[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(1) 质量刚体的在坐标系下运动
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。
2024年底本人学位论文发表后方可摘抄
若有帮助请引用
本文参考:
黎 旭,陈 强 洪,甄 文 强 等.惯 性 张 量 平 移 和 旋 转 复 合 变 换 的 一 般 形 式 及 其 应 用[J].工 程 数 学 学 报,2022,39(06):1005-1011.
食用方法
质量点的动量与角动量
刚体的动量与角动量——力与力矩的关系
惯性矩阵的表达与推导——在刚体运动过程中的作用
惯性矩阵在不同坐标系下的表达
务必自己推导全部公式,并理解每个符号的含义
机构运动学与动力学分析与建模 Ch00-2质量刚体的在坐标系下运动Part1
- 2. 质量刚体的在坐标系下运动
-
- 2.1 质量点 Mass Partical 的状态
- 2.2 运动刚体的状态
-
- 2.2.1 刚体的质心Center of Mass——点 G G G或点 C o M CoM CoM
- 2.2.2 刚体的动量矩定理 theorem of moment of momentum
2. 质量刚体的在坐标系下运动
2.1 质量点 Mass Partical 的状态
对于质量点而言,其自身在笛卡尔坐标系中的状态仅包括运动状态。由热力学所引起自身的温度变化状态,由此产生的体积变化状态,或者自身亮度的状态变化等,都认为不会对运动状态产生干扰,即将某一空间实体等效为质量点,此时的笛卡尔坐标系所表示的状态空间就是三维空间。
由此,将质量点运动状态的改变视为力对质量点的作用:
F ⃗ P F = d p ⃗ P F d t = d ( m V ⃗ P F ) d t = d m d t ↗ 0 V ⃗ P F + d V ⃗ P F d t m = m a ⃗ P F \vec{F}_{\mathrm{P}}^{F}=\frac{\mathrm{d}\vec{p}_{\mathrm{P}}^{F}}{\mathrm{dt}}=\frac{\mathrm{d}\left( m\vec{V}_{\mathrm{P}}^{F} \right)}{\mathrm{dt}}=\frac{\mathrm{d}m}{\mathrm{dt}}_{\nearrow 0}\vec{V}_{\mathrm{P}}^{F}+\frac{\mathrm{d}\vec{V}_{\mathrm{P}}^{F}}{\mathrm{dt}}m=m\vec{a}_{\mathrm{P}}^{F} FPF=dtdpPF=dtd(mVPF)=dtdm↗0VPF+dtdVPFm=maPF
τ ⃗ P F = d h ⃗ P F d t = d ( m ⋅ R ⃗ P F × V ⃗ P F ) d t = d ( R ⃗ P F × V ⃗ P F ) d t m = [ ( d R ⃗ P F d t × V ⃗ P F ) ↗ 0 + R ⃗ P F × d V ⃗ P F d t ] m = R ⃗ P F × F ⃗ P F = R ⃗ P F × d p ⃗ P F d t \begin{split} \vec{\tau}_{\mathrm{P}}^{F}&=\frac{\mathrm{d}\vec{h}_{\mathrm{P}}^{F}}{\mathrm{dt}}=\frac{\mathrm{d}\left( m\cdot \vec{R}_{\mathrm{P}}^{F}\times \vec{V}_{\mathrm{P}}^{F} \right)}{\mathrm{dt}}=\frac{\mathrm{d}\left( \vec{R}_{\mathrm{P}}^{F}\times \vec{V}_{\mathrm{P}}^{F} \right)}{\mathrm{dt}}m \\ &=\left[ \left( \frac{\mathrm{d}\vec{R}_{\mathrm{P}}^{F}}{\mathrm{dt}}\times \vec{V}_{\mathrm{P}}^{F} \right) _{\nearrow 0}+\vec{R}_{\mathrm{P}}^{F}\times \frac{\mathrm{d}\vec{V}_{\mathrm{P}}^{F}}{\mathrm{dt}} \right] m=\vec{R}_{\mathrm{P}}^{F}\times \vec{F}_{\mathrm{P}}^{F}=\vec{R}_{\mathrm{P}}^{F}\times \frac{\mathrm{d}\vec{p}_{\mathrm{P}}^{F}}{\mathrm{dt}} \end{split} τPF=dtdhPF=dtd(m⋅RPF×VPF)=dtd(RPF×VPF)m= (dtdRPF×VPF)↗0+RPF×dtdVPF m=RPF×FPF=RPF×dtdpPF
如果说动量是表述物体运动状态的量,那么角动量就是描述物体旋转状态的量;如果说力是改变物体运动状态的量,那么扭矩就是改变物体旋转状态的量。
认为质量点的质量不发生改变:
- 质量点的动量
