱动的并行机构的正向动态模型和逆向动态模型,并进一步进行了研究[30]。唐奥菲试图用电缆长度迭代方法求解9条绳索驱动的6个自由度机制的正向动力学问题。陈柏研究了电缆驱动型医疗康复机器人,并利用闭合矢量法确立了机械装置的逆运动模型[31]。曹毅等人设计了适用于飞机风洞试验的柔性电缆牵引机构,提出了一种基于三角锥法的方法来解决前面的运动学问题,并对其运动学和动力学进行了详细的研究[32]。以6自由度7电缆并联机器人为目标,张波采用Newton-Euler法导出了机器人的动态方程。段宝岩研究了广泛范围的电缆驱动并行机器人的低频振动,建立了正确的动态模型,并使用了动态缓和数值法来解决该机构的正向运动学[33]。
综上所述,索驱动并联机器人在理论层面已经有了很大进展,解决了一些棘手的科学问题。将索驱动并联机构与不同的技术相结合,可以设计出适用于不同场合和不同要求的新型机构。像在加工制造、医疗器械、航空航天方面已经进行了许多的应用。但是在实际应用中仍然存在很多急需处理的问题。在运动学方面对不同机构进行运动学正解、逆解分析也都有了较为全面的研究。但是研究的这些机构大多为比较精密的造价昂贵的机械装置,不适合作为日常研究索驱动并联机构而使用的器械。为此,本文将研究设计一个机械结构较为简单、造价便宜的、可用于日常实验研究的并联索驱机器人是实验平台。
1.3 本文的主要研究内容
通过大赛提供的探索者平台,结合索驱动并联机构,将索驱动并联机构应用于一种写字机器人中,用以实现人为设计轨迹要求的写字机构。在研究过程中,使用绳索代替刚性部件来驱动平台,对绳索驱动并联机构的结构进行设计,创建运动学模型并进行运动学分析和仿真并进行轨迹规划实验。主要研究内容如下:
(1)索驱动并联机器人的结构设计:该机构主要包括动、静平台的设计,绞盘的设计,电机的选型以及绳索的布局。基于确定的结构方案进行三维模型建造。
(2)运动学建模及分析:明确工作空间,建立合理的坐标系,分析运动学的逆解,主要包括位置情况方面的研究。分析得到移动工作平台的位姿和绳索的长度变化之间的关系。使用Solidworks和MATLAB软件进行仿真分析。
(3)软硬件结合及实验仿真:基于做好的三维模型搭建实验样机,基于运动学分析做轨迹规划,设计硬件控制电路,设计相关程序来完成平台的运动控制。最后进行实验,完善整体设计方案。
2. 总体方案设计
本文旨在设计一个由绳索驱动的并联机器人实验平台,能满足完成轨迹规划的前提下,有进行轨迹的书写的功能。其次,该实验平台不宜过大,尽量满足其动平台工作空间在一张A4内,在满足运动需求的前提下对索点的位置及数量进行综合分析,要求布局合理。同时其动平台的工作状态要求平稳可靠,保证轨迹的清晰美观。
2.1 结构方案设计
2.1.1 自由度分析
Kutabach-Grubler法是传统计算空间自由度的方法,即如果假设一个机构的运动件个数为n,运动副个数为s,而且每个运动副具有fi个自由度,则该机构的空间自由度公式为:D=6×(n-s-1)+∑fi
式中:
D—机构的自由度总数
n—构件总数(包括机架)
s—运动副数目
fi—第i个运动副的自由度数
如果计算由刚性部件驱动的并行机构,Kutabach Gruble法可以用来计算其自由度。但是,由于绳子的柔软性,它仅可以承受轴向的张力,却无法承受压力, 因此,n根柔软的绳子并不能完全限制n个自由度,至少需要n+1根绳索。多余的一根或多根绳索则是用来确保机构的所有驱动绳索都可以处于张力状态。
索驱动并行机器人的末端执行器的位置和姿势由绳索限制控制。但是,绳索相较刚性物体驱动具有特殊性,这使得其在应用中受到很大的限制。完全约束的绳索驱动并联机构大致可分为下列几种类型,如下表所示:
 表1 机构自由度及运动类型
表1 机构自由度及运动类型
2.1.2 方案设计
基于设计要求,该索驱平面并联机器人实验平台设计可有三种方案:
① 由四绳索驱动的只在一个平面内运动的2自由度机器人,如下图所示:
 二自由度平面柔索驱动并联机器人模型
二自由度平面柔索驱动并联机器人模型
② 六绳索驱动的同一坐标系内的沿XYZ轴移动的3自由度并联机器人(末端执行器和6根绳索连接处在同一平面内),如下图所示:
 空间三自由度柔索驱动并联机器人模型简图
空间三自由度柔索驱动并联机器人模型简图
③ 六绳索驱动的空间5自由度并联机器人(末端执行器和6跟绳索连接处在两个不同平面内),如下图所示:
 空间五自由度柔索驱动并联机器人模型简图
空间五自由度柔索驱动并联机器人模型简图
2.1.3 方案确定
综合分析,方案一可实现平面内的点的运动,仅可实现连笔字书写,需依靠人工配合来完成书写任务,操作较为麻烦。方案二和方案三均可实现线的空间运动,相比较而言,方案三在书写过程中动平台更为稳定,因此最终选择方案三。
2.2驱动系统方案设计
