Autonomous_Exploration_Development_Environment的PathFollower学习笔记
1.PathFollow算法简介:
PathFollow算法是路径跟踪算法,是在得到由localplanner算法发布的无碰撞路径话题”/path”中的路径数据start_path(相对于车体坐标系的一系列路径点(101个点)),根据车体与目标之间的角度和距离,控制车辆的速度和角速度,使车辆精准按照路径到达目标点。
通过输入rqt_graph可看到各话题间的关系,Pathfollow算法接收1.来自localplanner发布的/path路径消息(start_path)2.遥控器的消息/jor 3./state_estimate消息(里程计)

2.相关坐标转换


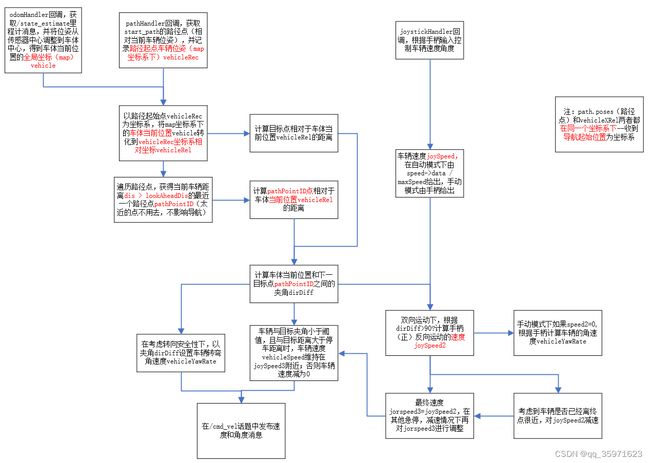
3.算法流程:
4.注释代码:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
//该代码是根据localplanner中选择的路径,进行航路点跟踪
using namespace std;
const double PI = 3.1415926;
double sensorOffsetX = 0;
double sensorOffsetY = 0;
int pubSkipNum = 1;
int pubSkipCount = 0;
bool twoWayDrive = true;
double lookAheadDis = 0.5;
double yawRateGain = 7.5;
double stopYawRateGain = 7.5;
double maxYawRate = 45.0;
double maxSpeed = 1.0;
double maxAccel = 1.0;
double switchTimeThre = 1.0;
double dirDiffThre = 0.1;
double stopDisThre = 0.2;
double slowDwnDisThre = 1.0;
bool useInclRateToSlow = false;
double inclRateThre = 120.0;
double slowRate1 = 0.25;
double slowRate2 = 0.5;
double slowTime1 = 2.0;
double slowTime2 = 2.0;
bool useInclToStop = false;
double inclThre = 45.0;
double stopTime = 5.0;
bool noRotAtStop = false;
bool noRotAtGoal = true;
bool autonomyMode = false;
double autonomySpeed = 1.0;
double joyToSpeedDelay = 2.0;
float joySpeed = 0;
float joySpeedRaw = 0;
float joyYaw = 0;
int safetyStop = 0;
float vehicleX = 0;
float vehicleY = 0;
float vehicleZ = 0;
float vehicleRoll = 0;
float vehiclePitch = 0;
float vehicleYaw = 0;
float vehicleXRec = 0;
float vehicleYRec = 0;
float vehicleZRec = 0;
float vehicleRollRec = 0;
float vehiclePitchRec = 0;
float vehicleYawRec = 0;
float vehicleYawRate = 0;
float vehicleSpeed = 0;
double odomTime = 0;
double joyTime = 0;
double slowInitTime = 0;
double stopInitTime = false;
int pathPointID = 0;
bool pathInit = false;
bool navFwd = true;
double switchTime = 0;
nav_msgs::Path path;
//获取里程计消息回调函数,更新机器人位姿
void odomHandler(const nav_msgs::Odometry::ConstPtr& odomIn)
{
odomTime = odomIn->header.stamp.toSec();//从里程计消息中获取时间戳,并转换为秒。
double roll, pitch, yaw;
geometry_msgs::Quaternion geoQuat = odomIn->pose.pose.orientation;//从里程计消息中提取四元数格式的姿态数据。
tf::Matrix3x3(tf::Quaternion(geoQuat.x, geoQuat.y, geoQuat.z, geoQuat.w)).getRPY(roll, pitch, yaw);//将四元数转换为欧拉角,分别得到滚转(roll)、俯仰(pitch)和偏航(yaw)角
vehicleRoll = roll;
vehiclePitch = pitch;
vehicleYaw = yaw;
vehicleX = odomIn->pose.pose.position.x - cos(yaw) * sensorOffsetX + sin(yaw) * sensorOffsetY;//将点云数据从传感器中心变换到车辆中心
vehicleY = odomIn->pose.pose.position.y - sin(yaw) * sensorOffsetX - cos(yaw) * sensorOffsetY;
vehicleZ = odomIn->pose.pose.position.z;
//滚转角 (roll) 或俯仰角 (pitch) 是超过了一个预设阈值 (inclThre=45),或者收到停车指令useInclToStop进行停车
