基于生物地理学算法实现复杂环境下无人机避障三维航迹规划附Matlab代码 论文程序 新手专用
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
内容介绍
无人机技术在近年来得到了快速发展,已经广泛应用于农业、航空、安全监测等领域。然而,随着无人机的使用场景越来越复杂,如何实现在复杂环境下的避障三维航迹规划成为了一个亟待解决的问题。本文将基于生物地理学算法,探讨在复杂环境下实现无人机避障三维航迹规划的方法和技术。
生物地理学算法是一种模拟生物在地理环境中的行为和适应能力的计算模型,通过模拟生物在复杂环境中的行为,可以有效地解决无人机在复杂环境下的避障问题。在实际应用中,我们可以将生物地理学算法应用于无人机的路径规划中,以实现在复杂环境下的避障三维航迹规划。
首先,我们需要构建一个适应于无人机的生物地理学算法模型。该模型需要考虑到无人机的飞行特性和环境的复杂性,以确保无人机能够在复杂环境中安全飞行。在模型构建过程中,我们需要考虑到无人机的飞行高度、速度、机动性等因素,以及环境中的障碍物、地形等因素,以确保生成的航迹能够有效地避开障碍物并安全地飞行。
其次,我们需要设计一个有效的路径规划算法,以实现在复杂环境下的无人机避障三维航迹规划。在路径规划算法设计过程中,我们可以借鉴生物地理学算法中的行为模式和适应能力,以确保无人机能够在复杂环境中灵活地避开障碍物并安全地飞行。同时,我们还需要考虑到无人机的飞行效率和能耗等因素,以确保生成的航迹能够在保证安全的前提下尽可能地节约能源。
最后,我们需要对设计的无人机避障三维航迹规划系统进行实地测试和验证。在实地测试过程中,我们需要考虑到不同环境条件下的无人机飞行情况,以验证设计的航迹规划系统在复杂环境下的可行性和有效性。通过实地测试和验证,我们可以进一步优化和改进设计的航迹规划系统,以适应不同环境条件下的无人机飞行需求。
综上所述,基于生物地理学算法实现复杂环境下无人机避障三维航迹规划是一个具有挑战性和前景的研究方向。通过构建适应于无人机的生物地理学算法模型、设计有效的路径规划算法,以及进行实地测试和验证,我们可以实现在复杂环境下的无人机避障三维航迹规划,为无人机在复杂环境中的应用提供技术支持和保障。希望本文的内容能够对相关领域的研究和实践工作有所帮助,推动无人机技术在复杂环境中的应用和发展。
部分代码
function DrawPic(result1,data,str)figureplot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)hold onplot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',10)for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);x0=ceil(x/data.unit(1))*data.unit(1);y0=ceil(y/data.unit(2))*data.unit(2);z0=ceil(z/data.unit(3))*data.unit(3);long0=ceil(long/data.unit(1))*data.unit(1);wide0=ceil(wide/data.unit(2))*data.unit(2);pretty0=ceil(pretty/data.unit(3))*data.unit(3);[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);endlegend('起点','终点','location','north')grid on%axis equalxlabel('x(km)')ylabel('y(km)')zlabel('z(km)')title([str, '最优结果:', num2str(result1.fit)])% figure% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% hold on% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...% 'MarkerEdgeColor','k',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% for i=1:data.numObstacles% x=1+data.Obstacle(i,1);% y=1+data.Obstacle(i,2);% z=1+data.Obstacle(i,3);% long=data.Obstacle(i,4);% wide=data.Obstacle(i,5);% pretty=data.Obstacle(i,6);%% x0=ceil(x/data.unit(1))*data.unit(1);% y0=ceil(y/data.unit(2))*data.unit(2);% z0=ceil(z/data.unit(3))*data.unit(3);% long0=ceil(long/data.unit(1))*data.unit(1);% wide0=ceil(wide/data.unit(2))*data.unit(2);% pretty0=ceil(pretty/data.unit(3))*data.unit(3);% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);% end% legend('起点','终点','location','north')% grid on% xlabel('x(km)')% ylabel('y(km)')% zlabel('z(km)')% title([str, '最优结果:', num2str(result1.fit)])end
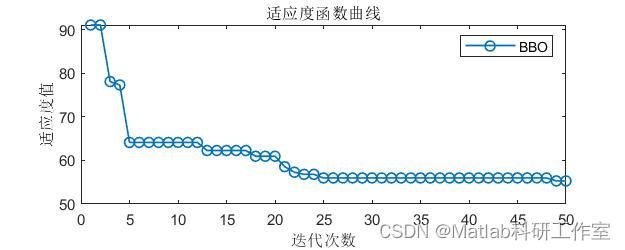
⛳️ 运行结果


参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1]刘艳,李文波,刘新彪,等.复杂环境下无人机三维航迹规划及避障算法[J].电光与控制, 2023, 30(5):93-98.