2.2.1 驱动器设计
交流电机不能调节速度,主要是不能无级调整速度。直流电机具有良好的启动和速度调整性能,宽速度范围,调速过程较为平滑。伺服电机精度高,能实现位置、速度、扭矩的闭环控制,稳定性强。步进电机的速度和位移可以由控制系统发送的脉冲的数量来控制。由于步进电机的位移严格与脉冲的数量成比例,因此步进电机可以获得高重复定位精度,但是步进电机的速度不高,控制系统复杂。线性电机简单且成本低,速度和行程主要取决于定子和转子的长度。但是其精度在制动时很低。
探索者实验平台体积较小,工作环境温和,工作时速度较小,且要求能进行轨迹规划实验,调速性能要好,定位精度需求较高,综合考虑,选择直流电机为驱动电机。由于卷轴在工作时转速较低,且需要较高的精度,因此在电机和卷轴的传动中不需添加减速器,用联轴器直接连接即可。
2.2.2 绳索驱动方案选择
由于绳索本身只能承受单向拉力,因此在N-DOF的机构中,为了实现运动控制,需要N+1绳来驱动致动器。这就有两种选择:并联绳索驱动和闭环绳驱动。如下图所示,并联绳索驱动的结构为由N+1根绳索驱动。其优点是结构相对简单,控制比较简单,并且不需要有其他的机构来进行辅助。缺点是由于驱动器数量的增加,整体重量增加。
 并联索驱动系统
并联索驱动系统
如下图所示,闭环绳索驱动器是通过使用具有恒定长度的N条绳索来控制机构实现N自由度。即用一个驱动器用于控制一个自由度的双向运动。其优点是机器人的机械系统相对简单,但其缺点是电机两端的绳索变化不相同,因此增加绳索的张力来补偿绳索的长度,并给予绳索所需的紧固力。基于设计要求,本次设计使用了一种更方便的并联绳索驱动方式来简化该结构。
 闭环索驱动系统
闭环索驱动系统
3. 结构设计
由于生活中通用机器人的各种功能,其形状和结构也不同,各种机构的分析和控制方法不同,所以在理论分析之前,必须根据设计要求构建绳驱动并行机器人的基本结构。电缆驱动并行机器人与以往的工业机器人不同,特别是在工作空间和结构的灵活性方面具有固有的优点。它可以根据其应用环境和目的来设计其基本的机械结构。本次设计用的是SolidWorks软件,因为它是当下最好用的三维机械设计软件。
3.1 零部件设计
3.1.1 静平台设计
静平台是保证实验平台的安全性和正常操作的主要部件。首先,其基本要求,必须不能有摇晃,连接必须紧密,不能因为工作中产生的外力而变形其次,根据设计方案要求,该实验平台由六根绳索驱动,需要六个电机分别带动卷轴转动。因此该静平台结构由六部分组成。再考虑到该平台的工作空间大小以及工作环境,该静平台整体尺寸为600mm×600mm。其中又包含两个大基座和六个小基座,大基座尺寸为110mm×250mm,小基座尺寸为70mm×110mm。整体结构如下图所示:
 静平台结构模型
静平台结构模型
3.1.2 动平台设计
因为该动平台需要完成书写轨迹的任务,所以其需要满足握笔的功能,同时,该动平台为六根绳索驱动且需满足空间五自由度运动,所以其连接部分在两个不同平面内。尺寸大小应适宜,与静平台比例尺寸合适,能适应不同尺寸的笔,因此将其设计为三部分灵活可调。其外部圆环需根据笔的大小而调节完成紧固的作用,所以不能采用刚性部件,因此选用弹性较小的胶带,通过缠绕的方式来紧固动平台。结构如下图所示:
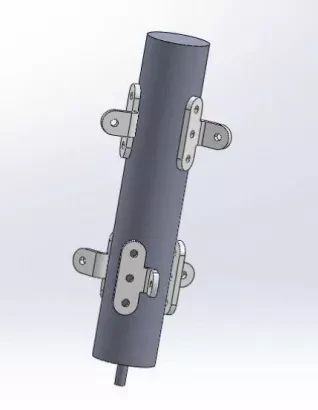 动平台三维模型
动平台三维模型
3.1.3 绳索设计选型
绳索的选材有很多,例如剑麻、尼龙、钢丝绳等等。剑麻绳拉力强、耐酸碱、耐摩擦、耐严寒,但其表面粗糙,摩擦力大。尼龙绳的强度和密度高、防腐蚀和抗疲劳特点良好、经久耐用。钢丝绳可以实现将负载力传递到很远的地方、安全系数高、并且耐磨、防震。
根据设计要求,绳索所受拉力较小,一般绳索均可满足强度要求。考虑到在绳索驱动过程中,为保证动平台运动的精确性和平稳性,绳索应选择没有弹性且柔顺较性好的,因此综合分析,选择尼龙绳符合设计要求。其拉力参数如下表所示:
 表2 尼龙绳尺寸参数
表2 尼龙绳尺寸参数
因为其极限拉力远超实际工作拉力,考虑到该实验平台整体尺寸,选择4mm尼龙绳。
3.2电机选型
该实验平台中的运动速度较慢,因此该实验平台所需电机的速度和扭矩为主要参考因素。查阅资料得一般情况下人写字时的速度大概为0.05m/s。电机转速n和绳索速度v之间关系为
![]()
已知r=25mm,则可得n=19.1r/min。故电机所需转速应大于19.1r/min。 电机所需驱动扭矩的计算公式如下:
已知m=0.5kg,D=50mm,w=2πn。得T1=0.0375N·m。
由于电机所连的卷轴收到绳子的拉力,假设拉力为2N,l=D/2,则 T2 = F * l
T2=0.05N·m。
T=T1+T2=0.0875N·m。
探索者电机其参数如下表所示:
 表3 探索者电机参数
