基于蜣螂优化算法DBO实现复杂山地地形无人机路径规划附matlab实现 注释清楚,干货满满,直接运行
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
内容介绍
无人机技术的快速发展使得无人机在各个领域都得到了广泛的应用,其中无人机的路径规划技术一直是研究的热点之一。在复杂的山地地形中,无人机路径规划面临着诸多挑战,如何有效地规划无人机的路径成为了研究者们关注的焦点。本文将介绍一种基于蜣螂优化算法(DBO)实现复杂山地地形无人机路径规划的方法。
首先,让我们来了解一下蜣螂优化算法(DBO)。蜣螂优化算法是一种模拟蜣螂觅食行为的智能优化算法,它模拟了蜣螂在寻找食物过程中释放信息素、寻找最优路径的行为。通过模拟这种行为,蜣螂优化算法可以有效地应用于路径规划问题中,尤其是在复杂地形中的路径规划问题。
在实现无人机路径规划时,首先需要获取山地地形的相关数据,包括地形的高程信息、地形的坡度信息等。这些数据将作为路径规划的基础,通过对这些数据进行分析和处理,可以得到适合无人机飞行的路径规划方案。蜣螂优化算法可以利用这些地形数据,通过模拟蜣螂的觅食行为,寻找出最优的飞行路径。
在实际的路径规划过程中,需要考虑到诸多因素,如地形的陡峭程度、地形的不规则性、风力的影响等。这些因素都会对无人机的飞行路径产生影响,因此需要在路径规划中进行充分的考虑和分析。蜣螂优化算法作为一种智能优化算法,可以在考虑这些因素的基础上,寻找出最优的路径规划方案。
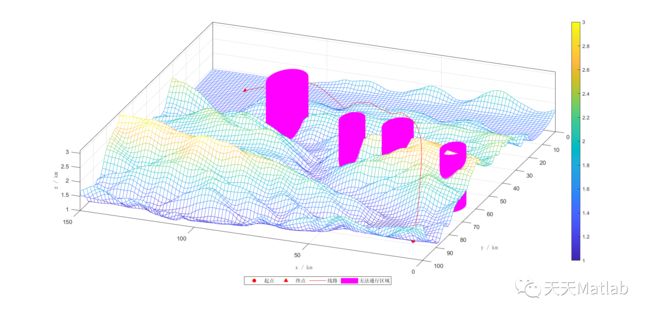
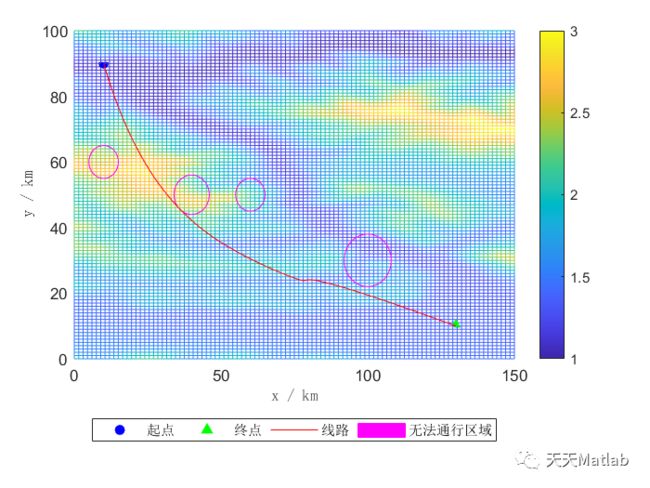
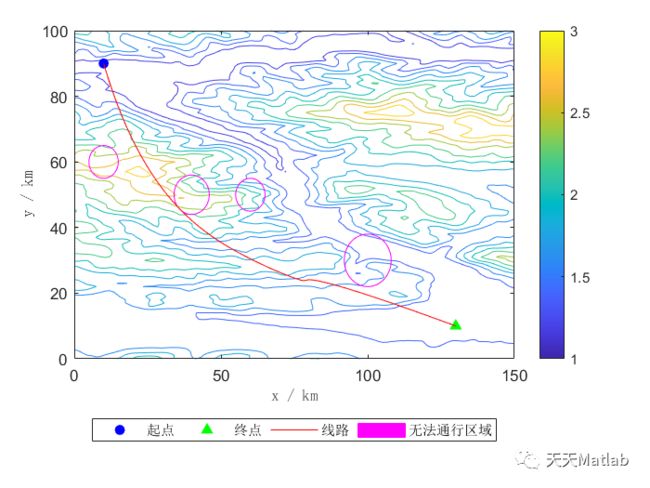
通过实际的仿真实验,我们可以验证蜣螂优化算法在复杂山地地形中无人机路径规划的有效性。实验结果表明,基于蜣螂优化算法的无人机路径规划方法可以在复杂地形中取得较好的效果,能够有效地规避地形的障碍物,保证无人机的安全飞行。
总之,基于蜣螂优化算法实现复杂山地地形无人机路径规划是一种有效的方法,它充分利用了蜣螂优化算法的智能优化特性,在路径规划中取得了良好的效果。未来,我们可以进一步研究和改进这种方法,使其能够更好地适用于更加复杂的地形环境,为无人机的应用提供更加可靠的路径规划方案。
部分代码
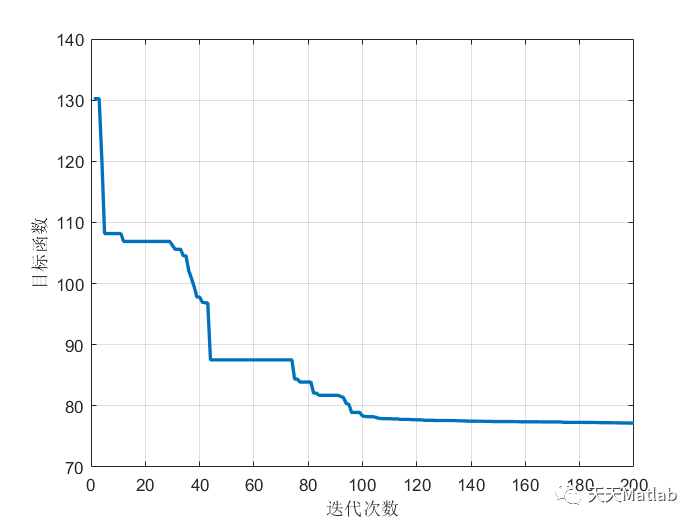
% Plot Solutionset(gcf, 'unit' ,'centimeters' ,'position',[5 2 25 15 ]);PlotSolution( BestSol , BestCost ,model)figuremesh( model.x_data , model.y_data , model.z_data ); hold oncolorbar; box on ,set(gcf,'Color',[1 1 1]);% set(gcf, 'unit' , 'centimeters','position' , [2 2 30 15]);h3= plot3( BestSol.sol.xx , BestSol.sol.yy , BestSol.sol.zz , '-r'); hold on% temp = 10^-2 ;h1 = plot3( model.xs, model.ys, model.zs, 'o' , 'MarkerEdgeColor','r', ...'MarkerFaceColor','r'); hold onh2 = plot3( model.xt , model.yt , model.zt, '^' , 'MarkerEdgeColor','r', ...'MarkerFaceColor','r'); hold onif isfield( model ,'Barrier')for ind = 1: model.Num_Barrier[X,Y,Z] = cylinder( model.Barrier(ind, 