Opencv各个模块功能详细简介
本文转自:http://blog.csdn.net/zmdsjtu/article/details/54924727
3.2版本的模块说明:Opencv3.2模块
首先打开opencv_modules.hpp文件,可以看到对于各个功能模块的定义如下:
//功能模块和3.1一样…
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
接着按照上述功能模块对照官方说明进行介绍。
3D相关CALIB3D
全称是Camera Calibration and 3D Reconstruction,也就是所谓的摄像机标定与三维重建。
包括:
1.基本多视角几何算法
2.单立体摄像机标定
3.物体位姿估计
4.三维重建要素
- 1
- 1
最基础部分CORE
定义了Opencv最为基础的数据结构,是一个内容非常详实与紧凑的模块。
包括了:
1.最基础的结构体
Basic Structures
Basic C Structures and Operations
2.动态结构(Opencv1用得多,新版的不需要关注这些,利用std::vector或其他更高级的结构即可)
Dynamic Structures
3.数组操作,包括了abs,absdiff,add,addWeighted,bitwise_and….等等一些列的数组操作运算
详情见地址:官方说明文档//有空或许会把这个写一篇博客……
Operations on Arrays
4.绘画的功能,画点,线,圆,椭圆,方框等等……
Drawing Functions
5.XML/YAML文件进行存储或调用Opencv的各种数据结构,我之前有篇博客进行表情识别的时候就利用了XML进行特征的提取,还是非常方便的,XML的使用案例
XML/YAML Persistence
XML/YAML Persistence (C API)
6.聚类:K-Mean聚类以及分割的API
Clustering
7.辅助功能与系统函数和宏
Utility and System Functions and Macros
8.OpenGL交互相关
OpenGL interoperability
首先想进行交互需要自己编译Opencv把OPENGL的状态设置为ON。2.4版本的只支持基于windows或linux的win32,GTK,Qt的组合……安卓和macOS的不支持…
更为详细的信息见链接:
OpenCV+OpenGL2.4版本
OpenCV+OpenGL3.2版本
—————————–3.2与2.4相比增添的内容:
1.Intel IPP Asynchronous C/C++ Converters
2.Optimization Algorithms
3.DirectX interoperability
4.Eigen support
5.OpenCL support:仅限Linux使用
6.Intel VA-API/OpenCL (CL-VA) interoperability
7.Hardware Acceleration Layer
- 1
- 1
2D特征FEATURES2D
显著的特征描述符,描述符匹配器和探测器,包括以下几块内容:
1.特征的检测以及描述:包括Fast算法,MSER,ORB,BRISK,FREAK
Feature Detection and Description
2.特征检测器的接口
Common Interfaces of Feature Detectors
3.描述符提取器的接口
Common Interfaces of Descriptor Extractors
4.描述符匹配器的接口
Common Interfaces of Descriptor Matchers
5.通用描述符匹配器的接口
Common Interfaces of Generic Descriptor Matchers
6.关键点以及匹配的绘制函数
Drawing Function of Keypoints and Matches
7.物体分类:这是基于local 2D features的物体分类,有BOW训练器以及BOW分类器两个模块
Object Categorization
—————3.2里本质一样,分类看上去更为清爽一点:
Feature Detection and Description
Descriptor Matchers
Drawing Function of Keypoints and Matches
Object Categorization
近邻搜索FLANN
FLANN库全称是Fast Library for Approximate Nearest Neighbors,它是目前最完整的(近似)最近邻开源库。不但实现了一系列查找算法,还包含了一种自动选取最快算法的机制。 摘自:FLANN使用说明
主要分为:
1.快速近似最近邻搜索FLANN
2.聚类Clustering
高层级的交互HIGHGUI
High-level GUI and Media I/O 高层级的用户交互以及媒体的IO接口,主要包括以下几个方面:
1.用户交互:包括显示图片,窗口的操作,鼠标的操作等等。
2.读写图片或者视频:顾名思义就是对于图片或者视频的一些列操作。
3.Qt新功能://这个之后一定要试试,使用说明地址或者Opencv3.2的使用说明
结合Qt可以弄成类似于MFC的有按钮等等功能的界面,大致如下:

