运筹说 第90期 | 网络计划-图解评审法
前述章节的网络计划方法主要研究以时间为主要参数的确定型网络模型,其中的概率型网络模型也只讨论工作公式的不确定性,并没有对事项或工作的不确定性进行讨论。由于这类网络模型的建立有严格的规则,大量研究与开发类计划尚无法表达。因从本期就让小编带领大家学习图解评审法吧。

一、图解评审法简介
前述章节的网络计划方法主要研究以时间为主要参数的确定型网络模型,其中的概率型网络模型也只讨论工作公式的不确定性,并没有对事项或工作的不确定性进行讨论。由于这类网络模型的建立有严格的规则,大量研究与开发类计划尚无法表达。
因此提出GERT法:
- 随机网络,可有回路和多重边,终点不一定唯一
- 更多应用于研究和开发项目
知识引入:
例1:新产品研制问题
某工厂研制一种新产品的过程是研制、检测,经检测后,或成功(鉴定,概率为0.7),或失败(作废品处理,概率为0.1),或修改图纸,进一步研制(概率为0.2)。用确定型网络图表示上述过程,暂不考虑工作的工时,括号内为工作实现的概率。如图1所示。

问题特点:
(1)②→③→④→②回路。
(2)事项节点③后边的三个工作不是确定要进行的,而是按一定概率随机发生的,三个工作只能出现一个。
(3)有两个终点事项⑤、⑥,研制成功或失败都只能以一定的概率实现。
(4)整个研制工作经由哪几个工作到达哪个终点是随机的。这与网络图要求的规则相违背,网络图要求“不允许有回路”,“流人一个事项节点的工作必须在该节点实现以前完成”,“一个事项节点流出的工作必须开始且完成”,因此例4这类问题不能采取前述网络模型处理。
为解决这类不确定性的网络规划问题,1966年普列茨克(Pritsker)提出了图解评审法。下面介绍GERT方法的建模与求解。
随机网络(GERT网络)
随机网络为双代号网络,由节点和边组成,节点分为输人侧和输出侧。输入侧有3种逻辑关系,输出侧有两种逻辑关系,可得到6种不同的节点,如图2所示。
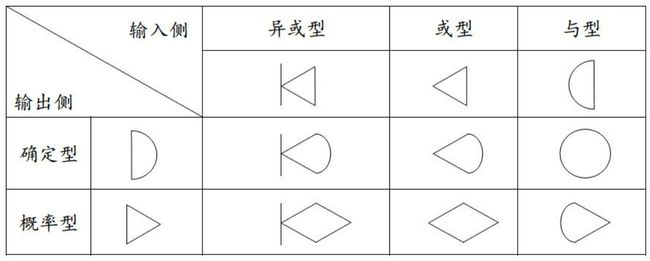
(1)输入侧
- 异或型:输入边为互斥型,即在规定时间内只能有一个边实现,该节点实现。
- 或型:输入该节点的任一边实现,该节点实现。实现的时间是各输人边中完成时间最短者。
- 与型:输入该节点的全部边均实现,该节点才能实现,实现的时间是各输入边中完成时间最长者。
(2)输出侧
- 确定型:该节点输出的边都必须实现(各边实现概率均为1)。
- 概率型:该节点输出的边只有一条实现(全部输出边之实现概率和为1)。
GERT网络中每条边表示工作,一般有两项参数(P,t):
- P为该工作实现的概率;
- t为工作工时,可以是常数或随机变量,若为随机变量,t表示均值。
例1的问题可以用图3表示。各边上括号内为(P,t)。

