OpenVINS学习6——VioManagerHelper.cpp,VioManagerOptions.h学习与注释
前言
VioManager类里还有VioManagerHelper.cpp,VioManagerOptions.h这两个文件,也包含了一些函数,这次接着看这个 。
整体分析
void VioManager::initialize_with_gt(Eigen::Matrix
给一个状态,然后初始化IMU的状态
bool VioManager::try_to_initialize(const ov_core::CameraData &message)
尝试初始化状态
void VioManager::retriangulate_active_tracks(const ov_core::CameraData &message)
此函数将对当前帧中的所有特征重新进行三角测量。
对于系统当前正在跟踪的所有特征,重新对它们进行三角测量。
这对于需要当前点云(例如闭环)的下游应用程序非常有用。
这将尝试对所有点进行三角测量,而不仅仅是更新中使用的点。
cv::Mat VioManager::get_historical_viz_image()
获取我们拥有的轨迹的清晰可视化图像。
std::vectorEigen::Vector3d VioManager::get_features_SLAM()
返回全局框架中的 3d SLAM 特征。
std::vectorEigen::Vector3d VioManager::get_features_ARUCO()
返回全局框架中的 3d ARUCO 特征。
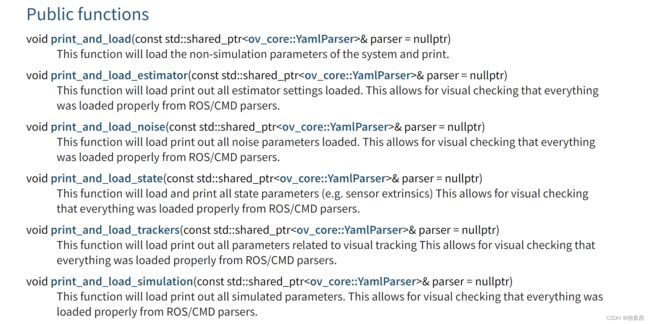
VioManagerOptions.h的主要函数如下:
它分为几个不同的部分:估计器、跟踪器和模拟。如
源码注释
/*
* OpenVINS: An Open Platform for Visual-Inertial Research
* Copyright (C) 2018-2023 Patrick Geneva
* Copyright (C) 2018-2023 Guoquan Huang
* Copyright (C) 2018-2023 OpenVINS Contributors
* Copyright (C) 2018-2019 Kevin Eckenhoff
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see