C语言进阶之数据存储
一、数据类型
基本的内置类型:
char //字符数据类型 1字节
short //短整型 2字节
int //整形 4字节
long //长整型 4/8字节
long long //更长的整形 8字节
float //单精度浮点数 4字节
double //双精度浮点数 8字节1)类型基本归类
整型家族
//字符存储的时候,存储的是ASCII码值,是整型,所以归类的时候放在整型家族
char
unsigned char //无符号
signed char //有符号位,默认
short
unsigned short[int]
signed short[int]
int
unsigned int
signed int
long
unsigned long[int]
signed long[int]浮点数家族
float
double构造类型(自定义类型)
> 数组类型
> 结构体类型 struct
> 枚举类型 enum
> 联合类型 union
指针类型
int *pi;
char *pc;
float* pf;
void* pv;空类型
void 表示空类型(无类型)
通常应用于函数的返回类型、函数的参数、指针类型。
二、整型在内存中的存储
一个变量的创建是要在内存中开辟空间的。空间的大小是根据不同的类型而决定的。
1)原码、反码、补码
计算机中的整数有三种2进制表示方法,即原码、反码和补码。
三种表示方法均有符号位和数值位两部分,符号位都是用0表示“正”,用1表示“负”,而数值位
正数的原、反、补码都相同。
负整数的三种表示方法各不相同。
原码
直接将数值按照正负数的形式翻译成二进制就可以得到原码。
反码
将原码的符号位不变,其他位依次按位取反就可以得到反码。
补码
反码+1就得到补码。
在内存中存储的是补码,而且是倒着存储的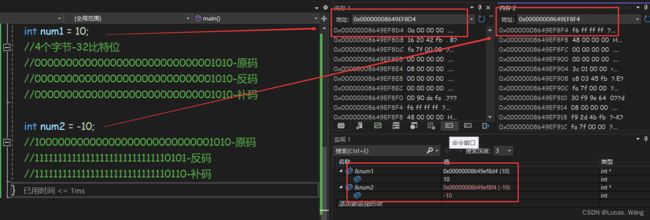
在计算机系统中,数值一律用补码来表示和存储。原因在于,使用补码,可以将符号位和数值域统一处理;
同时,加法和减法也可以统一处理(CPU只有加法器)此外,补码与原码相互转换,其运算过程是相同的,不需要额外的硬件电路。
2)大小端
什么是大端小端
大端(存储)模式,是指数据的低位保存在内存的高地址中,而数据的高位,保存在内存的低地址中;
小端(存储)模式,是指数据的低位保存在内存的低地址中,而数据的高位,,保存在内存的高地址中。
0x11223344
低地址 高地址
11 22 33 44 - 大端存储
44 33 22 11 - 小端存储为什么有大端和小端
为什么会有大小端模式之分呢?这是因为在计算机系统中,我们是以字节为单位的,每个地址单元都对应着一个字节,一个字节为8 bit。但是在C语言中除了8 bit的char之外,还有16 bit的short型,32 bit的long型(要看具体的编译器),另外,对于位数大于8位的处理器,例如16位或者32位的处理器,由于寄存器宽度大于一个字节,那么必然存在着一个如何将多个字节安排的问题。因此就导致了大端存储模式和小端存储模式。
例如:一个 16bit 的 short 型 x ,在内存中的地址为 0x0010 , x 的值为0x1122 ,那么0x11 为高字节, 0x22 为低字节。对于大端模式,就将 0x11放在低地址中,即0x0010中, 0x22 放在高地址中,即0x0011中。小端模式,刚好相反。我们常用的 X86 结构是小端模式,而 KEIL C51则为大端模式。很多的ARM,DSP都为小端模式。有些ARM处理器还可以由硬件来选择是大端模式还是小端模式。
//判断大小端
#include
int check_sys(){
int i = 1;
return (*(char*)&i);
}
int main(){
int ret = check_sys();
if (ret == 1){
printf("小端\n");
}
else{
printf("大端\n");
}
return 0;
} 
int main(){
char a[1000];
int i;
for (i = 0; i < 1000; i++){//内存中存放的是-1,-2,-3……-128,127,126……2,1,0,-1,-2,-3……-128,127,126……2,1,0