由上所述,可知前面各节介绍的确定型网络模型,其节点输人侧为与型,输出侧为确定型,工作实现概率为1,只是GERT网络模型的一个特例。
二、图解评审法的基本原理
由于随机网络所描述的问题,工作与事项的实现都具有随机性,所要解决的目标随之也有变化,不再是简单地计算计划的确定工期与关键路线。像例1的目标为求研制过程所需的平均工时及研制成功的概率。
为此,图解评审法解决问题的步骤为:
(1)进行系统分析,明确问题的目标,各工作间的关系,正确绘制GERT网络图。
(2)对工作工时及出现概率等参数进行认真测算与估计。如果工时是随机变量,需测辨其所服从的概率分布与密度函数,以及期望值和方差,作为计算的依据。
(3)对模型进行分析、计算,计算内容依系统目标决定。一般地说,不但要求解网络中所消耗的时间、费用和资源,而且还要求得网络中的流。
(4)对计算结果进行分析和评价,作出预测或决策指导或监控计划的实施。
三、图解评审法的基本解法
目前有两大类解法。
解析法:直接使用网络中的参数进行计算,把随机和概率问题化为确定问题求解。或采用信号流图理论,用等效函数法求解。
模拟法:在计算机上进行模拟实验,用反复进行随机抽样方法模拟各种概率及随机变量,进而通过统计模拟结果得到网络问题的解,
1.解析法
这里只介绍直观的手工计算的方法。
例2 生产一批零件,经过加工1完成后送检查1,检查1工作完成后,合格品转到加工2,不合格品转到返修工作进行修理加工,然后再送检查2,其中返修合格者转到加工2,不合格者报废。加工2完成后的产品转到检查3,其中合格品入库,不合格品报废。试求成批生产这种零件,每个成品平均需要的加工时间及成品率。图4描述了整个零件加工过程,表1给出了各工作完成概率、工时及各工作关系。
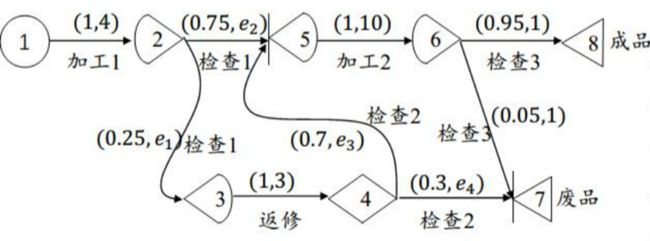

从对图4的分析可以看出,零件的生产过程可以是以下5条路线中的一条:
![]()
该条路线实现的概率为
![]()
所需要的时间为
![]()

该条路线实现的概率为
![]()
所需要的时间为
![]()

该条路线实现的概率为
![]()
所需要的时间为
![]()
![]()
该条路线实现的概率为
![]()
所需要的时间为
![]()

该条路线实现的概率为
![]()
所需要的时间为
![]()
其中零件加工为成品入库,则只能经过路线(a)或(b),所以成品率为
![]()
每个成品零件所需平均加工时间为

因此可以得出零件的废品率为

由本问题的计算过程可知解析法求解随机网络的基本思路和方法,但是当事项与工作增多时,计算量将大大增加,比较烦琐。一般可用信号流图理论中的等效函数,将GERT网络中的概率分支和随机变量问题用等效的手段,变换为确定的问题求解,这里不再介绍。
2.模拟法
基本步骤:
(1)加工路线均始于①,以概率Pi 转移到紧后工作,直到终点事项⑦或⑧。若Pi (0≤Pi≤1) 服从均匀分布,则可由随机数来模拟。根据可能出现的两个(或若干个)紧后工作概率值将[0,1]分为两个(或若干个)区间,产生的随机数落在哪个区间,就认为那个区间对应工作被实现。
(2)不同加工路线上,各工作所需时间若是服从某种分布的随机变量,其取值也可以通过抽取服从(0,1)均匀分布的随机数,用公式逆变或逐段逼近的方法来得到。
(3)通过步骤(1)(2)对某零件的加工路线与所需工时的模拟可得到随机网络的一个确定子网络。计算每个零件加工时间并记下路径。
(4)完成N次模拟(零件总数为N)后,可按照下述公式求出每个成品零件的平均加工时间及成品率


ti —第i个成品零件加工时间
tj 一第j个废品零件加工时间
k—成品零件个数
由上所述,GERT方法用随机网络来表示不确定性网络规划问题,综合运用网络理论、概率论、信号流图理论及计算机模拟技术来求解。目前GERT方法被应用于研究开发规划、存储分析、油井钻探、合同投标、人口动态、维修和可靠性研究、车辆交通网络、事故防范、计算机算法等方面,随着计算机发展及各种应用软件的完善,将有更广泛的应用前景。
信号流图理论
信号流图同样是以网络图形式表示所研究系统(或问题)中各变量之间的相互关系,是一种线性系统的建模和分析工具。起初用于配电网络的分析计算,以后逐步扩展到工程中其它线性系统,如随机网络中。在信号流图中,系统的元素用节点和箭头表示,节点代表一定的变量,箭头表示变量之间的关系,即节点之间的传递系数或传递函数。
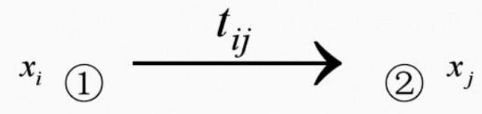
因此,变量xi,与xj,之间的关系为xj=tij×xi,。根据变量之间相乘关系,可推得信号流图最基本的节点定律:节点的值等于进入该节点的每条枝线的传递系数与相应枝线的节点值的乘积的总和,即,