表3 探索者电机参数
对其进行数据转换为国际单位。转换过后各参数如下表所示:
 表4 探索者电机国际单位参数表
表4 探索者电机国际单位参数表
由上表可知大小舵机均满足要求,故暂定选择大型舵机。
3.3 整体三维模型
该实验平台可大致分为三部分:静平台、动平台、驱动模块。其中驱动模块又分为六部分,各部分由电机通过联轴器连接卷轴组成,分散放置在静平台六个不同位置,通过绳索将卷轴和动平台连接在一起,其整体三维模型如下图所示:
 并联索驱机器人实验平台三维模型
并联索驱机器人实验平台三维模型
4. 结论与展望
4.1 结论
按照设计的要求,确定了该并联索驱机器人模块化实验平台的一个整体设计和解决方案,"探索者"模块化的机器人平台已经完成了该实验平台实物的搭建,对该实验平台结构进行了结构和运动学分析,在此基础上对本次设计的多自由度并联机器人结构进行了实验,并且已经做了该实验机构的一些基础性研究工作。其具体的内容包括:
① 通过对几种方案的结构对比分析,确定了所设计的实验平台为六根绳索驱动的五自由度并联机构,然后通过Solidworks软件建立了三维模型图,基于“探索者”模块化机器人平台提供的构件,并且根据三维模型图搭建出机械本体机构。
② 基于D-H法得到了该机构的位置反解的解析表达式,并通过MATLAB的运动学分析仿真对该机构的位置反解和速度反解进行了的分析,验证了该运动模型的可行性。
③ 实验得出了该实验平台的实际运行时的结果,验证了该实验平台对路径规划实现的的可行性,分析了该实验平台在工作时的误差,对其结构和程序进行了进一步的研究和思考。
4.2 展望
完成了并联索驱机器人实验平台的设计以参加大赛,基本达到了预期的设计要求,并且经过不断地程序调试,验证了该样机的工作能力。但是由于时间有限,并且外来干扰因素影响较大,本设计还有许多不足之处。例如,在绳索索点的布局以及轨迹规划程序方面还不够完善,仍需进一步的学习研究。
目前在索驱动并联机构还存在着诸多相关的理论与技术上的问题,这些都是亟待去深入地研究和解决,其中,运动学的正解、工作空间的求解以及对绳索奇异性的分析等问题就是限制索驱动并联机器人领域快速发展的三个重要问题。针对本文开发的六索驱动并联机器人的实验平台而言,虽然已经做了深入的理论研究和仿真分析,但仍存在着许多方面亟待进一步的研究和改进。理论是实践的基础,并联索驱机构的广泛应用需要更深入的理论研究来支持,运动轨迹规划的算法需要进一步改进。
参考文献
[1] Hamid D.Taghirad.并联机器人——机构学与控制[M].北京:机械工业出版2018.34-67
[2] 黄佳怡.柔索驱动并联机器人的理论与其应用研究[D]:[硕士学位论文].南京:南京航空航天大学,2010
[3] Landsberger SE.Design and construction of a cable-controlled parallel link manipulator[J].Robotics, IEEE Transactions on,1984, 13(2):173-182
[4] Dagalakis N.G, Albus J.S, Wang B.L,Unger J, Lee J.D. Stiffness Study of a Parallel Link Robot Crane for Ship-building Applic ations[J]. ASME Journal of Offshore Mechanics and Arctic Engineering,1989,16(21):175-194
[5] BORGSTROMP H,BORGST ROMNP,STEALEYMJ,et al.Design and implementation of NIMS3D a 3-D cabled robot for actuated sensing applic ations [J]. Robotics, IEEE Transactions on, 2009, 25(2) : 325- 339
[6]S.Q. Fang, D. Franitza, M.Toilo, et al. Motion Control of a Tendon Based Parallel Manipulator Using Optimal Tension Distribution[J].IEEE/ASME Transactions on Mechatronics,2004,9(3) :561-568
[7] K.Maeda,Tadokoro,Takamori, et al.Design of a Redundant Wire Driven Parallel Robot WARP Manipulator[C]:Proceedings of the 1999 IEEE International Conference on Robotics&Automation, Detroit, Michigan, USA,1999.895-900