if ((fabs(roll) > inclThre * PI / 180.0 || fabs(pitch) > inclThre * PI / 180.0) && useInclToStop) {
stopInitTime = odomIn->header.stamp.toSec();//设置停车时间为当前时间,用于后续的实际检测到实际停车的延时判断等
}
//处理车辆的角速度数据,并决定是否初始化减速过程
//车辆的角速度(在X轴和Y轴上,弧度每秒)是否超过了预设的角速率阈值 inclRateThre,或者收到减速指令
if ((fabs(odomIn->twist.twist.angular.x) > inclRateThre * PI / 180.0 || fabs(odomIn->twist.twist.angular.y) > inclRateThre * PI / 180.0) && useInclRateToSlow) {
slowInitTime = odomIn->header.stamp.toSec();//设置减速时间为当前时间,可用于计算从高角速率检测到实际减速的延迟
}
}
//pathHandler 函数是一个 ROS 回调函数,用于处理localplanner传入的路径数据
void pathHandler(const nav_msgs::Path::ConstPtr& pathIn)
{
int pathSize = pathIn->poses.size();//整条路径,路径点数量
path.poses.resize(pathSize);
//复制路径数据
for (int i = 0; i < pathSize; i++) {
path.poses[i].pose.position.x = pathIn->poses[i].pose.position.x;
path.poses[i].pose.position.y = pathIn->poses[i].pose.position.y;
path.poses[i].pose.position.z = pathIn->poses[i].pose.position.z;
}
//vehicleXRec记录路径开始时刻的车辆位置
vehicleXRec = vehicleX;
vehicleYRec = vehicleY;
vehicleZRec = vehicleZ;
vehicleRollRec = vehicleRoll;
vehiclePitchRec = vehiclePitch;
vehicleYawRec = vehicleYaw;
pathPointID = 0;//初始化路径点索引
pathInit = true;
}
//处理来自操纵杆(遥控手柄)的输入。
void joystickHandler(const sensor_msgs::Joy::ConstPtr& joy)
{
joyTime = ros::Time::now().toSec();
joySpeedRaw = sqrt(joy->axes[3] * joy->axes[3] + joy->axes[4] * joy->axes[4]);//使用操纵杆上的轴(axes[3] 和 axes[4])计算原始速度。这通常是通过操纵杆的倾斜程度来实现的。
joySpeed = joySpeedRaw;
if (joySpeed > 1.0) joySpeed = 1.0;
if (joy->axes[4] == 0) joySpeed = 0;
joyYaw = joy->axes[3];//计算操纵杆偏航角yaw
if (joySpeed == 0 && noRotAtStop) joyYaw = 0;
//理仅正向行驶的情况
if (joy->axes[4] < 0 && !twoWayDrive) {//!twoWayDrive仅单向情况下,如果输入手柄速度小于0,将其设置为0
joySpeed = 0;
joyYaw = 0;
}
if (joy->axes[2] > -0.1) {//通过手柄切换手动/导航模式
autonomyMode = false;
} else {
autonomyMode = true;
}
}
//用于处理来自速度主题的消息。函数的目的是在自主模式下,根据接收到的速度数据来调整车辆的速度。
void speedHandler(const std_msgs::Float32::ConstPtr& speed)
{
double speedTime = ros::Time::now().toSec();
//1.导航模式2.检查自上次接收操纵杆输入以来已过了足够的时间3.手柄输入速度为0
if (autonomyMode && speedTime - joyTime > joyToSpeedDelay && joySpeedRaw == 0) {//手柄干扰的判断
joySpeed = speed->data / maxSpeed;//speed->data速度消息中获取速度值,并根据最大速度 maxSpeed 来归一化这个速度值
//速度归一化到0-1
if (joySpeed < 0) joySpeed = 0;
else if (joySpeed > 1.0) joySpeed = 1.0;
}
}
//根据接收到的停止信号来更新车辆的安全停止状态
void stopHandler(const std_msgs::Int8::ConstPtr& stop)
{
safetyStop = stop->data;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "pathFollower");//初始化节点名称
ros::NodeHandle nh;
ros::NodeHandle nhPrivate = ros::NodeHandle("~");
nhPrivate.getParam("sensorOffsetX", sensorOffsetX);//传感器在车辆上的物理偏移
nhPrivate.getParam("sensorOffsetY", sensorOffsetY);
nhPrivate.getParam("pubSkipNum", pubSkipNum);//发布跳过数:?