从理论上说,把信号流图原理和矩母函数的特征结合起来就形成GERT网络解析算法的基础。接下来,介绍矩母函数概念及其特征。
矩母函数
令在网络图的节点集合中,仅含“异或”型节点,随机变量为工作集合中第(ij)个工作的周期。按节点逻辑,工作(ij)必须在节点i实现时才能执行。因此,要知道工作(ij)的执行情况,就需要知道在给定节点i实现的条件下,工作(ij)被执行的概率,以及的概率分布(离散变量)或概率密度函数(连续变量)。
在GERT网路模型中,设Pij为节点i至节点j的枝线实现的概率,完成该枝线所需要的时间概率密度为f(tij)或概率分布为P(tij),则随机变量tij的矩母函数定义为:

传递函数
定义:节点i至节点j的传递函数为Wij(S)=PijMij(S).
这样,对于每项工作都有两个参数Pij和tij的GERT网络,总可以用一个与原网络结构相同,且每项工作上总有个参数的Wij(S)的G网络来代替,如图7所示

运用信号流图原理,对具有Wij(S)函数的网络求解其等效WE(S)函数,再按矩母函数的特征,通过一定换算过程,得到网络的等价参数PE和TE,这个过程使信号流图原理与矩母函数在GERT网络中结合起来,提供了随机网络解析求解的方法。
梅森增益公式
用化简信号流图的方法求输入输出间的系统函数,最后得到总增益或总传输,但是这样费时又麻烦。而利用梅森增益公式可以对复杂的信号流图直接求出系统输出与输入之间的总增益,或传递函数,使用起来更为方便。
任意两个节点之间传递函数的梅森增益公式为:

熟悉了梅森公式以后,根据它求取系统的增益,比利用结构图更简便有效,特别是复杂的多环系统和多输入、多输出系统效果更著。
★求解步骤
综上所述,对仅含有“异或”型节点的 GERT网络的解析计算,可归纳以下步骤:
(1)根据实际系统或问题的基本特征,构造GERT网络模型;
(2)运用数理统计学方法得到网络中各项工作的基本参数,如各项工作的实现概率和实现时间(或费用)的概率分布等基本参数;
(3)应用信号流图的梅森公式,确定网络的特征传递函数WE(S)和等价概率 PE(S);
(4)求得项目实现概率。根据矩母函数的性质,有当 S=0 时,
ME(S)=ME(0)=1,则实现的概率为PE=WE(s)|s=0;
(5)根据矩母函数的 n 阶导数在 s=0 的值,即为随机变量的 n 阶原点矩。因此,特定节点实现时间(或费用)的期望值为:

方差为:

(6)根据投资项目风险的定义,风险的绝对度量为V(t)
相对度量,即风险度为
![]()
算例3:检修问题
某物流企业根据实际情况对其即将进行的自动化立体仓库检修作了一个GERT随机网络图,见图1,各检修程序的概率及时间分布见表,其中假设各检修程序完成的时间均服从正态分布。试讨论该自动化立体仓库的维修风险。


具体解析计算步骤如下:

由计算结果看出,节点9肯定会实现,这是合乎情理的,因为无论如何,该检修项目是必定会完成的。本次自动化立体仓库检修需22.1327天,离散程度,即风险为7.337天,风险度为33.15%,由此可见,该维修项目完成的时间变化范围较大。
由此可见,对于任意GERT网络,可以先对各项工作定义其W函数,并运用信号流图理论求得网络的等价传递函数WE(S),再利用矩母函数的基本性质,即可反演得到网络的所有参数。这体现了GERT解析法的基本思路。