[8] GMroz, L. Notash.Design and Prototype of Parallel Wire Actuated Robots With a Constraining Linkage[J]. Journal of Robotic Systems,2004, 91(19) :677-687
[9] TEMPEL P, MIERMEISTER P,LECHLER A,etal.Modelling of Kinematics and Dynamics of the IPAnema 3 Cable Robot for Simulative Analysis[J].Applied Mechanics & Materials, 2015,3(13):78-94
[10] FRISOLI A,SALSEDO F, BERGAMASCOM.Design of a new tendon driven haptic interface with six degrees of freedom[C].Proceedings of the Robot and Human Interaction,1999 RO-MAN'99 8th IEEE International Workshopon, .IEEE,1999.264-285
[11] Paul Bosscher,Robert L.Williams,L.Cable-suspended robotic contour crafting system[J].Sebastian Bryson,Daniel Castro- Lacouture.Automation in Construction.2007,9(1):163-181
[12] Robert L.Williams II,Paolo Gallina.Translational Planar Cable-Direct-Driven Robots[J].Journal of Intelligent and Robotic Systems,2003,4(1):94-113
[13] S-R Oh,J-C Ryu,SK Agrawal.Dynamics and Control of a Helicopter Carrying a Payload Using a Cable-Suspended Robot[J].Journal of Mechanical Design,2006,3(11):238-241
[14] Jason Pusey,Abbas Fattah,Sunil Agrawal,Elena Messina.Design and workspace analysis of a 6–6 cable-39 suspended parallel robot[J].Mechanism and Machine Theory.2004,13(7):201-224
[15] BEERRF,NAUJOKASC,BACHRACHB,et al.Development and evaluation of a gravity compensated training environment for robotic rehabilitation of post-stroke reaching[C].Proceedings of the 2008 2nd IEEE RAS&EMBS International Conference on Biomedical Robotics and Biomechatronics.IEEE:2008.361-374
[16] MAYHEWD,BACHRACHB,RYMERWZ,et al.Development of the MACARM-a novel cable robot for upper limb neurorehabilitation[C].Proceedings of the 9th International Conference on Rehabilitation Robotics . 2005.264-283
[17] YANG Guilin,SONG H Y,CONG B P.Kinematics and singularity analysis of a planar cable-driven parallel manipulator[C].International Conference on Intelligent Robots and Systems.IEEE, 2004.169-184