nhPrivate.getParam("twoWayDrive", twoWayDrive);//车辆是否可以双向运动
nhPrivate.getParam("lookAheadDis", lookAheadDis);//前瞻距离?
nhPrivate.getParam("yawRateGain", yawRateGain);//偏航率增益
nhPrivate.getParam("stopYawRateGain", stopYawRateGain);
nhPrivate.getParam("maxYawRate", maxYawRate);//最大偏航率
nhPrivate.getParam("maxSpeed", maxSpeed);//最大速度
nhPrivate.getParam("maxAccel", maxAccel);//最大加速度
nhPrivate.getParam("switchTimeThre", switchTimeThre);
nhPrivate.getParam("dirDiffThre", dirDiffThre);
nhPrivate.getParam("stopDisThre", stopDisThre);
nhPrivate.getParam("slowDwnDisThre", slowDwnDisThre);
nhPrivate.getParam("useInclRateToSlow", useInclRateToSlow);//是否减速
nhPrivate.getParam("inclRateThre", inclRateThre);//角速度阈值
nhPrivate.getParam("slowRate1", slowRate1);
nhPrivate.getParam("slowRate2", slowRate2);
nhPrivate.getParam("slowTime1", slowTime1);
nhPrivate.getParam("slowTime2", slowTime2);
nhPrivate.getParam("useInclToStop", useInclToStop);
nhPrivate.getParam("inclThre", inclThre);
nhPrivate.getParam("stopTime", stopTime);
nhPrivate.getParam("noRotAtStop", noRotAtStop);
nhPrivate.getParam("noRotAtGoal", noRotAtGoal);
nhPrivate.getParam("autonomyMode", autonomyMode);
nhPrivate.getParam("autonomySpeed", autonomySpeed);
nhPrivate.getParam("joyToSpeedDelay", joyToSpeedDelay);
ros::Subscriber subOdom = nh.subscribe ("/state_estimation", 5, odomHandler);
ros::Subscriber subPath = nh.subscribe ("/path", 5, pathHandler);//获取localplanner发布的path路径消息
ros::Subscriber subJoystick = nh.subscribe ("/joy", 5, joystickHandler);
ros::Subscriber subSpeed = nh.subscribe ("/speed", 5, speedHandler);
ros::Subscriber subStop = nh.subscribe ("/stop", 5, stopHandler);
ros::Publisher pubSpeed = nh.advertise ("/cmd_vel", 5);//将速度发布到cmd_vel中
geometry_msgs::TwistStamped cmd_vel;
cmd_vel.header.frame_id = "vehicle";//cmd_vel的运动话题坐标系是车体坐标系
if (autonomyMode) {//归一化自动模式下的速度
joySpeed = autonomySpeed / maxSpeed;
if (joySpeed < 0) joySpeed = 0;
else if (joySpeed > 1.0) joySpeed = 1.0;
}
ros::Rate rate(100);
bool status = ros::ok();
while (status) {
ros::spinOnce();
if (pathInit) {//是否经过pathHandler进行路径初始化
//vehicleXRel车辆当前位置相对于其在接收到路径时位置的偏移量(相对坐标)
//vehicleX车辆当前的全局X坐标
//vehicleXRec车辆在接收到路径时的全局坐标
float vehicleXRel = cos(vehicleYawRec) * (vehicleX - vehicleXRec) //
+ sin(vehicleYawRec) * (vehicleY - vehicleYRec);
float vehicleYRel = -sin(vehicleYawRec) * (vehicleX - vehicleXRec)
+ cos(vehicleYawRec) * (vehicleY - vehicleYRec);
