AI嵌入式K210项目(18)-卷积人工神经网络硬件加速器 KPU
文章目录
- 前言
- 一、K210的KPU
- 二、实验过程
- 总结
前言
K210内置了丰富的加速器,包括神经网络处理器 (KPU),AES(高级加密加速器),APU 麦克风阵列语音数据加速计算处理器,现场可编程 IO 阵列 (FPIOA),数字摄像头接口 (DVP),相对于软件可以极大的提高 AES 运算速度,快速傅里叶变换加速器 (FFT),安全散列算法加速器 (SHA256)。
本文介绍内置的卷积人工神经网络硬件加速器 KPU;
一、K210的KPU
KPU 是通用的神经网络处理器,它可以在低功耗的情况下实现卷积神经网络计算,实时获取被检测目
标的大小、坐标和种类,对人脸或者物体进行检测和分类。使用 kpu 时,必须结合 model compiler。
KPU 是通用神经网络处理器,内置卷积、批归一化、激活、池化运算单元,可以对人脸或物体进行实
时检测,具体特性如下:
• 支持主流训练框架按照特定限制规则训练出来的定点化模型
• 对网络层数无直接限制,支持每层卷积神经网络参数单独配置,包括输入输出通道数目、输入输
出行宽列高
• 支持两种卷积内核 1x1 和 3x3
• 支持任意形式的激活函数
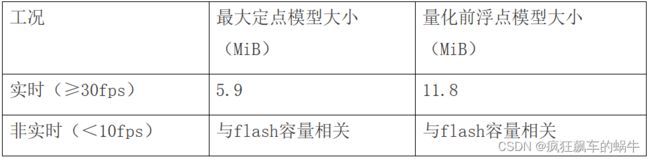
• 实时工作时最大支持神经网络参数大小为 5.5MiB 到 5.9MiB
• 非实时工作时最大支持网络参数大小为(Flash 容量-软件体积)
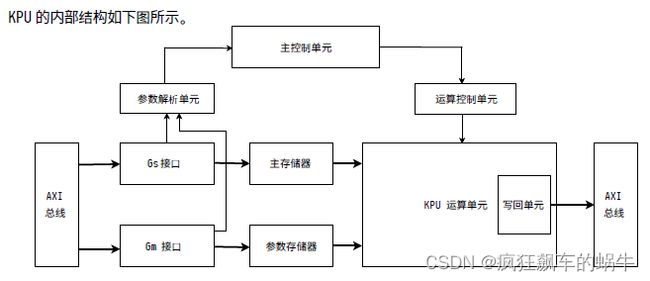
KPU 的内部结构如下图所示:
对应的头文件 kpu.h
为用户提供以下接口:
• kpu_task_init (0.6.0 以后不再支持,请使用kpu_single_task_init):初始化kpu 任务句柄,该函数具体实现在model compiler 生成的gencode_output.c 中。
• kpu_run (0.6.0 以后不再支持,请使用kpu_start):启动KPU,进行AI 运算。
• kpu_get_output_buf (0.6.0 以后不再支持):获取KPU 输出结果的缓存。
• kpu_release_output_buf (0.6.0 以后不再支持):释放KPU 输出结果缓存。
• kpu_start:启动KPU,进行AI 运算。
• kpu_single_task_init:初始化kpu 任务句柄。
• kpu_single_task_deinit:注销kpu 任务。
• kpu_model_load_from_buffer:解析kmodel 并初始化kpu 句柄。
• kpu_load_kmodel:加载kmodel,需要与nncase 配合使用。
• kpu_model_free:释放kpu 资源。
• kpu_get_output:获取KPU 最终处理的结果。
• kpu_run_kmodel:运行kmodel。
二、实验过程
本实验代码较多,这里只贴出main.c的内容,其余内容稍后上传到gitee上
#include 代码完成后,进行编译
cd build
cmake .. -DPROJ=kpu -G "MinGW Makefiles"
make
编译完成后,在build文件夹下会生成kpu.bin文件。
使用type-C数据线连接电脑与K210开发板,打开kflash,选择对应的设备,再将程序固件烧录到K210开发板上。

实验结果:烧录固件完成后,系统会自动弹出一个终端窗口,并且打印一些初始化的信息,此时我们看显示器的已经显示了摄像头当前采集的画面,而且左上角还有一个‘origin’的单词,当我们按下keypad中间的键时,模式切换,LCD显示的画面会变化,除了原始画面,还有其他三种模式可以显示,每按一次keypad都可以切换一次模式。

总结
K210芯片内置了卷积人工神经网络硬件加速器KPU,它可以在低功耗的情况下实现卷积神经网络计算,实时获取被检测目
标的大小、坐标和种类,对人脸或者物体进行检测和分类;