Unet+ResNet 实战分割项目、多尺度训练、多类别分割
1. 介绍
传统的Unet网络,特征提取的backbone采用的是vgg模型,vgg的相关介绍和实战参考以前的博文:pytorch 搭建 VGG 网络
VGG 的特征提取能力其实是不弱的,但网络较为臃肿,容易产生梯度消失或者梯度爆炸的问题。而Resnet 可以解决这一问题,参考:ResNet 训练CIFAR10数据集,并做图片分类
本章在之前文章的基础上,只是将Unet的backbone进行替换,将vgg换成了resnet而已,其余的代码完全没变,可以参考昨天的博文:Unet 实战分割项目、多尺度训练、多类别分割
项目目录:
- 粉色框为数据和待推理的数据
- 黄色框是代码训练生成的训练过程的信息。包括最好的权重(pth文件)、学习率下降曲线图片、包含超参数以及各个类别的recall、precision、iou的训练日志txt文件等等
- 蓝色框为代码

2. 对比试验
Resnet 和 Vgg 作为unet backbone的对比实验。不同的项目中,除了model.py代码更换,其余的超参数、数据均未改动
2.1 Drive 数据集
Drive 数据集介绍:UNet 网络做图像分割DRIVE数据集
Drive 数据集为二分割任务
2.1.1 loss 和 mean iou 曲线对比

上图为vgg,下图为resnet,好像区别不大...
2.1.2 训练日志对比
上图为vgg,下图为resnet
其中,每个列表索引是分类的类别,二值分割只有0 和255,所以每个列表只有两个元素


区别确实不大....
2.2 腹部多脏器MRI 数据集
腹部多脏器MRI 数据集介绍:腹部MRI多脏器分割(多个类别的分割)
腹部多脏器MRI 数据集为5类别分割:背景:0,Liver: 63 ,Right kidney: 126 ,Left kidney: 189 ,Spleen: 252
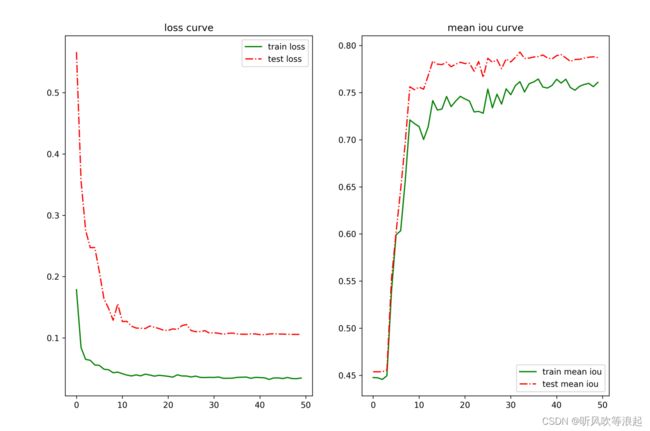
2.2.1 loss 和 mean iou 曲线对比


上图为vgg,下图为resnet
这个提升的很明显,resnet作为unet backbone 的分割iou到了0.84左右。而vgg作为backbone仅有0.76左右
2.2.2 训练日志对比
上图为vgg,下图为resnet
其中,每个列表索引是分类的类别

