跨进程通信使用 Zenoh中间件 进行高效数据传输的测试和分析
文章目录
-
- 1. 引言
- 2. Zenoh C++ 使用指南
-
- 2.1 安装 Zenoh C++ 库
- 2.2 编写基本的 Zenoh C++ 程序
-
- 订阅示例
- 发布示例
- 2.3 编译和运行程序
- 3. Zenoh 与 ROS2 集成
-
- 3.1 安装 Zenoh
- 3.2 安装 ROS2 的 Zenoh RMW 实现
- 3.3 设置 RMW 实现为 Zenoh
- 3.4 验证配置
- 4. 编写基于 Zenoh 的 ROS2 应用程序
-
- 4.1 发布者节点
- 4.2 订阅者节点
- 5. ROS2跨进程通信性能测试
-
- 5.1 吞吐量测试 (throughput_in_message_per_second)
- 5.2 延迟测试 (us)
- 6. 参考文章
1. 引言
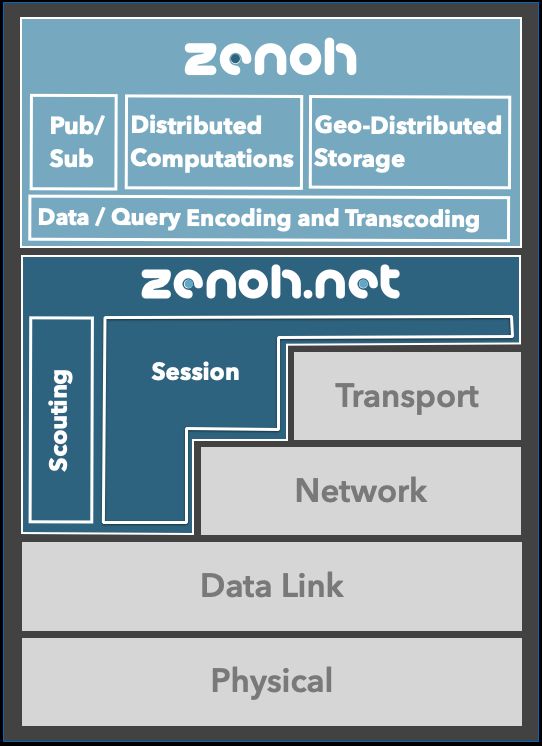
Zenoh 是一个高效的数据传输框架,核心由 Rust 编写,同时提供了 C++、Python 等多种语言绑定。支持多种部署环境和跨网络通信,实现了去中心化的自适应网络发现,最小的协议网络开销,能够满足低延迟和高吞吐量的要求,甚至它内部也实现了IPC(zero copy)。
本文将探讨如何在 C++ 环境下使用 Zenoh 进行数据传输,并讨论 Zenoh 与 ROS2 的集成方式。
2. Zenoh C++ 使用指南
2.1 安装 Zenoh C++ 库
首先,获取并安装 Zenoh C++ 库:
# 获取 zenoh-cpp 库
git clone https://github.com/eclipse-zenoh/zenoh-cpp.git
cd zenoh-cpp
# 安装依赖并构建
mkdir build && cd build
cmake ..
make
sudo make install
2.2 编写基本的 Zenoh C++ 程序
一个基本的 Zenoh C++ 程序包括以下步骤:
- 初始化 Zenoh 会话。
- 发布或订阅数据。
- 处理数据。
订阅示例
#include 发布示例
#include 2.3 编译和运行程序
编译时需要链接 Zenoh 库:
g++ -std=c++17 -o zenoh_example zenoh_example.cpp -lzenoh
然后运行程序:
./zenoh_example
3. Zenoh 与 ROS2 集成
Zenoh 提供了一个轻量级且高效的消息传输机制,能够满足低延迟、高吞吐量的要求。通过 Zenoh 作为 ROS2 的 RMW (ROS Middleware) 实现,开发者可以实现跨网络的高效通信。Zenoh 的架构分为核心通信引擎和不同语言的绑定接口,其中核心由 Rust 编写,C++ 和 Python 绑定则为主流语言提供支持。
在 ROS2 中,使用 Zenoh 的典型步骤包括:
- 安装 Zenoh 和 ROS2 的 Zenoh RMW 实现。
- 配置 ROS2 使用 Zenoh 作为默认中间件。
- 编写基于 Zenoh 的 ROS2 应用程序。
要实现 Zenoh 与 ROS2 的集成,可以按照以下步骤进行详细配置和开发:
3.1 安装 Zenoh
Zenoh 的核心库可以通过以下命令安装:
git clone https://github.com/eclipse-zenoh/zenoh.git
cd zenoh
cargo build --release
Zenoh 的核心是用 Rust 编写的,因此需要安装 Rust 和 Cargo。如果还未安装,可以通过以下命令安装:
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
3.2 安装 ROS2 的 Zenoh RMW 实现
ROS2 默认支持多种 RMW(ROS Middleware)实现,Zenoh 也可以作为其中之一使用。你需要安装 rmw_zenoh 和 rmw_zenoh_cpp:
git clone https://github.com/eclipse-zenoh/zenoh-plugin-dds.git
cd zenoh-plugin-dds
cargo build --release
然后,可以将编译好的库添加到 ROS2 的路径中。
3.3 设置 RMW 实现为 Zenoh
在运行 ROS2 节点时,可以通过以下命令将 RMW_IMPLEMENTATION 设置为 rmw_zenoh_cpp:
export RMW_IMPLEMENTATION=rmw_zenoh_cpp
也可以在 .bashrc 文件中添加此命令,以便每次启动终端时自动配置。
3.4 验证配置
通过以下命令验证 Zenoh 是否已作为 ROS2 的默认中间件:
ros2 doctor --report
输出中应显示 RMW_IMPLEMENTATION: rmw_zenoh_cpp。
4. 编写基于 Zenoh 的 ROS2 应用程序
在 ROS2 中,你可以按照常规方式编写节点,Zenoh 的集成是透明的。以下是一个使用 Zenoh 的发布者和订阅者示例:
4.1 发布者节点
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("zenoh_publisher");