3) ,100);h4= surf(X+model.Barrier(ind, 1),Y+model.Barrier(ind, 2), model.zmin+Z*( max(model.z_data(:))- model.zmin) ) ; hold onset(h4, 'edgecolor','m','facecolor', 'm') ;endendif ~isfield( model ,'Barrier')legend( [ h1 , h2 , h3] , '起点' , '终点' , '线路', 'Location','southoutside' , 'Orientation','horizontal')elselegend( [ h1 , h2 , h3 h4] , '起点' , '终点' , '线路' , '无法通行区域' , 'Location','southoutside', 'Orientation','horizontal')endxlabel('x / km','fontsize',10 ,'fontname','宋体');ylabel('y / km','fontsize',10 ,'fontname','宋体');zlabel('z / km','fontsize',10 ,'fontname','宋体');set(gca, 'xlim' , [ model.xmin model.xmax]) ;set(gca, 'ylim' , [ model.ymin model.ymax]) ;axis tightaxis normalhold offset(gca, 'cameraposition', [-337 , 0 , 14.2])%%if ~isfield( model ,'Barrier')legend( [ h1 , h2 , h3] , '起点' , '终点' , '线路', 'Location','southoutside' , 'Orientation','horizontal')elselegend( [ h1 , h2 , h3 h4] , '起点' , '终点' , '线路' , '无法通行区域' , 'Location','southoutside', 'Orientation','horizontal')endxlabel('x / km','fontsize',10 ,'fontname','宋体');ylabel('y / km','fontsize',10 ,'fontname','宋体');zlabel('z / km','fontsize',10 ,'fontname','宋体');set(gca, 'xlim' , [ model.xmin model.xmax]) ;set(gca, 'ylim' , [ model.ymin model.ymax]) ;axis tightaxis normalhold off%% 收敛曲线figure% semilogy( BestSol.BestCost ,'LineWidth',2);plot( BestCost ,'LineWidth',2);xlabel('迭代次数');ylabel('目标函数');grid on;% set(gca,'XLim',[0 BestSol.MaxIt]);%X轴的数据显示范围
⛳️ 运行结果
参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1] 张涛,李少波,张安思,等.基于改进人工鱼群算法的复杂地貌无人机三维路径规划[J].科学技术与工程, 2023.
[2] 张涛,李少波,张安思,等.基于改进人工鱼群算法的复杂地貌无人机三维路径规划[J].科学技术与工程, 2023, 23(10):4433-4439.
[3] 王蕾,伦志新,葛超,等.基于改进蛇优化算法的无人机三维路径规划方法:202310495892[P][2023-12-01].