Linear Momentum: p ⃗ P F \vec{p}_{\mathrm{P}}^{F} pPF——点 P P P 在固定坐标系 { F } \left\{ F \right\} {F}下的动量参数 p ⃗ P F = m V ⃗ P F \vec{p}_{\mathrm{P}}^{F}=m\vec{V}_{\mathrm{P}}^{F} pPF=mVPF - 质量点的
角动量Angular Momentum: h ⃗ P / O F \vec{h}_{\mathrm{P}/\mathrm{O}}^{F} hP/OF——点 P P P 在固定坐标系 { F } \left\{ F \right\} {F}下,相对于点 O O O 的角动量参数(又可称为动量矩)
h ⃗ P / O F = R ⃗ O P F × p ⃗ P F = R ⃗ O P F × ( m V ⃗ P F ) = m ⋅ ( R ⃗ P F − R ⃗ O F ) × V ⃗ P F = h ⃗ P F − m ⋅ R ⃗ O F × V ⃗ P F \vec{h}_{\mathrm{P}/\mathrm{O}}^{F}=\vec{R}_{\mathrm{OP}}^{F}\times \vec{p}_{\mathrm{P}}^{F}=\vec{R}_{\mathrm{OP}}^{F}\times \left( m\vec{V}_{\mathrm{P}}^{F} \right) =m\cdot \left( \vec{R}_{\mathrm{P}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right) \times \vec{V}_{\mathrm{P}}^{F}=\vec{h}_{\mathrm{P}}^{F}-m\cdot \vec{R}_{\mathrm{O}}^{F}\times \vec{V}_{\mathrm{P}}^{F} hP/OF=ROPF×pPF=ROPF×(mVPF)=m⋅(RPF−ROF)×VPF=hPF−m⋅ROF×VPF
![[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(1) 质量刚体的在坐标系下运动_第1张图片](http://img.e-com-net.com/image/info8/549782a1fd964ac38473d9b678b9db63.jpg)
其中,动量的计算是依据固定坐标系进行描述的,而角动量通常与所选择的运动坐标系有关。令 O O O 为固定坐标系中任意一参考点,此时以点 O O O 计算点 P P P 的扭矩 τ ⃗ P / O F \vec{\tau}_{\mathrm{P}/\mathrm{O}}^{F} τP/OF为:
τ ⃗ P / O F = R ⃗ O P F × F ⃗ P F = R ⃗ O P F × d p ⃗ P F d t = d ( R ⃗ O P F × p ⃗ P F ) d t − d ( R ⃗ O P F ) d t × p ⃗ P F = d ( R ⃗ O P F × p ⃗ P F ) d t − d ( R ⃗ P F − R ⃗ O F ) d t × p ⃗ P F = d h ⃗ P / O F d t + V ⃗ O F × p ⃗ P F \begin{split} \vec{\tau}_{\mathrm{P}/\mathrm{O}}^{F}&=\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F}=\vec{R}_{\mathrm{OP}}^{F}\times \frac{\mathrm{d}\vec{p}_{\mathrm{P}}^{F}}{\mathrm{dt}}=\frac{\mathrm{d}\left( \vec{R}_{\mathrm{OP}}^{F}\times \vec{p}_{\mathrm{P}}^{F} \right)}{\mathrm{dt}}-\frac{\mathrm{d}\left( \vec{R}_{\mathrm{OP}}^{F} \right)}{\mathrm{dt}}\times \vec{p}_{\mathrm{P}}^{F} \\ &=\frac{\mathrm{d}\left( \vec{R}_{\mathrm{OP}}^{F}\times \vec{p}_{\mathrm{P}}^{F} \right)}{\mathrm{dt}}-\frac{\mathrm{d}\left( \vec{R}_{\mathrm{P}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right)}{\mathrm{dt}}\times \vec{p}_{\mathrm{P}}^{F}=\frac{\mathrm{d}\vec{h}_{\mathrm{P}/\mathrm{O}}^{F}}{\mathrm{dt}}+\vec{V}_{\mathrm{O}}^{F}\times \vec{p}_{\mathrm{P}}^{F} \end{split} τP/OF=ROPF×FPF=ROPF×dtdpPF=dtd(ROPF×pPF)−dtd(ROPF)×pPF=dtd(ROPF×pPF)−dtd(RPF−ROF)×pPF=dtdhP/OF+VOF×pPF
