Windows11 - Ubuntu 双系统及 ROS、ROS2 安装
系列文章目录
前言
一、Windows11 - Ubuntu 双系统安装
硬件信息:
设备名称 DESKTOP-B62D6KE
处理器 13th Gen Intel(R) Core(TM) i5-13500H 2.60 GHz
机带 RAM 40.0 GB (39.8 GB 可用)
设备 ID 7673EF86-8370-41D0-8831-84926668C05A
产品 ID 00331-10000-00001-AA826
系统类型 64 位操作系统, 基于 x64 的处理器
笔和触控 没有可用于此显示器的笔或触控输入
1.1 为 Ubuntu 分配存储空间
右击此电脑 - 管理

计算机管理 - 磁盘管理
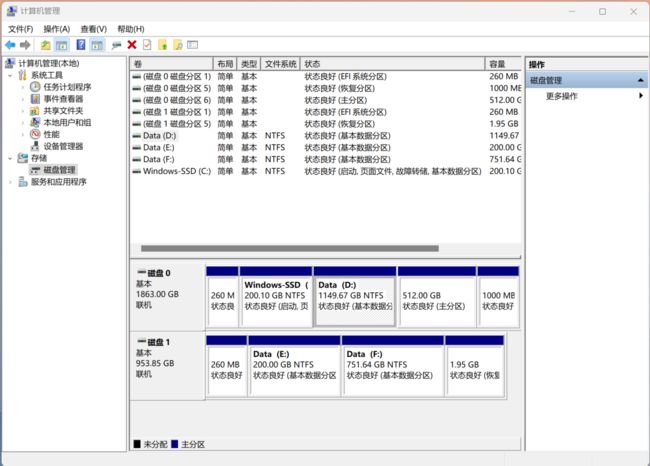
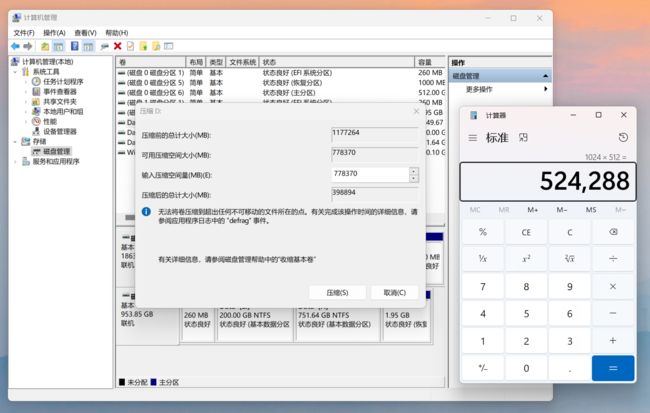
右击将 Ubuntu 安装盘符(如 D:/ ),单击压缩卷。
 为 Ubuntu 分配存储空间,如(1024 * 512 = 524288)
为 Ubuntu 分配存储空间,如(1024 * 512 = 524288)
1.2 安装 Ubuntu
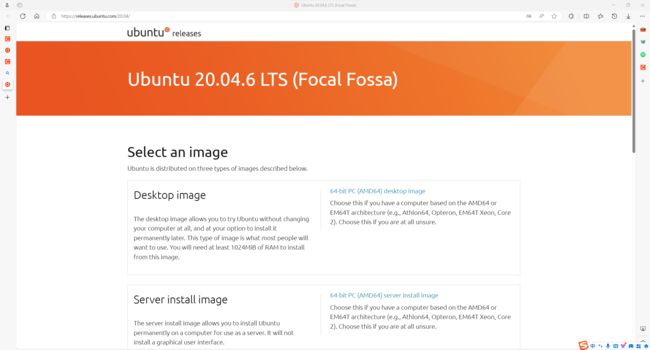
1.2.1 下载 Ubuntu 镜像
您可以在这里下载 Ubuntu 镜像。确保将其保存到个人电脑上的一个可存储的位置!在本教程中,我们将使用 Ubuntu 20.04 版本,该版本使用了新的 Ubuntu 桌面安装程序,该程序将包含在今后发布的所有 Ubuntu 版本中。
1.2.2 创建可引导 U 盘
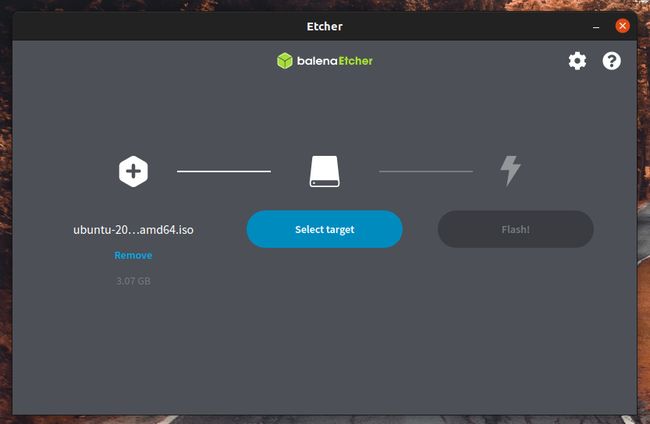