//算路径终点(path_start中的坐标都是相对起始导航车体)与车辆当前位置的X轴和Y轴差(path.poses和vehicleXRel两者都在同一个坐标系下--收到导航起始位置为坐标系)
int pathSize = path.poses.size();
float endDisX = path.poses[pathSize - 1].pose.position.x - vehicleXRel;
float endDisY = path.poses[pathSize - 1].pose.position.y - vehicleYRel;
float endDis = sqrt(endDisX * endDisX + endDisY * endDisY);
float disX, disY, dis;
while (pathPointID < pathSize - 1) {//遍历路径点
disX = path.poses[pathPointID].pose.position.x - vehicleXRel;//车辆当前位置(考虑相对偏移 vehicleXRel 和 vehicleYRel)与路径点的X轴和Y轴差
disY = path.poses[pathPointID].pose.position.y - vehicleYRel;
dis = sqrt(disX * disX + disY * disY);
if (dis < lookAheadDis) {//如果计算出的距离小于预设的“前瞻距离”(lookAheadDis),
pathPointID++;//则增加 pathPointID +1,跳过下一个路径点(去到>lookAheadDis距离的第一个路径点)
} else {
break;
}
}
//计算要运动过去的下一个路径点(通过lookAheadDis跳过了一部分)的x,y,角度,以及距离
disX = path.poses[pathPointID].pose.position.x - vehicleXRel;
disY = path.poses[pathPointID].pose.position.y - vehicleYRel;
dis = sqrt(disX * disX + disY * disY);
float pathDir = atan2(disY, disX);
//vehicleYaw车辆当前位置相对map的yaw角
//vehicleYawRec车辆在获取路径起点时相对map的yaw角
//pathDir:下一个路径点与当前位置的夹角(以车导航起始时刻为坐标系)
//dirDiff:车体当前位置和目标点之间的夹角(yaw)
float dirDiff = vehicleYaw - vehicleYawRec - pathDir;
//dirDiff角度转换到 -π 到 π 的范围内
if (dirDiff > PI) dirDiff -= 2 * PI;
else if (dirDiff < -PI) dirDiff += 2 * PI;
if (dirDiff > PI) dirDiff -= 2 * PI;
else if (dirDiff < -PI) dirDiff += 2 * PI;
if (twoWayDrive) {//如果可以双向行使
double time = ros::Time::now().toSec();
//如果方向差 (dirDiff) 的绝对值大于90度,且当前是正向行驶(navFwd=true,并且自上次改变方向以来已经超过了一定的时间阈值 (switchTimeThre),则切换到反向行驶
if (fabs(dirDiff) > PI / 2 && navFwd && time - switchTime > switchTimeThre) {
navFwd = false;
switchTime = time;//记录反向行驶时间
} else if (fabs(dirDiff) < PI / 2 && !navFwd && time - switchTime > switchTimeThre) {
navFwd = true;//否则保持原来方向
switchTime = time;
}
}
float joySpeed2 = maxSpeed * joySpeed;//计算出车辆的目标速度(最大速度*比例)
if (!navFwd) {//如果反向行使
dirDiff += PI;//将角度反180度,计算反向行使角度
if (dirDiff > PI) dirDiff -= 2 * PI;//如果调整后的 dirDiff 超出了 -π 到 π 的标准化范围,再次进行标准化
joySpeed2 *= -1;//计算出的速度乘以 -1,以反映反向行驶的实际速度。
}
//自动模式计算车辆的偏航率(vehicleYawRate),为了将车辆yaw角调整到目标点的yaw角
//车辆的速度是否低于一个特定阈值2.0 * maxAccel / 100.0(认为其停止运动), stopYawRateGain 是在低速时使用的偏航率增益,dirDiff 是车辆与目标方向差
if (fabs(vehicleSpeed) < 2.0 * maxAccel / 100.0) vehicleYawRate = -stopYawRateGain * dirDiff;
else vehicleYawRate = -yawRateGain * dirDiff;//在正常速度下,偏航率被设置为 -yawRateGain * dirDiff。这里 yawRateGain 是正常速度下使用的偏航率增益
//限制偏航率范围,保证车辆运动安全
if (vehicleYawRate > maxYawRate * PI / 180.0) vehicleYawRate = maxYawRate * PI / 180.0;
