Open3d学习计划——高级篇 12(交互式可视化)–最终章
Open3d学习计划——高级篇 12(交互式可视化)–最终章
本篇教程介绍了Open3d的可视化窗口的交互功能。
# examples/Python/Advanced/interactive_visualization.py
import numpy as np
import copy
import open3d as o3d
def demo_crop_geometry():
print("Demo for manual geometry cropping")
print(
"1) Press 'Y' twice to align geometry with negative direction of y-axis"
)
print("2) Press 'K' to lock screen and to switch to selection mode")
print("3) Drag for rectangle selection,")
print(" or use ctrl + left click for polygon selection")
print("4) Press 'C' to get a selected geometry and to save it")
print("5) Press 'F' to switch to freeview mode")
pcd = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_0.pcd")
o3d.visualization.draw_geometries_with_editing([pcd])
def draw_registration_result(source, target, transformation):
source_temp = copy.deepcopy(source)
target_temp = copy.deepcopy(target)
source_temp.paint_uniform_color([1, 0.706, 0])
target_temp.paint_uniform_color([0, 0.651, 0.929])
source_temp.transform(transformation)
o3d.visualization.draw_geometries([source_temp, target_temp])
def pick_points(pcd):
print("")
print(
"1) Please pick at least three correspondences using [shift + left click]"
)
print(" Press [shift + right click] to undo point picking")
print("2) Afther picking points, press q for close the window")
vis = o3d.visualization.VisualizerWithEditing()
vis.create_window()
vis.add_geometry(pcd)
vis.run() # user picks points
vis.destroy_window()
print("")
return vis.get_picked_points()
def demo_manual_registration():
print("Demo for manual ICP")
source = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_0.pcd")
target = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_2.pcd")
print("Visualization of two point clouds before manual alignment")
draw_registration_result(source, target, np.identity(4))
# pick points from two point clouds and builds correspondences
picked_id_source = pick_points(source)
picked_id_target = pick_points(target)
assert (len(picked_id_source) >= 3 and len(picked_id_target) >= 3)
assert (len(picked_id_source) == len(picked_id_target))
corr = np.zeros((len(picked_id_source), 2))
corr[:, 0] = picked_id_source
corr[:, 1] = picked_id_target
# estimate rough transformation using correspondences
print("Compute a rough transform using the correspondences given by user")
p2p = o3d.registration.TransformationEstimationPointToPoint()
trans_init = p2p.compute_transformation(source, target,
o3d.utility.Vector2iVector(corr))
# point-to-point ICP for refinement
print("Perform point-to-point ICP refinement")
threshold = 0.03 # 3cm distance threshold
reg_p2p = o3d.registration.registration_icp(
source, target, threshold, trans_init,
o3d.registration.TransformationEstimationPointToPoint())
draw_registration_result(source, target, reg_p2p.transformation)
print("")
if __name__ == "__main__":
demo_crop_geometry()
demo_manual_registration()
这个脚本执行了用户交互的两个程序:demo_crop_geometry()和demo_manual_registration()。
裁剪几何体
def demo_crop_geometry():
print("Demo for manual geometry cropping")
print(
"1) Press 'Y' twice to align geometry with negative direction of y-axis"
)
print("2) Press 'K' to lock screen and to switch to selection mode")
print("3) Drag for rectangle selection,")
print(" or use ctrl + left click for polygon selection")
print("4) Press 'C' to get a selected geometry and to save it")
print("5) Press 'F' to switch to freeview mode")
pcd = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_0.pcd")
o3d.visualization.draw_geometries_with_editing([pcd])
这个函数简单读取了一个点云数据然后调用了draw_geometries_with_editing函数,该函数提供了顶点选择和裁剪功能。
Note
Open3d有一个继承Visualizer类的VisualizerWithEditing类。它提供了图形用户交互功能。同样的例子在自定义可视化中,VisualizerWithEditing()是可以显示的替换掉draw_geometries_with_editing([pcd]).
在几何体显示之后,按两次Y可以将几何体与Y轴的负半轴对齐。在调整好观看视角之后,按K键锁定视图并切换到选择模式。
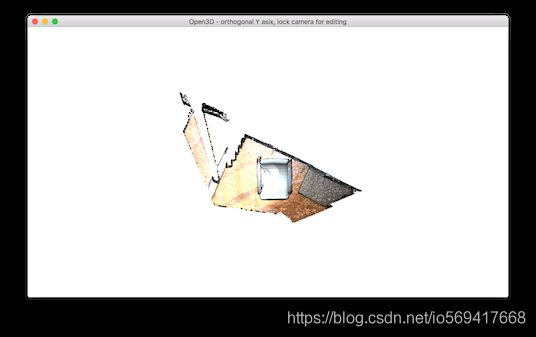
Tip
在实际的选取区域的操作中,一般都是使用正交投影模型(orthographic projection model.)将几何体与任意轴对齐。这个技巧可以避免由于透视投影带来自遮挡问题,使得选取变得容易。
在选择区域时,可以用鼠标拖动(矩形区域)或者 ctrl + 鼠标左键点击(选取多边形区域)。下面的例子展现了多边形选取。