auto publisher = node->create_publisher<std_msgs::msg::String>("zenoh_topic", 10);
rclcpp::WallRate loop_rate(1);
while (rclcpp::ok()) {
auto message = std_msgs::msg::String();
message.data = "Hello from Zenoh Publisher!";
RCLCPP_INFO(node->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher->publish(message);
rclcpp::spin_some(node);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
4.2 订阅者节点
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
void topic_callback(const std_msgs::msg::String::SharedPtr msg) {
RCLCPP_INFO(rclcpp::get_logger("zenoh_subscriber"), "I heard: '%s'", msg->data.c_str());
}
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("zenoh_subscriber");
auto subscription = node->create_subscription<std_msgs::msg::String>(
"zenoh_topic", 10, topic_callback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
这些节点编写完成后,使用常规的 ROS2 编译工具如 colcon 进行编译:
colcon build
确保在运行时,环境变量 RMW_IMPLEMENTATION 设置为 rmw_zenoh_cpp,然后可以启动发布者和订阅者:
ros2 run <package_name> zenoh_publisher
ros2 run <package_name> zenoh_subscriber
5. ROS2跨进程通信性能测试
为了评估 Zenoh 的性能,我们按照以上方法进行了ROS2跨进程通信的吞吐量和延迟测试,测试数据如下:
5.1 吞吐量测试 (throughput_in_message_per_second)
| count | 1kb (bytes) | 2kb(bytes) | 4kb(bytes) | 8kb(bytes) | 16kb(bytes) |
|---|---|---|---|---|---|
| 1 | 258643.170 | 172798.709 | 119124.435 | 90914.272 | 79555.248 |
| 2 | 261220.364 | 166884.978 | 112133.029 | 87834.264 | 79053.264 |
| 3 | 252042.470 | 157376.734 | 111920.862 | 96717.972 | 78143.373 |
| 4 | 276926.169 | 156251.875 | 110722.081 | 89124.870 | 75229.330 |
| 5 | 261305.844 | 164742.864 | 118617.884 | 98019.081 | 76151.792 |
- 随着消息大小增加,吞吐量逐渐降低。小消息(如1KB)的传输速率最高,约为25万条/秒,而大消息(如16KB)的吞吐量则降至约7.5万条/秒。
- 消息大小对吞吐量影响显著,较大消息由于传输开销增加,导致吞吐能力下降。
5.2 延迟测试 (us)
| count | 1kb (us) | 2kb(us) | 4kb(us) | 8kb(us) | 16kb(us) |
|---|---|---|---|---|---|
| 1 | 67 | 58 | 65 | 64 | 97 |
| 2 | 96 | 69 | 58 | 71 | 76 |
| 3 | 82 | 62 | 65 | 63 | 86 |
| 4 | 68 | 66 | 58 | 71 | 80 |
| 5 | 104 | 60 | 64 | 62 | 89 |
- 不同消息大小的延迟相对稳定。小消息(如1KB)的延迟在 67-104 微秒之间,而大消息(如16KB)的延迟在 76-97 微秒之间。
- 延迟随消息大小略有波动,但整体表现较好,能够满足大多数低延迟应用场景的需求。
结论:Zenoh 在跨进程通信中表现出较高的吞吐量和低延迟特性。对于小消息,Zenoh 可以在确保低延迟的同时实现高吞吐量。虽然大消息的吞吐量有所降低,但仍保持了较低的延迟,展示出良好的通信性能。这使得 Zenoh 适合在低延迟和高性能要求的应用中使用,尤其是在分布式系统中。
6. 参考文章
eclipse zenoh 助力雾计算和边缘计算