[18] MORIZONO T,KURAHASHI K,KAWAMURA S.Realization of a virtual sports training system with parallel wire mechanism[C].Proceedings of the Robotics and Automation.1997 IEEE International Conference:1997,124-139
[19] MING A, HIGUCHI T.Study on multiple degree- of-f reedom positioning mechanism using wires.I: Concept, design and control[J].International Journal of the Japan Society for Precision Engineering, 1994, 28(2) :131-148
[20] Carlo Ferraresi,Marco Paoloni,Stefano Pastorelli,Francesco Pescarmona.A new 6- DOF parallel robotic structure actuated by wires[N].The WiRo-6.3. Journal of Robotic Systems . 2004(13)
[21] MAIER T,WOERNLE C.Inverse kinematics for an underconstrained cable suspension manipulator [M].Advances in Robot Kinematics : Analysis and Control. Springer:1998.97-104
[22] Williams II.CABLE-SUSPENDED HAPTIC INTERFACE[J].Robert L.International Journal of Virtual Reality,1998,131(3):136-153
[23] K. Kozak,Qian Zhou,Jinsong Wang. Static analysis of cable-driven manipulators with non-negligible cable mass[J]. IEEE Transactions on Robotics,2006,124(3):213- 235
[24] BARRETT E G,GOSSELIN C M. Determination of the dynamic workspace of cable-driven planar parallel mechanisms [J]. Journal of Mechanical Design, 2005, 127(2): 242-258
[25] PHAM C B,YEO S H,YANG G,et al.Works pace analysis of fully restrained cable-driven manipulators [J]. Robotics and Autonomous Systems,2009,57(9):901 - 912
[26] 姚蕊,唐晓强,李铁民. 大型射电望远镜馈源定位3T索牵引并联机构分析与设计[J].机械工程学报,2007,16(11):19-36
[27] 张立勋,王克义,张今瑜,王岚. 基于绳索牵引的骨盆运动并联康复机器人的可控性研究[J]. 哈尔滨工程大学学报,2007,23(07):16-30
[28] 王伟方,唐晓强,邵珠峰. 八索立式储罐并联机器人设计及性能优化[J].机械工程学报. 2016,12(09):25-32
[29] 杜敬利,段宝岩,仇原鹰,訾斌. 基于动态松弛法的柔索驱动并联机器人位置正解分析[J].应用力学学报,2007,12(04):62-84
[30] 訾斌,段宝岩,杜敬利. 超大型天线馈源舱柔索支撑结构动力学分析与跟踪控制[J]. 控制理论与应用,2007,24(06):38-42
[31] 王卫东,陈柏,王鹏,陈笋. 基于绳索驱动的并联康复机器人的研究[J].中国制造业信息化, 2012,30(11):43-58
[32] 汪选要, 曹毅, 黄真. 并联柔索牵引机构的运动学分析[J].机械设计与研究.2007, 23(03) : 46-58
[33] 杜敬利, 保宏, 段宝岩. 考虑柔索垂度影响的索牵引并联机器人跟踪控制[J]. 机械工程学报, 2010, 46(3):17-21
更多详情请见:【S042】并联索驱写字机器人