注意选择的区域为深色阴影,如果要保存选取的区域并且丢弃其余的,请按C。他会弹出一个对话框去保存裁剪的区域。裁剪的结果将在显示之后保存。


按F可以结束选择模式进入自由浏览模式。

手动配准
选取对应点
下面的代码使用点对点的ICP去配准两个点云。它通过人工交互来获得初始的对齐。
def demo_manual_registration():
print("Demo for manual ICP")
source = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_0.pcd")
target = o3d.io.read_point_cloud("../../TestData/ICP/cloud_bin_2.pcd")
print("Visualization of two point clouds before manual alignment")
draw_registration_result(source, target, np.identity(4))
# pick points from two point clouds and builds correspondences
picked_id_source = pick_points(source)
picked_id_target = pick_points(target)
这个脚本读取两组点云,并且在对齐之前可视化。

def pick_points(pcd):
print("")
print(
"1) Please pick at least three correspondences using [shift + left click]"
)
print(" Press [shift + right click] to undo point picking")
print("2) Afther picking points, press q for close the window")
vis = o3d.visualization.VisualizerWithEditing()
vis.create_window()
vis.add_geometry(pcd)
vis.run() # user picks points
vis.destroy_window()
print("")
return vis.get_picked_points()
函数pick_points(pcd)创造了一个VisualizerWithEditing实例去模仿draw_geometries,他创造可视化窗口,添加几何图形,可视化几何图形和结束。VisualizerWithEditing提供一种新的交互函数get_picked_points(),他可以返回用户选取的顶点的索引。
在窗口中点击 shift + 左键可以选取顶点。当顶点被选取的时候,可视化窗口会在上面覆盖一个球形。比如,下图是在源点云上选取了三个顶点之后的结果。

将会打印出:
Picked point #58481 (2.14, 1.56, 1.53) to add in queue.
Picked point #77321 (2.86, 1.92, 1.09) to add in queue.
Picked point #42639 (3.28, 1.53, 1.45) to add in queue.
按 q 关闭窗口,之后在目标点云上选取相应的对应点。这个球体的颜色有助于识别相同的对应点。

将会打印出:
Picked point #54028 (1.62, 1.81, 1.23) to add in queue.
Picked point #97115 (2.45, 2.19, 1.11) to add in queue.
Picked point #47467 (2.75, 1.71, 1.45) to add in queue.
Tip
为了有一个好的配准结果,应该去选取场景中均匀分散的三个对应点。选取拐角区域的顶点有助于选取高质量的对应点。
使用用户选取的对应关系配准
assert (len(picked_id_source) >= 3 and len(picked_id_target) >= 3)
assert (len(picked_id_source) == len(picked_id_target))
corr = np.zeros((len(picked_id_source), 2))
corr[:, 0] = picked_id_source
corr[:, 1] = picked_id_target
# estimate rough transformation using correspondences
print("Compute a rough transform using the correspondences given by user")
p2p = o3d.registration.TransformationEstimationPointToPoint()
trans_init = p2p.compute_transformation(source, target,
o3d.utility.Vector2iVector(corr))
# point-to-point ICP for refinement
print("Perform point-to-point ICP refinement")
threshold = 0.03 # 3cm distance threshold
reg_p2p = o3d.registration.registration_icp(
source, target, threshold, trans_init,
o3d.registration.TransformationEstimationPointToPoint())
draw_registration_result(source, target, reg_p2p.transformation)
print("")
Demo的后续部分是根据用户提供的对应关系来计算初始化转换。这个脚本通过使用Vector2iVector(corr)建立了成对的对应关系。他利用TransformationEstimationPointToPoint.compute_transformation去计算一个初始化的变换。之后再此基础上使用registration_icp微调。
配准结果如下:

关于翻译大家有更好的意见欢迎评论一起学习!!!
欢迎大家加入知识星球一起学习。