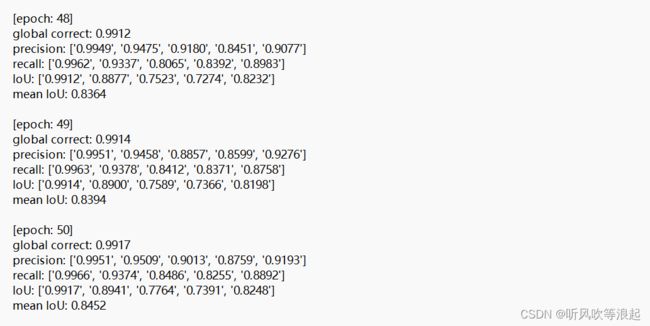
可以看出,无论哪个类别的iou均有显著提升
3. 代码
model.py 代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
class Up(nn.Module): # 将x1上采样,然后调整为x2的大小
"""Upscaling then double conv"""
def __init__(self):
super().__init__()
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
def forward(self, x1, x2):
x1 = self.up(x1) # 将传入数据上采样,
diffY = torch.tensor([x2.size()[2] - x1.size()[2]])
diffX = torch.tensor([x2.size()[3] - x1.size()[3]])
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2]) # 填充为x2相同的大小
return x1
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channels, out_channels, stride=1):
super().__init__()
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * BasicBlock.expansion, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != BasicBlock.expansion * out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * BasicBlock.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class BottleNeck(nn.Module):
expansion = 4
'''
espansion是通道扩充的比例
注意实际输出channel = middle_channels * BottleNeck.expansion
'''
def __init__(self, in_channels, middle_channels, stride=1):
super().__init__()
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, middle_channels, kernel_size=1, bias=False),
nn.BatchNorm2d(middle_channels),
nn.ReLU(inplace=True),
nn.Conv2d(middle_channels, middle_channels, stride=stride, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(middle_channels),
nn.ReLU(inplace=True),
nn.Conv2d(middle_channels, middle_channels * BottleNeck.expansion, kernel_size=1, bias=False),
nn.BatchNorm2d(middle_channels * BottleNeck.expansion),
)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != middle_channels * BottleNeck.expansion:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, middle_channels * BottleNeck.expansion, stride=stride, kernel_size=1,
bias=False),
nn.BatchNorm2d(middle_channels * BottleNeck.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class VGGBlock(nn.Module):
def __init__(self, in_channels, middle_channels, out_channels):
super().__init__()
self.first = nn.Sequential(
nn.Conv2d(in_channels, middle_channels, 3, padding=1),
nn.BatchNorm2d(middle_channels),
nn.ReLU()
)
self.second = nn.Sequential(
nn.Conv2d(middle_channels, out_channels, 3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU()
)
def forward(self, x):
out = self.first(x)
out = self.second(out)
return out
# unet+resnet 可以更换 layers
class UResnet(nn.Module):
def __init__(self, num_classes, input_channels=3,block=BasicBlock,layers=[3,4,6,3]):
super().__init__()
nb_filter = [64, 128, 256, 512, 1024]
self.Up = Up()
self.in_channel = nb_filter[0]
self.pool = nn.MaxPool2d(2, 2)
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
self.conv0_0 = VGGBlock(input_channels, nb_filter[0], nb_filter[0])
self.conv1_0 = self._make_layer(block, nb_filter[1], layers[0], 1)
self.conv2_0 = self._make_layer(block, nb_filter[2], layers[1], 1)
self.conv3_0 = self._make_layer(block, nb_filter[3], layers[2], 1)
self.conv4_0 = self._make_layer(block, nb_filter[4], layers[3], 1)
self.conv3_1 = VGGBlock((nb_filter[3] + nb_filter[4]) * block.expansion, nb_filter[3],
nb_filter[3] * block.expansion)
self.conv2_2 = VGGBlock((nb_filter[2] + nb_filter[3]) * block.expansion, nb_filter[2],
nb_filter[2] * block.expansion)
self.conv1_3 = VGGBlock((nb_filter[1] + nb_filter[2]) * block.expansion, nb_filter[1],
nb_filter[1] * block.expansion)
self.conv0_4 = VGGBlock(nb_filter[0] + nb_filter[1] * block.expansion, nb_filter[0], nb_filter[0])
self.final = nn.Conv2d(nb_filter[0], num_classes, kernel_size=1)
def _make_layer(self, block, middle_channel, num_blocks, stride):
'''
middle_channels中间维度,实际输出channels = middle_channels * block.expansion
num_blocks,一个Layer包含block的个数
'''
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.in_channel, middle_channel, stride))
self.in_channel = middle_channel * block.expansion
return nn.Sequential(*layers)
def forward(self, input):
x0_0 = self.conv0_0(input)
x1_0 = self.conv1_0(self.pool(x0_0))
x2_0 = self.conv2_0(self.pool(x1_0))
x3_0 = self.conv3_0(self.pool(x2_0))
x4_0 = self.conv4_0(self.pool(x3_0))
x3_1 = self.conv3_1(torch.cat([x3_0, self.Up(x4_0, x3_0)], 1))
x2_2 = self.conv2_2(torch.cat([x2_0, self.Up(x3_1, x2_0)], 1))
x1_3 = self.conv1_3(torch.cat([x1_0, self.Up(x2_2, x1_0)], 1))
x0_4 = self.conv0_4(torch.cat([x0_0, self.Up(x1_3, x0_0)], 1))
output = self.final(x0_4)
return output
4. 下载
深度学习Unet+Resnet实战分割项目、多尺度训练、多类别分割:腹部多脏器5类别分割数据集资源-CSDN文库
深度学习Unet+Resnet实战分割项目、多尺度训练、多类别分割:DRIVE视神经分割数据集资源-CSDN文库