【论文笔记】Learning Deconvolution Network for Semantic Segmentation
重要说明:严格来说,论文所指的反卷积并不是真正的 deconvolution network 。 关于 deconvolution network 的详细介绍,请参考另一篇博客:什么是Deconvolutional Network?
一、参考资料
Learning Deconvolution Network for Semantic Segmentation
二、Deconvolution Network
deconvolution network是卷积网络(convolution network) 的镜像,由反卷积层(deconvolutional layers)和上采样层(Unpooling layers)组成。本质上,deconvolutional layers是由卷积层(convolutional layers)组成的。
deconvolution network=deconvolutional layers+Unpooling layers
1. 引言
原始的FCN存在以下问题:
- 第一,感受野为固定大小;物体大于或小于感受野会被
fragmented or mislabeled。大物体分割不连续,小物体被忽视。虽然FCN加入了skip architecturer,但是这并不是根本的解决方案,问题在于没有详细的边界和语义; - 第二,输入反卷积层的
label map太粗糙,反卷积过程太简单,使得物体的细节信息丢失或被平滑;在FCN论文中,label map大小仅仅为16x16,以deconvolution作为双线性差值来获得原始输入图像大小的分割。由于缺少深度的反卷积网络,很难精确重建物体边界这种高度非线性结构。
2. 论文创新点
为了克服FCN存在的问题,论文用了一个完全不同的策略进行语义分割,主要贡献如下:
- 学习一个多层的
deconvolution network,它由deconvolutional layers,Unpooling layers和ReLU layers组成。 - 将训练好的网络应用在目标候选区域(object proposal),来获得
instance-wise segmentions。再将这些单个的分割结果结合起来组成最终的语义分割结果。这解决了FCN存在的物体尺度问题,能够识别细小的结构。
3. Deconvolution Network与FCN对比
本文与FCN最大的不同,应该是上采样阶段的不同,FCN的上采样利用转置卷积(Conv2DTranspose),本文利用deconvolution network,也就是Unpooling layers+deconvolutional layers。可以简单理解,基于 Conv2DTranspose 的上采样和基于 Unpooling layers+deconvolutional layers 的上采样,都可以实现语义分割任务。
通过 deconvolutional layers 和 Unpooling layers 的结合,论文可以产生更精细的分割图。和FCN的对比如下图:

4. Deconvolution Network网络结构
论文提出的网络结构由卷积网络层和反卷积网络层组成。卷积网络层对应于特征提取器,将输入图像转换为多维特征表示;而反卷积网络是一个形状(shape)生成器,对卷积网络层中提取的特征进行对象分割。网络的最终输出是一个与输入图像尺寸相同的概率图,表示每个像素点属于预定义类别的概率。
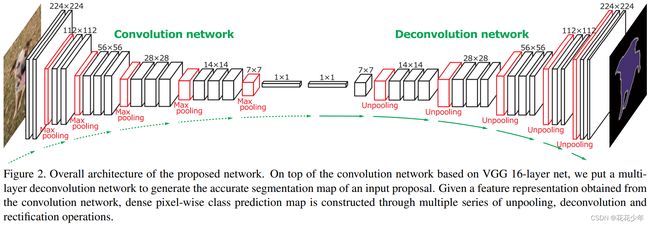
-
卷积网络(convolution network): VGG-16(去除分类层),包括:
convolutional layers,Relu layers,pooling layers。 -
反卷积网络(deconvolution network):反卷积网络是卷积网络的镜像,包括一系列的
Unpooling layers,deconvolutional layers,Relu layers。反卷积网络输出密集的逐像素类别概率图(dense
pixel-wise class probability map)。
4.1 Unpooling layers
Unpooling layers 是通过回溯原始位置来获得更好的结构。
首先,在执行pooling操作时用 switch variables 记录 max pooling 选择最大值的位置(location)。然后,在 unpooling 阶段,利用 switch variables 还原位置,恢复 pooling 之前的尺寸大小,其它像素位置用零元素填充,得到稀疏的激活图(sparse avtivation map)。
4.2 deconvolution layers
对稀疏激活图进行deconvolution操作,使得稀疏激活图变成稠密激活图。执行deconvolution后,裁剪(crop)激活图的边界,使其等于 Unpooling layers 的输出尺寸(也是 deconvolutional layers 输入的大小)。
论文中,低层的 deconvolutional layers 可获得目标的粗略信息(例如:位置,形状,范围),而高层的 deconvolutional layers 可获得更精细的信息。
5. Deconvolution Network可视化
可视化 Deconvolution network 的每一层,如下图所示:
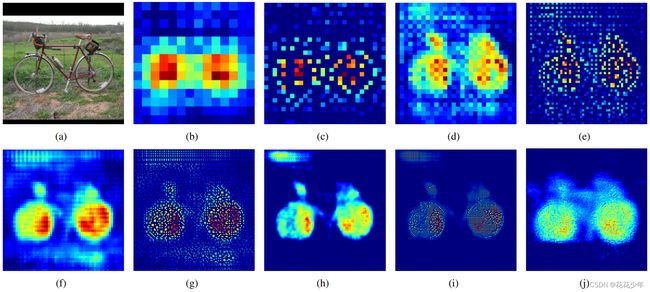
图(a)是输入层;图(b)是14x14 deconvolution layers 的结果;图©是28x28的 Unpooling layers 的结果;图(d)是28x28 deconvolution layers 的结果;图(e)是56x56 Unpooling layers 的结果;图(f)是56x56 deconvolution layers 的结果;图(g)是112x112 的Unpooling layers 的结果;图(h)是112x112 deconvolution layers 的结果;图(i)和图(j)分别是224x224 Unpooling layers 和 deconvolution layers 的结果。
6. 总结
论文将 semantic segmentation 问题视为 instance-wise segmentation 问题,也就是 pixel-wise prediction。网络是以包含目标的子图像(将它视作一个instance)作为输入,并以此来产生 逐像素的类别预测结果(pixel-wise class prediction)。最后将图像中每个候选区域的输出整合起来,得到原始图像的输出。
instance-wise segmentation VS image-level prediction:
instance-wise segmentation:能处理不同尺度大小的物体,识别细节信息;减少搜索空间,减少训练的复杂度,减少存储需求;image-level prediction:固定大小感受野,不能解决上述问题。
三、参考文献
[1] Noh H, Hong S, Han B. Learning deconvolution network for semantic segmentation[C]//Proceedings of the IEEE international conference on computer vision. 2015: 1520-1528.