要安装 Ubuntu 桌面,你需要将下载的 ISO 写入 U 盘以创建安装介质。这与复制ISO不同,需要一些定制软件。
在本教程中,我们将使用balenaEtcher,因为它可以在Linux、Windows和Mac OS上运行。选择与您当前操作系统相对应的版本,下载并安装该工具。
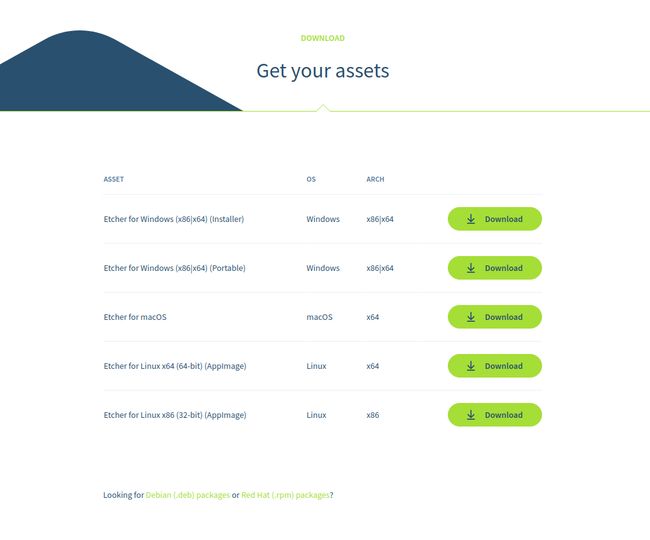
如果你想使用其他工具创建 USB,我们还有 Windows 上的 Rufus、Mac OS 上的 Etcher 和 Ubuntu 上的 Startup Disk Creator 的教程。
选择下载的 ISO,选择 USB 闪存驱动器,然后单击 "Flash!"安装映像。
从 DVD 安装 Ubuntu
也可以通过 DVD 而非 USB 安装 Ubuntu。按照以下指南在 Windows、MacOS 或 Ubuntu 上刻录 Ubuntu 安装 DVD,然后在下一步的启动选项屏幕上选择 CD 驱动器而非 USB 设备。
1.2.3 从 U 盘启动
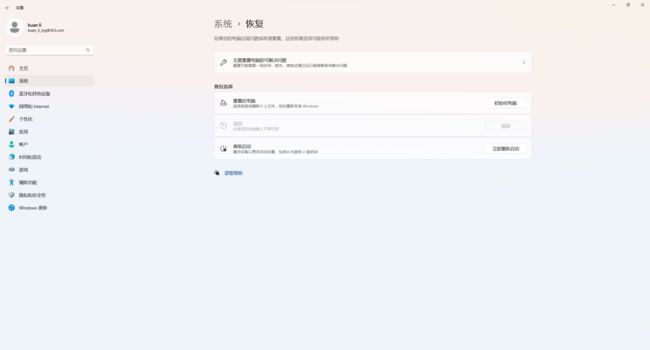
设置 - 恢复 - 高级启动 - 立即重新启动 - 使用设备 - 使用 U 盘启动 Ubuntu。
它应该会自动识别安装介质。如果不能,请尝试在启动过程中按住 F12,然后从系统专用启动菜单中选择 USB 设备。
F12 是调出系统启动菜单最常用的按键,但 Escape、F2 和 F10 也是常用的替代按键。如果你不确定,可以查看系统启动时的简短信息--这通常会告诉你按哪个键可以调出启动菜单。
安装程序初始化后,您将被邀请选择语言
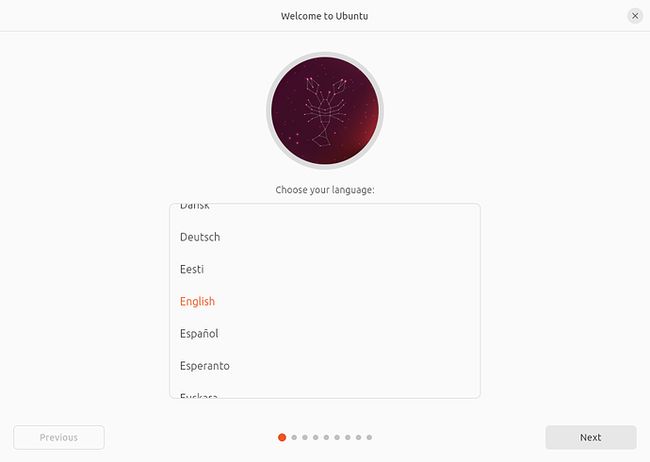 然后就出现了试用或安装 Ubuntu 的选项。