由上式可知,当 V ⃗ O F ∥ V ⃗ P F \vec{V}_{\mathrm{O}}^{F} \parallel \vec{V}_{\mathrm{P}}^{F} VOF∥VPF(特别是 O O O与 P P P为同一点)时,或 V ⃗ O F = 0 \vec{V}_{\mathrm{O}}^{F}=0 VOF=0(相当于坐标系下一定点)时,有: τ ⃗ P O = d h ⃗ P O d t \vec{\tau}_{\mathrm{P}}^{O}=\frac{\mathrm{d}\vec{h}_{\mathrm{P}}^{O}}{\mathrm{dt}} τPO=dtdhPO
此时,已知: R ⃗ O P F × d ( m V ⃗ P F ) d t = R ⃗ O P F × F ⃗ P F \vec{R}_{\mathrm{OP}}^{F}\times \frac{\mathrm{d}\left( m\vec{V}_{\mathrm{P}}^{F} \right)}{\mathrm{d}t}=\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F} ROPF×dtd(mVPF)=ROPF×FPF,对 h ⃗ P / O F \vec{h}_{\mathrm{P}/\mathrm{O}}^{F} hP/OF求导,则有:
d h ⃗ P / O F d t = d R ⃗ O P F d t × p ⃗ P F + R ⃗ O P F × d p ⃗ P F d t = m ⋅ d R ⃗ O P F d t × V ⃗ P F + m ⋅ R ⃗ O P F × d V ⃗ P F d t = m ⋅ d ( R ⃗ P F − R ⃗ O F ) d t × V ⃗ P F + m ⋅ R ⃗ O P F × d V ⃗ P F d t = m ⋅ d ( R ⃗ P F − R ⃗ O F ) d t × V ⃗ P F + R ⃗ O P F × F ⃗ P F \begin{split} \frac{\mathrm{d}\vec{h}_{\mathrm{P}/\mathrm{O}}^{F}}{\mathrm{d}t}&=\frac{\mathrm{d}\vec{R}_{\mathrm{OP}}^{F}}{\mathrm{d}t}\times \vec{p}_{\mathrm{P}}^{F}+\vec{R}_{\mathrm{OP}}^{F}\times \frac{\mathrm{d}\vec{p}_{\mathrm{P}}^{F}}{\mathrm{d}t}=m\cdot \frac{\mathrm{d}\vec{R}_{\mathrm{OP}}^{F}}{\mathrm{d}t}\times \vec{V}_{\mathrm{P}}^{F}+m\cdot \vec{R}_{\mathrm{OP}}^{F}\times \frac{\mathrm{d}\vec{V}_{\mathrm{P}}^{F}}{\mathrm{d}t} \\ &=m\cdot \frac{\mathrm{d}\left( \vec{R}_{\mathrm{P}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right)}{\mathrm{d}t}\times \vec{V}_{\mathrm{P}}^{F}+m\cdot \vec{R}_{\mathrm{OP}}^{F}\times \frac{\mathrm{d}\vec{V}_{\mathrm{P}}^{F}}{\mathrm{d}t} \\ &=m\cdot \frac{\mathrm{d}\left( \vec{R}_{\mathrm{P}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right)}{\mathrm{d}t}\times \vec{V}_{\mathrm{P}}^{F}+\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F} \end{split} dtdhP/OF=dtdROPF×pPF+ROPF×dtdpPF=m⋅dtdROPF×VPF+m⋅ROPF×dtdVPF=m⋅dtd(RPF−ROF)×VPF+m⋅ROPF×dtdVPF=m⋅dtd(RPF−ROF)×VPF+ROPF×FPF
可见,同上所述:当 V ⃗ O F = 0 \vec{V}_{\mathrm{O}}^{F}=0 VOF=0时,即 d h ⃗ P / O F d t = m ⋅ ( V ⃗ P F − V ⃗ O F ↗ 0 ) × V ⃗ P F + R ⃗ O P F × F ⃗ P F = R ⃗ O P F × F ⃗ P F \frac{\mathrm{d}\vec{h}_{\mathrm{P}/\mathrm{O}}^{F}}{\mathrm{d}t}=m\cdot \left( \vec{V}_{\mathrm{P}}^{F}-{\vec{V}_{\mathrm{O}}^{F}}_{\nearrow 0} \right) \times \vec{V}_{\mathrm{P}}^{F}+\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F}=\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F} dtdhP/OF=m⋅(VPF−VOF↗0)×VPF+ROPF×FPF=ROPF×FPF;当 V ⃗ O F ∥ V ⃗ P F \vec{V}_{\mathrm{O}}^{F} \parallel \vec{V}_{\mathrm{P}}^{F} VOF∥VPF时,即 d h ⃗ P / O F d t = ( m ⋅ ( V ⃗ P F − V ⃗ O F ) × V ⃗ P F ) ↗ 0 + R ⃗ O P F × F ⃗ P F = R ⃗ O P F × F ⃗ P F \frac{\mathrm{d}\vec{h}_{\mathrm{P}/\mathrm{O}}^{F}}{\mathrm{d}t}=\left( m\cdot \left( \vec{V}_{\mathrm{P}}^{F}-\vec{V}_{\mathrm{O}}^{F} \right) \times \vec{V}_{\mathrm{P}}^{F} \right) _{\nearrow 0}+\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F}=\vec{R}_{\mathrm{OP}}^{F}\times \vec{F}_{\mathrm{P}}^{F} dtdhP/OF=(m⋅(VPF−VOF)×VPF)↗0+ROPF×FPF=ROPF×FPF。
因此,对于质点对某定点的动量矩对时间的一阶导数,等于作用力对该定点的矩,即为质点的动量矩定理:
d h ⃗ P / O F i x e d F d t = R ⃗ O F i x e d P F × F ⃗ P F \frac{\mathrm{d}\vec{h}_{\mathrm{P}/\mathrm{O}_{\mathrm{Fixed}}}^{F}}{\mathrm{d}t}=\vec{R}_{\mathrm{O}_{\mathrm{Fixed}}\mathrm{P}}^{F}\times \vec{F}_{\mathrm{P}}^{F} dtdhP/OFixedF=ROFixedPF×FPF
例子1:球杆模型
V ⃗ P F = r ˙ X ⃗ r + r θ ˙ X ⃗ θ a ⃗ P F = ( r ¨ − r θ ˙ 2 ) X ⃗ r + ( 2 r ˙ θ ˙ ) X ⃗ θ \begin{split} \vec{V}_{\mathrm{P}}^{F}&=\dot{r}\vec{X}_{\mathrm{r}}+r\dot{\theta}\vec{X}_{\mathrm{\theta}} \\ \vec{a}_{\mathrm{P}}^{F}&=\left( \ddot{r}-r\dot{\theta}^2 \right) \vec{X}_{\mathrm{r}}+\left( 2\dot{r}\dot{\theta} \right) \vec{X}_{\mathrm{\theta}} \end{split} VPFaPF=r˙Xr+rθ˙Xθ=(r¨−rθ˙2)Xr+(2r˙θ˙)Xθ
h ⃗ P F = R ⃗ P F × p ⃗ P F = r X ⃗ r × ( r ˙ X ⃗ r + r θ ˙ X ⃗ θ ) ⋅ m = m r 2 θ ˙ K ^ τ ⃗ P F = d h ⃗ P F d t = 2 m r ˙ θ ˙ K ^ = R ⃗ P F × F ⃗ P F = ( r X ⃗ r ) × ( ( r ¨ − r θ ˙ 2 ) X ⃗ r + ( 2 r ˙ θ ˙ ) X ⃗ θ ) ⋅ m = R ⃗ P F × ( 2 r ˙ θ ˙ ) X ⃗ θ ⋅ m \begin{split} \vec{h}_{\mathrm{P}}^{F}&=\vec{R}_{\mathrm{P}}^{F}\times \vec{p}_{\mathrm{P}}^{F}=r\vec{X}_{\mathrm{r}}\times \left( \dot{r}\vec{X}_{\mathrm{r}}+r\dot{\theta}\vec{X}_{\mathrm{\theta}} \right) \cdot m=mr^2\dot{\theta}\hat{K} \\ \vec{\tau}_{\mathrm{P}}^{F}&=\frac{\mathrm{d}\vec{h}_{\mathrm{P}}^{F}}{\mathrm{dt}}=2m\dot{r}\dot{\theta}\hat{K}=\vec{R}_{\mathrm{P}}^{F}\times \vec{F}_{\mathrm{P}}^{F}=\left( r\vec{X}_{\mathrm{r}} \right) \times \left( \left( \ddot{r}-r\dot{\theta}^2 \right) \vec{X}_{\mathrm{r}}+\left( 2\dot{r}\dot{\theta} \right) \vec{X}_{\mathrm{\theta}} \right) \cdot m \\ &=\vec{R}_{\mathrm{P}}^{F}\times \left( 2\dot{r}\dot{\theta} \right) \vec{X}_{\mathrm{\theta}}\cdot m \end{split} hPFτPF=RPF×pPF=rXr×(r˙Xr+rθ˙Xθ)⋅m=mr2θ˙K^=dtdhPF=2mr˙θ˙K^=RPF×FPF=(rXr)×((r¨−rθ˙2)Xr+(2r˙θ˙)Xθ)⋅m=RPF×(2r˙θ˙)Xθ⋅m
