三维重建开源函数库或者工具
三维重建使用摄影测量、计算机视觉技术,利用立体视觉恢复真实相机姿态,获取现实物体的三维信息,并进行虚拟三维场景重现。
1、OpenDroneMap
ODM是一个基于航空影像的三维重建集成工具箱,利用多幅航空影像恢复相机姿态和3D场景,可以生产点云、三维贴图模型、正射影像、数字表面模型、数字高程模型等,提供Web接口,支持CUDA加速,基础函数库使用OpenSfM,OpenMVS,PDAL,Entwine,MVS Texturing,GRASS GIS,GDAL,PoissonRecon等。

源码:https://github.com/OpenDroneMap/ODM
https://github.com/OpenDroneMap/WebODM
文档:Welcome to OpenDroneMap’s documentation — OpenDroneMap 2.8.0 documentation
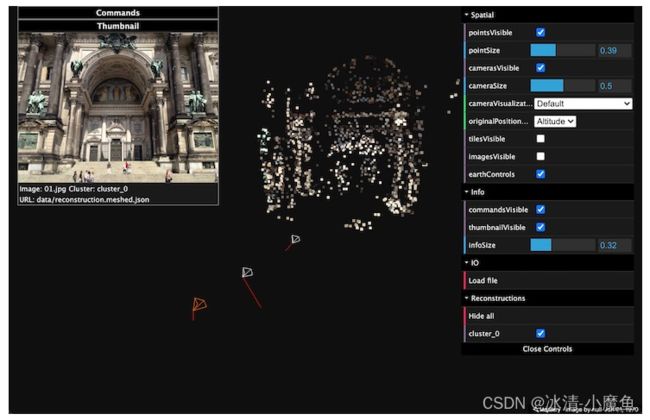
2、OpenSfM
OpenSfM是一个基于摄影测量的计算机视觉库,使用多视图像重建相机姿态和3D场景,集成地理测量的传感器(如GPS/GCP地面控制点),提供JavaScript查看器预览模型。基础函数库使用OpenCV,OpenMVS、Ceres Solver等。
源码:GitHub - mapillary/OpenSfM: Open source Structure-from-Motion pipeline
文档:OpenSfM — OpenSfM 0.5.2 documentation
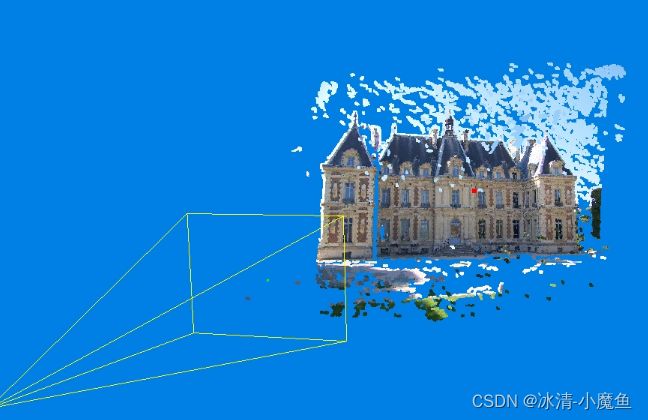
3、openMVS
OpenMVS也是一个基于运动目标检测的三维重建库。利用多视图立体视觉恢复相机姿态、稀疏点云,提供一整套摄影测量算法重建三维场景,支持点云构建、网格构建和网格着色,基础库使用Eigen,OpenCV,Ceres,CGAL,VCG,GLFW等。
源码:https://github.com/cdcseacave/openMVS/
文档:Home · cdcseacave/openMVS Wiki · GitHub
4、AliceVision
AliceVision是一个摄影测量的计算机视觉库,提供三维重建和相机跟踪算法。支持CUDA加速,基础库使用OpenImageIO、Geogram、OpenCV,OpenGV,OpenMP,PopSift,OpenMesh、MeshSDFilter、ceres-solver、OpenEXR、vector graphics等 。

源码:GitHub - alicevision/AliceVision: Photogrammetric Computer Vision Framework
文档:AliceVision | Photogrammetric Computer Vision Framework
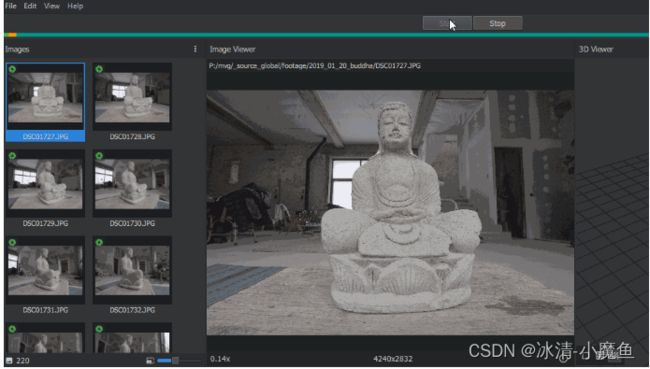
5、meshroom
meshroom是一个基于AliceVision的三维重建软件,可在windows,linux上运行。
源码:mirrors / alicevision / meshroom · GitCode
文档:Meshroom Manual — Meshroom v2021.0.1 documentation