然后就出现了试用或安装 Ubuntu 的选项。
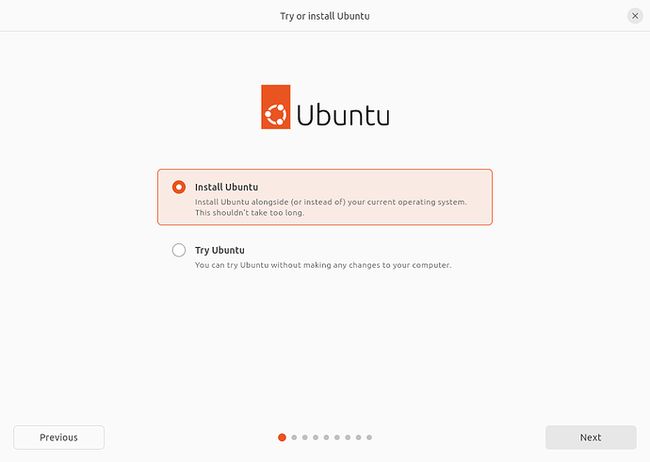
要继续,请单击 "安装 Ubuntu"。
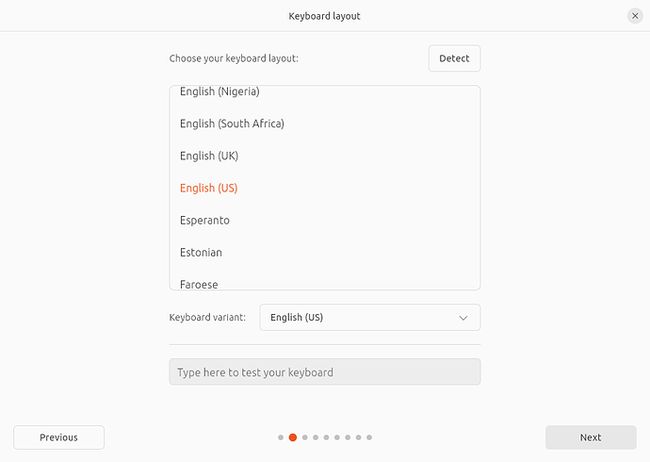
系统会要求你选择键盘布局。选择好后,点击继续。
接下来,系统会要求你连接无线网络,这将允许 Ubuntu 在安装过程中下载更新和第三方驱动程序(如英伟达显卡驱动程序)。连接Wi-Fi(或选择离线)后,我们就可以继续安装设置了。
1.2.4 安装设置
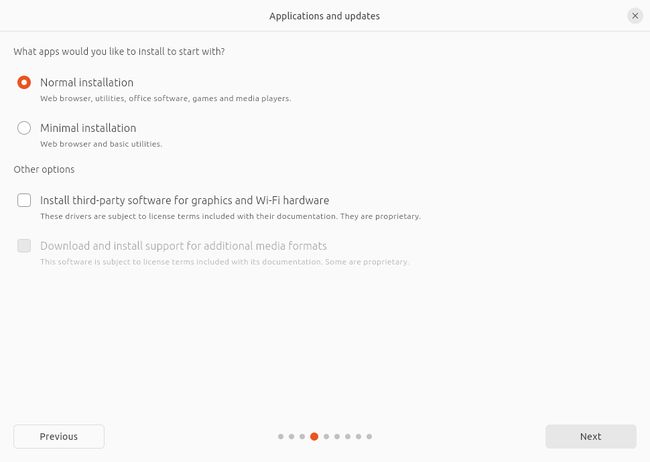
系统会提示你选择 "正常安装 "和 "最小化安装 "选项。对于硬盘较小或不需要太多预装应用程序的用户来说,最小化安装非常有用。
在 "其他 "选项中,系统会提示您下载更新以及第三方软件,以便在安装过程中提高设备支持和性能(例如 Nvidia 显卡驱动程序)。建议同时选中这两个复选框。
1.2.5 安装类型
该界面允许你对安装进行配置。如果你希望 Ubuntu 成为硬盘上唯一的操作系统,请选择 "擦除磁盘并安装 Ubuntu"。
如果你的设备目前已安装了其他操作系统,你将获得更多选项,在安装 Ubuntu 的同时安装该操作系统,而不是取而代之。

让我们花点时间详细回顾一下上述所有选项。
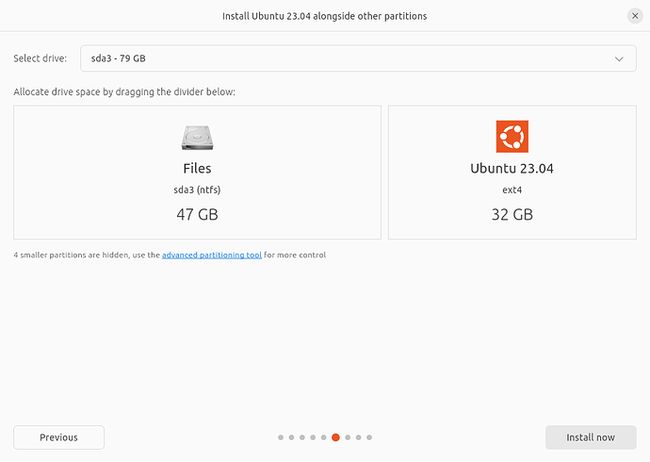
a. 在安装其他操作系统的同时安装 Ubuntu
如果你选择了这个选项,你会看到一个简单的界面,允许你选择要安装Ubuntu的硬盘,并通过滑块来决定你希望Ubuntu使用的磁盘空间大小。可用空间受磁盘现有内容的限制,旨在避免覆盖现有文件。