从受力分析的角度来看,小球仅受到了垂直于杆方向的支撑力作用,而在沿杆方向并没有力的作用,但根据小球的加速度方程(\ref{eq:ballrank1})可知,小球具有沿杆方向的运动。前者的描述是基于固定坐标系进行分析,而后者的描述是基于运动坐标系进行的分析,因此两者本质上没有矛盾关系。所谓的科氏加速度与向心力都是在运动坐标系下描述时,由于运动标架的不同,所产生的虚拟力,在实际的固定坐标系中也不参与功的作用。
![[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(1) 质量刚体的在坐标系下运动_第2张图片](http://img.e-com-net.com/image/info8/bd54e79b278c4bf996678c9f92eb295b.jpg)
2.2 运动刚体的状态
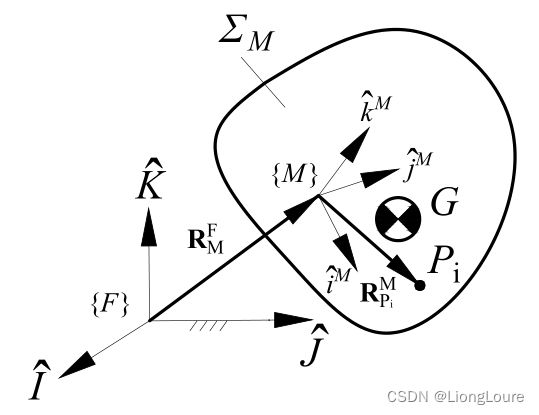
对于运动刚体 Σ M \varSigma _{\mathrm{M}} ΣM而言,需要将其上任意一点 P i P_{\mathrm{i}} Pi在固定坐标系 { F : ( I ^ , J ^ , K ^ ) } \left\{ F:\left( \hat{I},\hat{J},\hat{K} \right) \right\} {F:(I^,J^,K^)}下进行表述。而对于有质量的刚体而言,其最特殊的点就是其等效的质量中心,称为其为质心点 G G G 或 C o M CoM CoM(center of mass)。
2.2.1 刚体的质心Center of Mass——点 G G G或点 C o M CoM CoM
m t o t a l ⋅ R ⃗ G F = ∑ m i ⋅ R ⃗ P i F m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}=\sum{m_{\mathrm{i}}\cdot \vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}} mtotal⋅RGF=∑mi⋅RPiF
对于刚体Rigid Body而言,其可视为 N N N 个质量点的集合,并具有有限体积,且各质量点之间的距离为定值,即:
∥ r ⃗ i − r ⃗ j ∥ = C i j i , j ∈ { 1 , ⋯ , N } \left\| \vec{r}_{\mathrm{i}}-\vec{r}_{\mathrm{j}} \right\| =C_{\mathrm{ij}}\,\, i,j\in \left\{ 1,\cdots ,N \right\} ∥ri−rj∥=Ciji,j∈{1,⋯,N}
其中, r ⃗ i ∈ R 3 \vec{r}_{\mathrm{i}}\in \mathbb{R} ^3 ri∈R3为位置参数, C i j ∈ R C_{\mathrm{ij}}\in \mathbb{R} Cij∈R为距离参数。
刚体在现实中并不存在,只是一种近似,且有: ω F l e x ≫ ω R B = 0 \omega _{\mathrm{Flex}}\gg \omega _{\mathrm{RB}}=0 ωFlex≫ωRB=0。刚体的自然频率Nature Frequency为0,柔性体Flexible Body的自然频率远大于刚体的自然频率。
质量点在空间坐标系中只需要对位置Position进行表征Configurate,而刚体还需要对其姿态Pose进行描述
考虑质量点的动量与角动量方程,首先考虑运动刚体的角动量与动量方程:
{ P ⃗ G F = m t o t a l V ⃗ G F H ⃗ Σ M / O F = ∑ i N R ⃗ O P i F × P ⃗ P i F = ∑ i N h ⃗ P i / O F \begin{cases} \vec{P}_{\mathrm{G}}^{F}=m_{\mathrm{total}}\vec{V}_{\mathrm{G}}^{F}\\ \vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}=\sum_i^N{\vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \vec{P}_{\mathrm{P}_{\mathrm{i}}}^{F}}=\sum_i^N{\vec{h}_{\mathrm{P}_{\mathrm{i}}/\mathrm{O}}^{F}}\\ \end{cases} {PGF=mtotalVGFHΣM/OF=∑iNROPiF×PPiF=∑iNhPi/OF
2.2.2 刚体的动量矩定理 theorem of moment of momentum