a[i] = -1 - i;
}//strlen统计\0之前的字符个数,\0的ASCII码值是0,所以打印结果为255
printf("%d", strlen(a));
return 0;
}三、浮点型在内存中的存储
常见的浮点数:
3.14159
1E10
浮点数家族包括: float、double、long double 类型。
浮点数表示的范围:float.h中定义
1)浮点数存储规则
根据国际标准IEEE(电气和电子工程协会) 754,任意一个二进制浮点数V可以表示成下面的形式:
(-1)^S * M * 2^E
(-1)^S表示符号位,当S=0,V为正数;当S=1,V为负数
M表示有效数字,大于等于1,小于2
2^E表示指数位
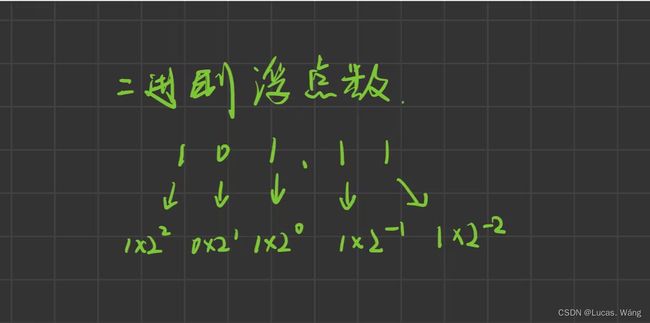
十进制的5.0,写成二进制是 101.0 ,相当于 1.01×2^2 。
那么,按照上面V的格式,可以得出S=0,M=1.01,E=2。
十进制的-5.0,写成二进制是 -101.0 ,相当于 -1.01×2^2 。那么,S=1,M=1.01,E=2。
IEEE 754规定:
对于32位的浮点数,最高的1位是符号位S,接着的8位是指数E,剩下的23位为有效数字M

对于64位的浮点数,最高的1位是符号位S,接着的11位是指数E,剩下的52位为有效数字M。

IEEE 754对有效数字M和指数E,还有一些特别规定。
2)M的规定
前面说过, 1≤M<2 ,也就是说,M可以写成 1.xxxxxx 的形式,其中xxxxxx表示小数部分。
IEEE 754规定,在计算机内部保存M时,默认这个数的第一位总是1,因此可以被舍去,只保存后面的 xxxxxx部分。比如保存1.01的时 候,只保存01,等到读取的时候,再把第一位的1加上去。这样做的目的,是节省1位有效数字。以32位 浮点数为例,留给M只有23位,将第一位的1舍去以后,等于可以保存24位有效数字。
3)E的规定
至于指数E,情况就比较复杂。
首先,E为一个无符号整数(unsigned int)
这意味着,如果E为8位,它的取值范围为0~255;如果E为11位,它的取值范围为0~2047。但是,我们 知道,科学计数法中的E是可以出 现负数的,所以IEEE 754规定,存入内存时E的真实值必须再加上一个中间数,对于8位的E,这个中间数 是127;对于11位的E,这个中间 数是1023。比如,2^10的E是10,所以保存成32位浮点数时,必须保存成10+127=137,即 10001001。
0.5 --> (-1)^0*1.0*2^-1
S=0
M=1.0
E=-1 +127=126,E实际存入的是126
然后,指数E从内存中取出还可以再分成三种情况:
E不全为0或不全为1
这时,浮点数就采用下面的规则表示,即指数E的计算值减去127(或1023),得到真实值,再将 有效数字M前加上第一位的1。
比如:
0.5(1/2)的二进制形式为0.1,由于规定正数部分必须为1,即将小数点右移1位,则为 1.0*2^(-1),其阶码为-1+127=126,表示为 01111110,而尾数1.0去掉整数部分为0,补齐0到23位00000000000000000000000,则其二进 制表示形式为:
0 01111110 00000000000000000000000
E全为0
这时,浮点数的指数E等于1-127(或者1-1023)即为真实值,
有效数字M不再加上第一位的1,而是还原为0.xxxxxx的小数。这样做是为了表示±0,以及接近于0的很小的数字。
E全为1
这时,如果有效数字M全为0,表示±无穷大(正负取决于符号位s)
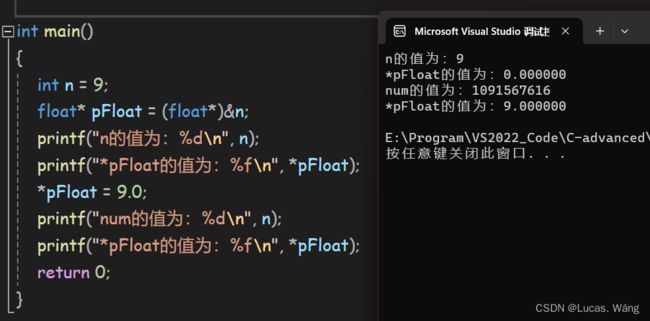
int n = 9;
//0 00000000 00000000000000000001001
//S E M
//0 -126 0.00000000000000000001001
//(-1)^0 * 0.00000000000000000001001 * 2^-126
//E在内存中都为0,E=1-127