该视图会自动选择硬盘上最大的分区。如果想进行更精细的控制,你可以切换到手动分区选项,下面会有详细说明。
b. 擦除磁盘并安装 Ubuntu
如果选择此选项,Ubuntu 将占用所选驱动器的全部磁盘空间。
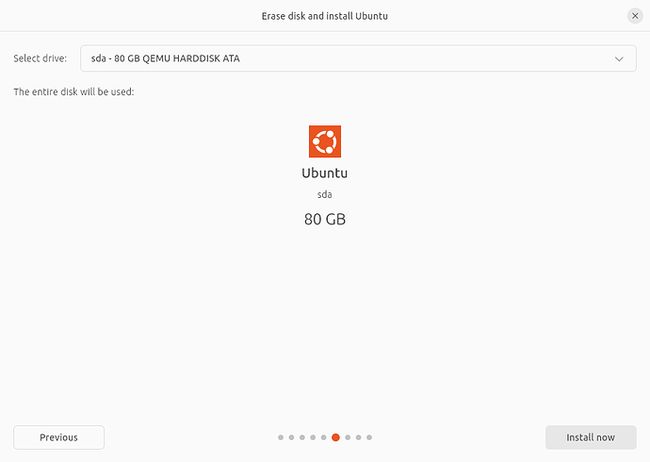
如果你的电脑有多个硬盘驱动器,那么只要它们各自有自己的驱动器,这个选项就能让你在安装 Ubuntu 的同时安装现有的操作系统。在这种情况下,请注意选择正确的硬盘!
该选项还允许你使用 LVM 加密整个硬盘。要做到这一点,请在进入上述界面之前打开高级功能选项,然后选择 "为新安装的 Ubuntu 加密以确保安全"。

LVM 是逻辑卷管理(Logical Volume Management)的缩写。通过在设置过程中使用 LVM,可以在安装后更轻松地创建和管理分区。
在接下来的步骤中,系统会提示你创建一个安全密钥,在使用用户凭据登录之前,你需要在启动时输入该密钥。

如果您选择加密,重要的是不要丢失您的安全密钥!记下它并将其存放在本地系统之外的安全地方。没有它,你将无法恢复数据!
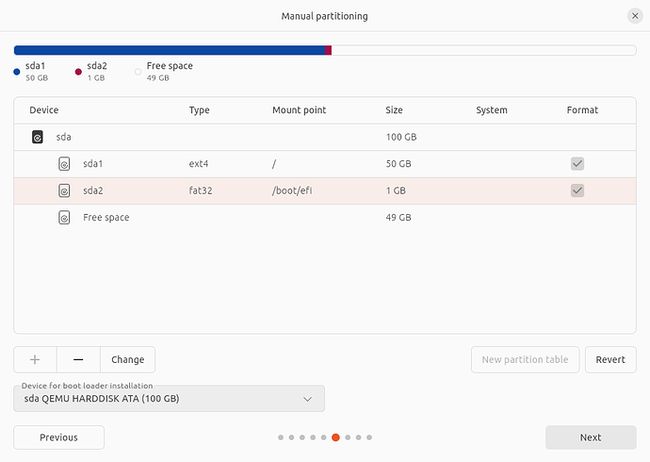
c. 手动分区
手动分区是为高级用户设计的,他们希望根据自己的使用情况创建特定的配置。因此,我们假定这些用户可以轻松使用该界面,本教程将不再详细介绍具体设置。
在这里,用户可以查看所有现有驱动器和分区,并创建和管理新的分区表和配置。
(警告)已启用 Windows BitLocker
如果您的设备启用了 Windows BitLocker 驱动器加密功能,那么 Ubuntu 将无法收集所需的驱动器信息,从而无法在 Windows 环境下安全安装 Ubuntu。如果是这种情况,在重启 Ubuntu 安装程序之前,你会收到在 Windows 中禁用 BitLocker 的提示。