对于运动刚体上一微元点 P i \mathrm{P}_{\mathrm{i}} Pi进行力矩分析,则有:
H ⃗ Σ M / O F = ∑ i N h ⃗ P i / O F = ∫ h ⃗ P i / O F = ∫ R ⃗ O P i F × ( d m i ⋅ d R ⃗ P i F d t ) ⇒ d H ⃗ Σ M / O F d t = d ( ∫ R ⃗ O P i F × ( d m i ⋅ d R ⃗ P i F d t ) ) d t = ∫ ( R ⃗ O P i F × ( d m i ⋅ a ⃗ P i F ) ) + ∫ ( ( V ⃗ P i F − V ⃗ O F ) × ( d m i ⋅ V ⃗ P i F ) ) = ∫ ( R ⃗ O P i F × F ⃗ P i F ) − ∫ ( V ⃗ O F × ( d m i ⋅ V ⃗ P i F ) ) = M ⃗ Σ M / O F − V ⃗ O F × P ⃗ Σ M F \begin{split} &\vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}=\sum_i^N{\vec{h}_{\mathrm{P}_{\mathrm{i}}/\mathrm{O}}^{F}}=\int{\vec{h}_{\mathrm{P}_{\mathrm{i}}/\mathrm{O}}^{F}}=\int{\vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \left( \mathrm{d}m_i\cdot \frac{\mathrm{d}\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}}{\mathrm{d}t} \right)} \\ \Rightarrow \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}}{\mathrm{d}t}&=\frac{\mathrm{d}\left( \int{\vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \left( \mathrm{d}m_i\cdot \frac{\mathrm{d}\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}}{\mathrm{d}t} \right)} \right)}{\mathrm{d}t}=\int{\left( \vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \left( \mathrm{d}m_i\cdot \vec{a}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \right)}+\int{\left( \left( \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F}-\vec{V}_{\mathrm{O}}^{F} \right) \times \left( \mathrm{d}m_i\cdot \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \right)} \\ &=\int{\left( \vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \vec{F}_{\mathrm{P}_{\mathrm{i}}}^{F} \right)}-\int{\left( \vec{V}_{\mathrm{O}}^{F}\times \left( \mathrm{d}m_i\cdot \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \right)}=\vec{M}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}-\vec{V}_{\mathrm{O}}^{F}\times \vec{P}_{\Sigma _{\mathrm{M}}}^{F} \end{split} ⇒dtdHΣM/OFHΣM/OF=i∑NhPi/OF=∫hPi/OF=∫ROPiF×(dmi⋅dtdRPiF)=dtd(∫ROPiF×(dmi⋅dtdRPiF))=∫(ROPiF×(dmi⋅aPiF))+∫((VPiF−VOF)×(dmi⋅VPiF))=∫(ROPiF×FPiF)−∫(VOF×(dmi⋅VPiF))=MΣM/OF−VOF×PΣMF
若参考点 O O O为固定坐标系下一固定点,则上式简化为:
d H ⃗ Σ M / O F i x e d F d t = M ⃗ Σ M / O F i x e d F \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}_{\mathrm{Fixed}}}^{F}}{\mathrm{d}t}=\vec{M}_{\Sigma _{\mathrm{M}}/\mathrm{O}_{\mathrm{Fixed}}}^{F} dtdHΣM/OFixedF=MΣM/OFixedF