—————–3.2与2.4相比在highgui多了OpenGL的支持模块,详细功能函数如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
图片的读写IMGCODECS
用于图片的读写。//2.4里没有这块
OpenCV3开始图片、视频编解码从highgui模块分离出来,组成了imgcodecs和videoio。Linux环境下需要注意一下,其他没啥。
图片的处理IMGPROC
1.图像滤波Image Filtering:线性和非线性,Sobel,Smooth等等一些列实用的功能函数
详细介绍如下(如果感兴趣的话):
Functions and classes described in this section are used to perform various linear or non-linear filtering operations on 2D images (represented as Mat’s). It means that for each pixel location (x,y) in the source image (normally, rectangular), its neighborhood is considered and used to compute the response. In case of a linear filter, it is a weighted sum of pixel values. In case of morphological operations, it is the minimum or maximum values, and so on. The computed response is stored in the destination image at the same location (x,y). It means that the output image will be of the same size as the input image. Normally, the functions support multi-channel arrays, in which case every channel is processed independently. Therefore, the output image will also have the same number of channels as the input one.
Another common feature of the functions and classes described in this section is that, unlike simple arithmetic functions, they need to extrapolate values of some non-existing pixels. For example, if you want to smooth an image using a Gaussian 3×3 filter, then, when processing the left-most pixels in each row, you need pixels to the left of them, that is, outside of the image. You can let these pixels be the same as the left-most image pixels (“replicated border” extrapolation method), or assume that all the non-existing pixels are zeros (“constant border” extrapolation method), and so on. OpenCV enables you to specify the extrapolation method. For details, see cv::BorderTypes
2.图像的几何变换Geometric Image Transformations:
这一部分提供2D图像的很多几何变换操作,例如非常实用的Resize等等。
3.各种图片形式的转换Miscellaneous Image Transformations:
提供threshold,cvtColor等等12个功能函数
4.直方图Histograms
提供便于计算的一些接口
5.结构分析和形状描述Structural Analysis and Shape Descriptors:
计算所有多边形或者栅格化形状的特证矩moment,例如可以提取下图的手的凸陷部分://看着非常实用的感觉

6.动作分析以及物体追踪Motion Analysis and Object Tracking:
顾名思义……
7.特征检测Feature Detection
(找边界)canny
(找角)cornerEigenValsAndVecs,cornerHarris,cornerMinEigenVal,cornerSubPix,(预处理)preCornerDetect
goodFeaturesToTrack
(找圆)HoughCircles
(找线)HoughLines,HoughLinesP
8.物体检测Object Detection
就是模板匹配
——–3.2与2.4相比增添了以下内容:
1.Drawing Functions绘画的功能:
最实用的应该就是透明背景了吧,通过Scalar增加alpha位,之前所有的画圆,方,点线面的函数都可以直接调用cv::某个函数()在颜色位加上最后一位来实现半透明的效果。
- 1
- 1
2.给灰度图重新上色ColorMaps in OpenCV
功能函数为:void cv::applyColorMap (InputArray src, OutputArray dst, int colormap)
附上颜色对照表

3.平面细分Planar Subdivision
cv::Subdiv2D
用于三维定位等等…
4.C API
5.Hardware Acceleration Layer
机器学习ML
Machine Learning机器学习模块,基本就是统计学上回归,分类以及聚类的,大致分为以下几个部分:
1.统计模型Statistical Models
2.一般贝叶斯分类器Normal Bayes Classifier
3.K-近邻K-Nearest Neighbors
4.支持向量机SVM Support Vector Machines:之前尝试过的案例:SVM案例
5.决策树Decision Trees
6.级联分类器Boosting
7.梯度树Gradient Boosted Trees
8.随机树Random Trees
9.超随机树Extremely randomized trees
10.期望最大化Expectation Maximization
11.神经网络Neural Networks
12.机器学习数据的形式相关MLData
如何训练以及使用见地址:机器学习官方说明
————-3.2与2.4相比新增内容
1.Logistic Regression:类似于SVM也是一种多分类器
物体检测OBJDETECT
物体检测
Opencv2.4包含Cascade Classification(级联分类)和Latent SVM这两个部分
Opencv3.2所采用的方法为
Haar Feature-based Cascade Classifier for Object Detection
图像降噪克隆与NPR渲染PHOTO
也就是 Computational Photography,Opencv2.4包括以下两个部分:
1.图像修复Inpainting
- 1
- 1
2.图像降噪Denoising
———–Opencv3.2模块
1.降噪Denoising相比于2.4功能函数更多了
2.高范围动态成像HDR imaging利用HDR算法,有一系列相关的算法函数……2.4里并没有
3.无缝克隆Seamless Cloning
如图,强大一览无余,图片摘自vsooda的博客

