linux:信号
文章目录
-
- 1、信号的实现机制
- 2、发送信号
-
- 2.1、发送信号的原因
- 2.2、发送信号的机制
-
- kill 函数
- 3、接收信号
-
- 3.1、处理信号
-
- signal 函数
- sigaction 函数
- 3.2、信号阻塞 | 解除
-
- sigset_t 信号集合
- sigpending 函数
- sigprocmask 函数
- sigsuspend 函数
- 4、定时器
-
- 4.1、睡眠函数
-
- sleep 函数
- pause 函数
- alarm 函数
- 4.2、定时器
-
- setitimer 函数
- 5、例:四窗口聊天
信号:消息,通知进程系统中发生了某种类型的事件,每种类型的信号对应某种系统事件。
信号是进程间通信中唯一的异步通信机制。在进程运行过程中,经常会产生一些事件,这些事件的产生和进程的执行往往是异步的,信号提供了一种在软件层面上的异步处理事件的机制。在硬件层面上的异步处理机制是中断,信号是中断的软件模拟。
每个信号用一个整型常量宏表示,以 SIG开头,在头文件
# 查看信号列表
kill -l
man 7 signal
1、信号的实现机制
发送信号到目的进程是由发送信号和接收信号两个步骤组成。
- 发送信号:内核通过更新目的进程上下文中的某个状态,发送一个信号给目的进程。
- 接收信号:目的进程被内核强迫以某种方式对信号的发送做出反应。
待处理信号(pending signal):一个发出而没有接收的信号,又称为挂起信号或未决信号。
在任何时候,一种类型的信号至多只会有一个待处理信号。也就是说,如果一个进程有一个类型为 k 的待处理信号,那么任何接下来发送到这个进程的类型为 k 的信号都不会排队等待,它们只是被简单丢弃。一个进程可以选择性地阻塞接收某种信号,当一种信号被阻塞,它仍可以被发送,但是产生的待处理信号不会被接收,直到进程取消对这种信号的阻塞。
一个待处理信号最多只能被接收一次。内核为每个进程,在位图 pending 中维护着待处理信号的结合,在位图 blocked 集合(信号屏蔽字)中维护着被阻塞的信号集合。只要发送了一个类型为 k 的信号,内核就会设置 pending中的第 k 位,只要接收了一个类型为 k 的信号,内核就会清楚 pending中的第 k 位。
2、发送信号
2.1、发送信号的原因
- 内核检测到系统事件,例除零错误等
- 进程调用 kill 函数
2.2、发送信号的机制
unix 系统提供了大量向进程发送信号的机制,这些机制都是基于进程组的。每个进程拥有自己的 pid,每个进程属于一个进程组 pgid。
硬件来源:键盘。硬件触发中断,操作系统切换到内核态执行中断处理程序,中断处理程序发送信号,进程接收信号并处理。
ctrl + c: SIGINT,表示终止该进程
ctrl + z: SIGTSTP,表示挂起该进程
软件来源:/bin/kill 程序,kill 函数,定时器函数。
kill 函数
进程通过 kill 函数发送信号给其他进程(包括自己)。
/*
返回值:成功返回 0,失败返回 -1
参数
- pid: pid > 0,发送 sig 信号给进程 pid
pid = 0, 发送 sig 信号给调用进程所在进程组中的每个进程(包括调用进程自己)
pid < 0,发送 sig 信号给进程组 |pid| 中的每个进程
- sig: 信号类型
*/
int kill(pid_t pid, int sig);
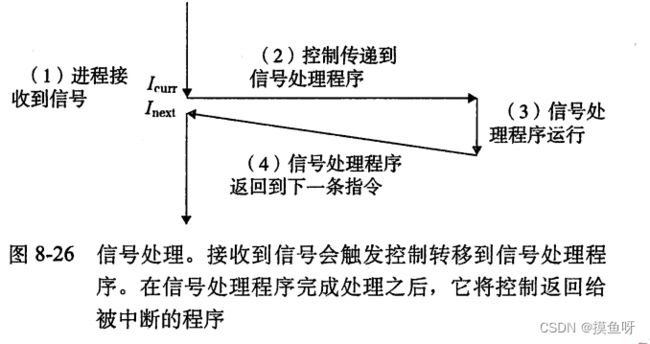
3、接收信号
进程接收到信号,有三种处理方法:
-
默认处理:
signal(SIGINT,SIG_DFL)- Term:终止当前进程 - Ign:忽略该信号 - Core:终止当前进程,并且产生core dump - Stop:停止(挂起)一个进程 - Cont:使当前停止的进程,继续运行 -
忽略信号:
signal(SIGSEGV,SIG_IGN) -
捕捉信号:自定义信号处理函数。用户自定义信号处理函数的目的就是实现进程的有序退出。
自定义信号处理函数设置原则
- 程序尽可能简单。例:处理程序简单设置全局标志并返回,所有与接收信号相关的处理由主程序执行。
- 函数内部只调用信号异步安全函数
安全函数:可重入的(例只访问局部变量),不能被信号处理程序中断。
3.1、处理信号
signal 函数
进程可以通过signal函数修改和信号相关联的默认行为。注意:SIGKILL 和 SIGSTOP这两个信号既不能被忽略也不能被捕捉,即进程接收到这两个信号后,只能接受系统的默认处理,即终止进程。
# include sigaction 函数
signal函数处理机制在多信号处理的场景下
- 收到不同类型的信号:中断当前信号处理,优先处理新的信号,处理完后返回继续处理当前信号。
- 收到相同类型的信号:执行完当前信号处理,然后只执行新的相同信号一次,重复的信号被忽略。
- 当前进程阻塞在系统调用上,收到一个信号后,中断系统调用,执行信号处理函数。
不同的系统有不同的信号处理语义,但 signal函数的处理过程是固定的,无法调整。因此,Posix 标准定义了sigaction函数,允许用户自定义这些场景下进程的行为。
/*
返回值:成功返回0,失败返回-1。
参数:
- signum:要捕捉的信号值
- act:自定义行为
- oldact:保存原来信号的回调函数,通常传入空指针
*/
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact)
其中 sigaction 结构体
struct sigaction {
// 联合体,新旧处理函数只有一个可以生效
union {
// 旧类型的信号处理函数