1.2.6 准备安装
无论您选择哪个选项,单击 "下一步 "都会跳转到安装配置摘要,让您有机会在单击 "安装 "之前确认您的设置
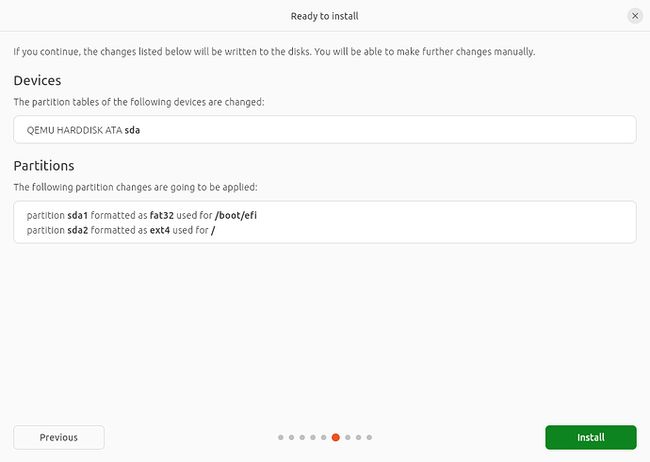
一旦您继续,Ubuntu 将在后台开始安装过程,您将无法返回到此点。
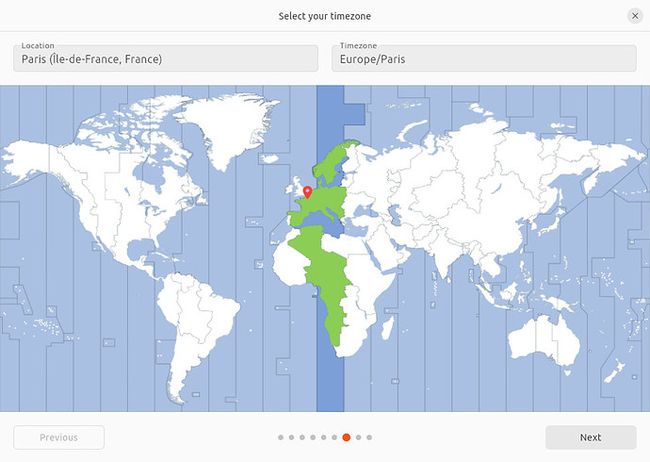
1.2.7 选择您的位置
从地图界面选择您的位置和时区,然后单击 "继续"。如果您已连接互联网,系统将自动检测到这些信息。
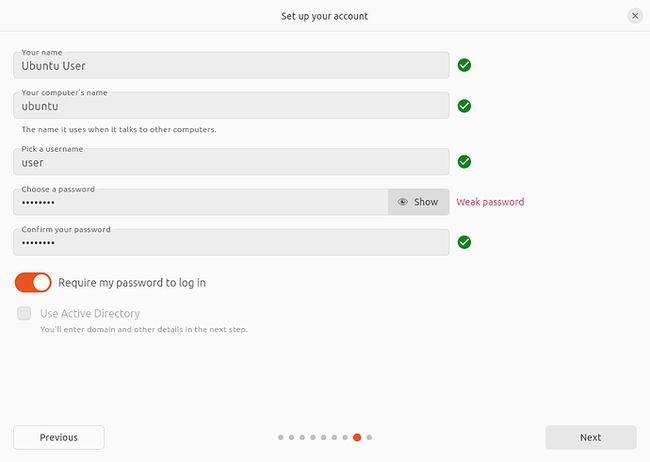
1.2.8 创建登录信息
在此屏幕上,系统会提示您输入您的姓名和您的计算机名称,以显示在网络上。最后,您将创建一个用户名和一个强大的密码。
您可以选择自动登录或要求输入密码。如果您在旅行中使用设备,建议您启用 "要求输入密码才能登录"。
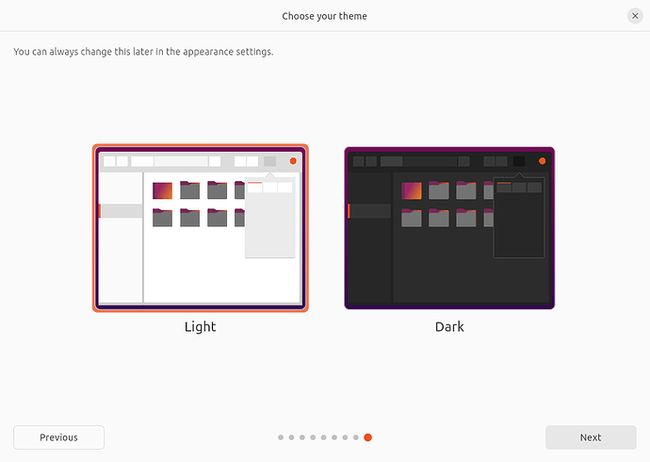
1.2.9 完成安装
最后,你可以选择将桌面从浅色主题切换到深色主题。
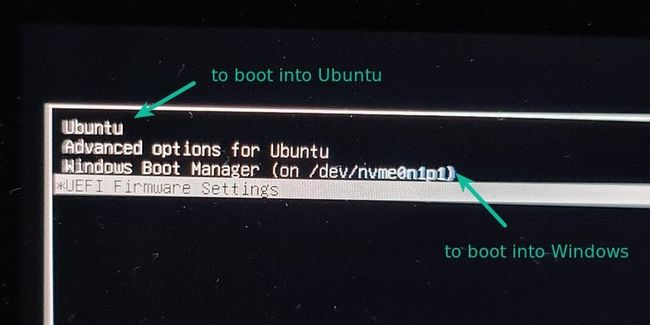
1.2.10 重启
按照提示拔出安装介质,启动电脑
1.2.11 解决时间不同步问题
timedatectl set-local-rtc 1若上述方法无用
sudo ntpdate time.windows.com
sudo hwclock --localtime --systohc
二、安装 ROS、ROS2
2.1 使用清华源 ROS 镜像源安装 ROS