else if (vehicleYawRate < -maxYawRate * PI / 180.0) vehicleYawRate = -maxYawRate * PI / 180.0;
//手动下且操车辆的目标速度 joySpeed2=0。如果是,表示车辆应该原地旋转。
if (joySpeed2 == 0 && !autonomyMode) {
vehicleYawRate = maxYawRate * joyYaw * PI / 180.0;//将偏航率设置为基于操纵杆偏航输入 (joyYaw) 的值
} else if (pathSize <= 1 || (dis < stopDisThre && noRotAtGoal)) {//检查是否路径点非常少(可能意味着没有路径或路径结束了)或者车辆接近路径的终点(dis < stopDisThre),且在达到目标时不应该旋转
vehicleYawRate = 0;//偏航率=0,车辆不会进行旋转
}
if (pathSize <= 1) {//如果路径中的点数小于或等于1,这通常意味着没有有效路径或路径已经走完
joySpeed2 = 0;//(车辆的目标速度)设置为0
} else if (endDis / slowDwnDisThre < joySpeed) {//根据距离终点的距离调整速度,slowDwnDisThre 是一个预设的距离阈值,用于开始减速
joySpeed2 *= endDis / slowDwnDisThre;//随着车辆接近终点,endDis减小,joySpeed2会逐渐减速。
}
float joySpeed3 = joySpeed2;//最终速度
//考虑突发情况,joySpeed3改变
//当前时间 (odomTime) 是否在某个初始减速时间点 (slowInitTime) 加上一个时间间隔 (slowTime1) 之内。
//在某个事件(如倾斜、接近障碍物等)发生后的 slowTime1 时间内,将 joySpeed3(车辆速度)乘以一个减速率 slowRate1,从而减慢车辆
if (odomTime < slowInitTime + slowTime1 && slowInitTime > 0) joySpeed3 *= slowRate1;
else if (odomTime < slowInitTime + slowTime1 + slowTime2 && slowInitTime > 0) joySpeed3 *= slowRate2;//离slowInitTime时间较长时,将速度再次降低(*slowRate2)
//当车辆与目标夹角小于阈值,且与目标距离大于停车距离(车辆正朝着正确的方向前进,并且距离目标点有足够的空间)
if (fabs(dirDiff) < dirDiffThre && dis > stopDisThre) {
if (vehicleSpeed < joySpeed3) vehicleSpeed += maxAccel / 100.0;//如果车辆速度小于(joySpeed3),车辆加速
else if (vehicleSpeed > joySpeed3) vehicleSpeed -= maxAccel / 100.0;//如果车辆当前速度高于目标速度,减少车辆速度
} else {//如果车辆未朝着正确方向或太接近目标点,将车辆速度慢慢调整为0
if (vehicleSpeed > 0) vehicleSpeed -= maxAccel / 100.0;
else if (vehicleSpeed < 0) vehicleSpeed += maxAccel / 100.0;
}
//如果当前时间odomTime在(停车开始stopInitTime+完全停止stopTime)时间内,将车辆速度和角速度都设置为0,进行停车
if (odomTime < stopInitTime + stopTime && stopInitTime > 0) {
vehicleSpeed = 0;
vehicleYawRate = 0;
}
//接收到不同级别的安全停止信号时,确保车辆能够适当地响应。
if (safetyStop >= 1) vehicleSpeed = 0;
if (safetyStop >= 2) vehicleYawRate = 0;
pubSkipCount--;//减少发布跳过计数
if (pubSkipCount < 0) {//如果 pubSkipCount 小于0,表示已经达到了发布新消息的时间
cmd_vel.header.stamp = ros::Time().fromSec(odomTime);//对时,将 cmd_vel 消息的时间戳设置为当前里程计时间 (odomTime)。
if (fabs(vehicleSpeed) <= maxAccel / 100.0) cmd_vel.twist.linear.x = 0;//如果车辆的速度非常小(小于或等于最大加速度的百分之一),则将线速度设置为0,表示车辆停止
else cmd_vel.twist.linear.x = vehicleSpeed;
cmd_vel.twist.angular.z = vehicleYawRate;//将消息的角速度部分设置为当前的偏航率 (vehicleYawRate)
pubSpeed.publish(cmd_vel);
pubSkipCount = pubSkipNum;//重置 pubSkipCount ,以间隔pubSkipNum发布速度消息
}
}
status = ros::ok();
rate.sleep();
}
return 0;
}