__sighandler_t _sa_handler;
// 新类型的信号处理函数,siginfo_t 保存信号的相关信息
void (*_sa_sigaction)(int, struct siginfo *, void *);
} _u;
// 阻塞信号的结合
sigset_t sa_mask;
// 信号处理的方式,旧类型填 0。其他例如:
// SA_SIGINFO,选择回调函数 sa_sigaction;
unsigned long sa_flags;
// 保留不用
void (*sa_restorer)(void);
};
3.2、信号阻塞 | 解除
Linux 提供阻塞信号的机制
- 隐式阻塞机制:内核默认阻塞任何当前处理程序正在处理信号类型的待处理信号。
- 显式阻塞机制: sigprocmask 函数
sigset_t 信号集合
#include sigpending 函数
获取当前待处理信号的集合。通常在回调函数当中使用的,用于检查当前是否阻塞了某个信号
/*
返回值:成功返回0,失败返回-1
参数 set: 要检测的信号
*/
int sigpending(sigset_t *set);
sigprocmask 函数
改变当前阻塞的信号集合(位图 blocked)
/*
返回值:成功返回0, 失败返回-1
参数
- how:
SIG_BLOCK: 把集合 set 中的信号加入到阻塞集合 blocked 当中 (blocked |= set)
SIG_UNBLOCK: 把集合 set 从阻塞集合 blocked 中删除 (blocked = blocked & ~set)
SIG_SETMASK: 把集合 set 替换阻塞集合 blocked (blocked = set)
- set:阻塞集合
- 参数3:原有的集合
*/
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);
sigsuspend 函数
使用 sigprocmask 函数可以实现信号保护临界区。在临界区执行代码的时候,此时产生的信号将会被阻塞,临界区结束的位置只需要再使用 sigprocmask 即可。pause 系统调用可以唤醒一个阻塞进程,直到被一个信号唤醒。若采用 pause 函数捕捉临界区的信号,信号解除阻塞后,立即执行信号处理函数,无法捕捉信号。
为了捕捉临界区的信号,将解除阻塞和等待信号合并成一个原子操作,就是sigsuspend函数
int sigsuspend(const sigset_t *mask);
4、定时器
4.1、睡眠函数
sleep 函数
#include pause 函数
阻塞一个进程,直到某个信号被递送时,进程会解除阻塞,然后终止进程或者执行信号处理函数
int pause(void);
alarm 函数
进程调用 alarm 函数向它自己发送 SIGALRM信号。
/*
返回值:前一次闹钟剩余的秒数,若以前没有设定闹钟,则为 0
参数:seconds: 闹钟的时间间隔
*/
unsigned int alarm(unsigned int seconds);
alarm 函数安排内核在 secs 秒后发送一个 SIGALRM 信号给调用进程。在任何情况下,对 alarm 的调用都将取消任何待处理的闹钟,并且返回待处理的闹钟在被发送前还剩下的秒数,若没有代理处理的闹钟,返回 0。
4.2、定时器
setitimer 函数
setitimer 系统调用负责调整间隔定时器。间隔定时器在创建的时候,就会设置一个时间间隔,定时器到达时间间隔时,调用进程会产生一个信号,随后定时器被重置。
定时器的分类
- 真实计时器:程序实际运行的时间(时钟时间),时间到发送
SIGALARM信号 - 虚拟计时器:程序在用户态模式下的 CPU 时间,时间到发送
SIGVTALARM信号, - 实用计时器:程序在用户态和内核态所占用的 CPU 时间,时间到发送
SIGPROF信号
使用 fork 的时候子进程不会继承父进程的定时器,使用 exec 时候,定时器不会销毁。
/*
返回值:成功返回0,失败返回-1.
参数:
- which:设置定时器的种类:真实计时器 SIGALARM、虚拟计时器 SIGVTALARM、实用计时器 SIGPROF
- new_value:定时器的初始时间
- old_value: 定时器的间隔时间
*/
int getitimer(int which, struct itimerval *curr_value)
int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value)
struct itimerval {
struct timeval it_interval; // 时间间隔
struct timeval it_value; // 初始时间
};
struct timeval {
time_t tv_sec; // 秒
suseconds_t tv_usec; // 微秒
};
例:使用真实计时器,实用计时器,统计程序执行时间,在实用计时器及虚拟计时器设定计时后,先睡眠,再让程序处于while(1)
#include 5、例:四窗口聊天
在四个终端上分别启动A、A1、B、B1四个进程。
- A 和 B 负责通信,A1和B1负责显示信息。
- A 和 B 使用有名管道进行通信
- A 和 A1 进程通信采用共享内存(信号量同步),B 和 B1 进程通信采用消息队列
- 退出方式:
ctrl + c和kill命令,任意进程收到信号后,给所有进程发送 10 号信号,有序退出。有序退出要做的主要有:关闭管道,解除对共享内存的映射,删除共享内存,删除信号量,删除消息队列。
showA
#include write A
#include showB
#include wirteB
#include