新建 /etc/apt/sources.list.d/ros-latest.list,内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ focal main然后再输入如下命令,信任 ROS 的 GPG Key,并更新索引:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update安装 ROS
sudo apt install ros-noetic-desktop-fullsudo apt install python3-rosdepecho "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc2.2 使用清华源 rosdistro 镜像
在 rosdep 使用流程中,我们会有如下两个步骤
sudo rosdep init
rosdep update我们替换为以下步骤
# 手动模拟 rosdep init
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
sudo curl -o /etc/ros/rosdep/sources.list.d/20-default.list https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
# 为 rosdep update 换源
export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
rosdep update
# 每次 rosdep update 之前,均需要增加该环境变量
# 为了持久化该设定,可以将其写入 .bashrc 中,例如
echo 'export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml' >> ~/.bashrc2.3 使用清华源 ROS2 镜像源安装 ROS2
输入如下命令,下载 ROS 的 GPG Key:
sudo apt install curl gnupg2
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg解决 github.com 或者 raw.githubusercontent.com 打开慢、打不开问题
http://t.csdnimg.cn/InuXQ http://t.csdnimg.cn/InuXQ Ubuntu 20.04
http://t.csdnimg.cn/InuXQ Ubuntu 20.04
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt updateUbuntu 22.04
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt updateUbuntu 20.04 安装 ROS2 Foxy
sudo apt install ros-foxy-desktop python3-argcomplete
sudo apt install ros-dev-tools2.4 ROS ROS2 同时安装
sudo vim ~/.bashrc
#source /opt/ros/noetic/setup.bash
echo "ros noetic(1) or ros2 foxy(2)?"read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/noetic/setup.bash
else
source /opt/ros/foxy/setup.bash
fi