ROS学习笔记(一)——ROS Melodic的安装
目录
文章目录
声明
前言
安装步骤
(1)添加镜像源
(2)添加密钥
(3)更新软件信息
(4)安装
(5)初始化rosdep(注意,这里十有八九会出错!!!)
第一条指令
第二条指令
(6)设置环境变量:
(7)安装rosinstall
总结
参考文章
授权说明
声明
本文为小陈同学原创,本人是刚刚开始学习ROS的小白,在安装过程中遇到了很多坑,特此总结整个安装过程与踩过的坑,希望能够对您有所帮助,转载请阅读文末的“授权说明”,学习笔记为连载,更新频率为一周一更,欢迎转载、关注、点赞 !
前言
ROS于2007年斯坦福大学的STAIR项目,经过十余年的发展,ROS逐渐风靡全球,成为机器人界不可或缺的操作系统。在这个操作系统上,你可以方便地获取、改写、编译自己代码中所需要的工具与函数。关于具体操作,可以关注后续文章。
本文安装的Ubuntu版本为18.04,ROS版本为2018年发行的长期版本ROS Melodic。
安装步骤
PS:以下每个步骤进行前都带有说明,如不需要了解可以直接跳过蓝色字体部分看代码部分即可。
(1)添加镜像源
PS:镜像是一种文件的存储形式,源即来源。镜像源一般指的是过呢存放外国软件镜像的网站。由于需要用到国外的一些如Python、Ubuntu之类的国外开源软件、系统,镜像源提供了从国内下载国外开源软件、系统的途径。
常用的有:清华源、阿里源、腾讯源等。
清华源:https://mirrors.tuna.tsinghua.edu.cn/
阿里源:https://developer.aliyun.com/mirror/
腾讯源:https://mirrors.cloud.tencent.com/
这里笔者选择的是清华源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
(2)添加密钥
PS:密钥是保证产品能够正常使用的“钥匙”。
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(3)更新软件信息
PS:更新是为了保持从源获取的软件信息是最新的。
sudo apt update
(4)安装
PS:此处推荐桌面完整版,后续使用功能比较完整,此处需要比较长的时间安装,本人用了30min。
sudo apt install ros-melodic-desktop-full
(5)初始化rosdep(注意,这里十有八九会出错!!!)
PS:目的是为了把/etc/ros/rosdep/source.list.d文件中的内容从那个网站核实一下。
包括两条指令:
第一条指令
运行以下代码
sudo rosdep init此处可能会因为没有安装 rosdep 指令会报错:sudo: rosdep : command not found 。
此时可运行安装命令:
sudo apt install python-rosdep2
若这一步运行成功,可运行一次以下命令即可:
sudo rosdep init笔者这一步没有成功,出现了以下错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.这是由于系统指定的获取路径不一致,以下方法是修改对应文件所指向的地址:
(本处理方法学自参考文章:https://blog.csdn.net/hxj0323/article/details/121215992)
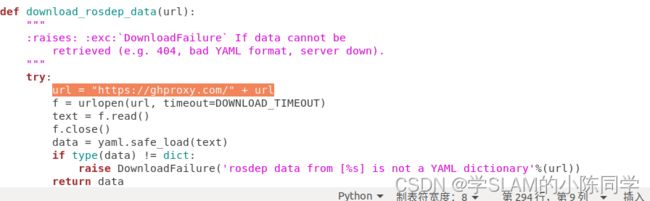
1. 运行以下代码,在293行后面添加:url = "https://ghproxy.com/" + url 并按上方按键保存。
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
编辑后如下图所示:
- 2. 打开对应文档,在
https://raw.githubusercontent......... 前加入https://ghproxy.com/
运行以下代码,授权打开并修改文件:
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
修改后如下图所示:

需要打开修改的文件还有以下四个:
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py需要修改处分别为:第35行、第69行、39行、第68与119行。
- 3. 运行以下代码
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
并在第205行后添加以下代码:
gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url修改后结果如下所示:

- 4. 再次运行以下代码即可:
sudo rosdep init第二条指令
运行以下代码
rosdep update这里也是一个笔者出错的点,出现了如下语句:
unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml]这个问题是由于IP地址有误引起的,修改方式如下:
- 1. 登录IP查询网:ipaddress.com
- 2. 运行以下代码,打开hosts文件:
sudo gedit /etc/hosts - 3. 查询IP,将其中一个添加于hosts文件后方:
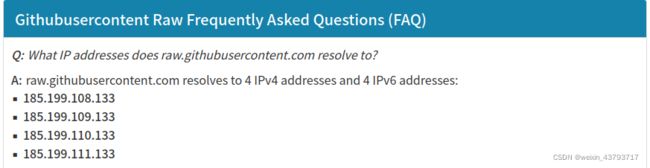
修改结果如下图所示:

- 4. 修改后再次运行以下代码即可:
rosdep update
(6)设置环境变量:
PS: 这一步一般不会出问题
运行以下代码即可:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
(7)安装rosinstall
PS:这是最后一步,一般也不会出问题
运行以下代码即可:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
总结
至此,所有步骤都已完成,恭喜你安装成功!
本人只是将自己收集到的方法应用于实践,总结了思路后写了这篇总结,感谢CSDN的大佬们,初入ROS,请多多包含。
如果有安装时遇到的问题,欢迎留言区交流,我不一定会,但是我会努力解决!
参考文章
- 解决ROS系统 rosdep update超时问题的新方法
- ROS Melodic 安装必成功流程+闭坑指南(超详细)
授权说明
- 原创文章在发布三天内禁止转载;
- 转载本人文章禁止声明原创;
- 转载必须标明作者与来源,本人保留追诉权利;
- 若非直接转载而是改变排版后转载,请联系本人,获得本人同意后即可转载。