4.非真实感渲染Non-Photorealistic Rendering
看名字很玄乎……大概动画里用得很多,把一个图片渲染得不像真的,如图所示,左侧为一般渲染,右侧为NPR渲染(摘自维基百科)

5.C API
形状的匹配以及距离计算SHAPE
Shape Distance and Matching,形状的距离以及匹配
//对这部分了解不是很多,只能形而上学地复制过来了
Opencv3特有的部分,Opencv2.4并没有…
1. AffineTransformer仿射变换算法的包装类
2. HistogramCostExtractor
3. HausdorffDistanceExtractor
4. ShapeContextDistanceExtractor
5. ThinPlateSplineShapeTransformer
图像拼接STITCHING
图像拼接模块,流程如下,可以去掉或者单独使用其中某些模块。

主要包括以下内容:
1.拼接管道Stitching Pipeline
2.特征点提取以及图片匹配Features Finding and Images Matching
3.旋转估计Rotation Estimation
4.自动校准Autocalibration
5.图片倾斜旋转相关的包Images Warping
6.缝隙估计Seam Estimation
7.曝光补偿Exposure Compensation
8.图片混合Image Blenders
超分辨率SUPERRES
Super Resolution,包含了一系列的超分辨率问题的处理方法
//对这边毫无了解,只能先形而上学……
视频分析VIDEO
Video Analysis视频分析,包括以下两块内容:
1.动作分析Motion Analysis
2.物体追踪Object Tracking
视频读写VIDEOIO
OpenCV3特有的仅用来读写视频的模块
视频稳定系VIDEOSTAB
Video Stabilization、视频稳定模块包含一组可以用来解决视频稳定问题的函数和类。2.4基本没提及,3.2里内容比较详实。包括以下两个内容:
1.全局运动估计Global Motion Estimation
包括一些列功能和类用以进行两张图或者两个点云阵的全局动作估计。功能函数都被封装成了类。
2.快速步进法Fast Marching Method
打包WORLD
终于到最后一个了,这是Opencv3特有的,把所有东西打包在一个dll里,配置环境的时候很方便,具体工程实际就要分情况了。
最后放上Opencv3.2以及Opencv2.4模块的对比图方便调用:
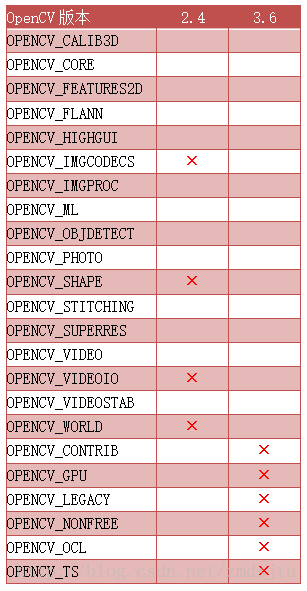
其中Opencv2.4特有的几个模块功能说明如下:
//参考了易术军的博客
OPENCV_CONTRIB:也就是Contributed/Experimental Stuf的缩写, 该模块包含了一些最近添加的不太稳定的可选功能,不用去多管。2.4.8里的这个模块有新型人脸识别,立体匹配,人工视网膜模型等技术。
OPENCV_GPU:运用GPU加速的计算机视觉模块
OPENCV_LEGACY:一些已经废弃的代码库,保留下来作为向下兼容,3里以及全部删除。
OPENCV_NONFREE: 也就是一些具有专利的算法模块 ,包含特征检测和GPU相关的内容,在3里删去了。
OPENCV_OCL :即OpenCL-accelerated Computer Vision,运用OpenCL加速的计算机视觉组件模块,在3里整个并入了Core.
OPENCV_TS:测试用。