yolov5 opencv dnn部署 github代码
yolov5 opencv dnn部署 github代码
-
-
- 源码地址
- 实现推理源码中作者的yolov5s.onnx
-
- 推理条件
- python部署(因为python比较简单就直接介绍了)
- c++部署
- 参考链接
-
源码地址
- yolov5官网还提供的dnn、tensorrt推理链接
- 本人使用的opencv c++ github代码,代码作者非本人,也是上面作者推荐的链接之一
实现推理源码中作者的yolov5s.onnx
推理条件
实现推理code中作者的yolov5s.onnx
windows 10
Visual Studio 2019
Nvidia GeForce GTX 1070
opencv 4.5.5、opencv4.7.0 (注意 4.7.0代码不适用,如果要使用opencv4.7.0来进行推理,可能会出现下面的问题图1 problem中的问题)(但是,如果添加了之后,4.7.0的推理速度会比4.5.5的速度慢了不少)
 图 1 p r o b l e m 图1 problem 图1problem
图 1 p r o b l e m 图1 problem 图1problem
解决方法 图 1 s o l v t i o n 图1 solvtion 图1solvtion
图 1 s o l v t i o n 图1 solvtion 图1solvtion
python部署(因为python比较简单就直接介绍了)
一、直接用VScode打开代码
二、然后在终端输入命令
python python/yolo.py

三、结果如下图所示
c++部署
当然不管是使用opencv dnn的cpu还是gpu都得创建相应的环境,这里先不做介绍,以后有时间再介绍。
一、使用VS2019创建一个新的项目,这里不做过多赘述
二、该项目搭建公共的opencv属性,或者使用已搭建好的公共的opencv455属性(以opencv455为例,添加其它的也是这样的,例如opencv455_cuda等)
这里如果使用公共的opencv455属性,只需要在新建的c++空项目中使用以下步骤即可添加
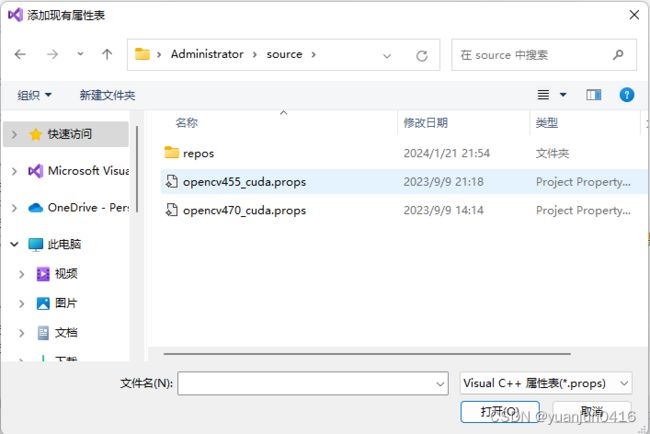
1、 “属性管理器”——>“鼠标右键点击Release|x64”——>“添加现有属性表(E)”

2、 选在对应的已创建好的属性表,然后点击“打开”
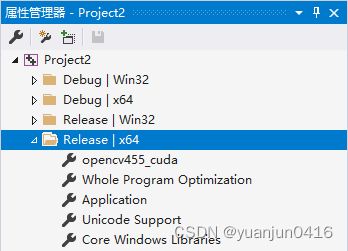
3、添加后的结果
三、将code中的下列文件复制到新建的项目中的repos/Project4/Project4中,如下图所示

四、将code中的cpp/yolo.cpp添加到新建项目的源文件中,添加过程和结果如下图所示

结果

五、使用x64进行Release,结果如下图所示
1、opencv4.5.5推理结果
2、opencv4.7.0推理结果
六、yolo.cpp的代码在这(本人应该没做改动吧,忘记了)
#include 参考链接
- 代码参考链接
- https://github.com/doleron/yolov5-opencv-cpp-python
- https://github.com/Hexmagic/ONNX-yolov5/tree/master
- https://github.com/yzy12-max/yolov5_deploy(这个是理论参考链接2中对应的仓库)
- 理论参考链接
- https://github.com/ultralytics/yolov5/issues/251
- https://blog.csdn.net/weixin_41311686/article/details/128421801(这个的是另外的代码推理解析部分,值得一看)