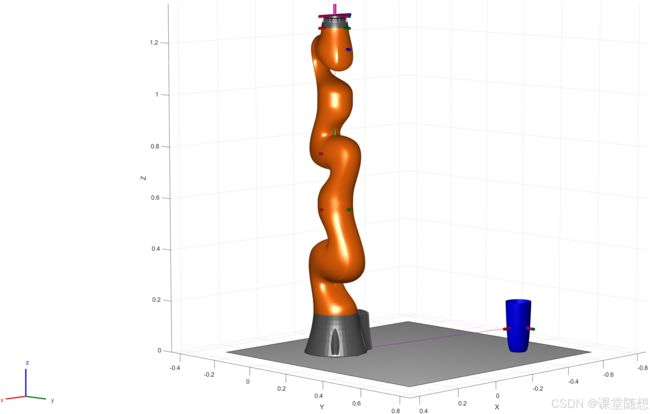
通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹
% 创建用于视觉化杯子的点
[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);
% 调整 Z 坐标的比例,使其符合杯子的高度
Z = cupHeight*Z - cupHeight/2;
% 将杯子的位置平移到指定位置
X = X + cupPosition(1);
Y = Y + cupPosition(2);
Z = Z + cupPosition(3);
% 将杯子添加到图形中,并配置照明
s = patch(surf2patch(X,Y,Z));
s.FaceColor = 'blue'; % 设置杯子的颜色为蓝色
s.FaceLighting = 'gouraud'; % 设置照明效果为 Gouraud 渲染
s.EdgeAlpha = 0; % 将边缘透明度设置为 0
% 移动光源的位置,使杯子的侧面被照亮
lightObj = findobj(gca,'Type','Light');
for i = 1:length(lightObj)
lightObj(i).Position = [1,1,1];
end
Y-Z视图
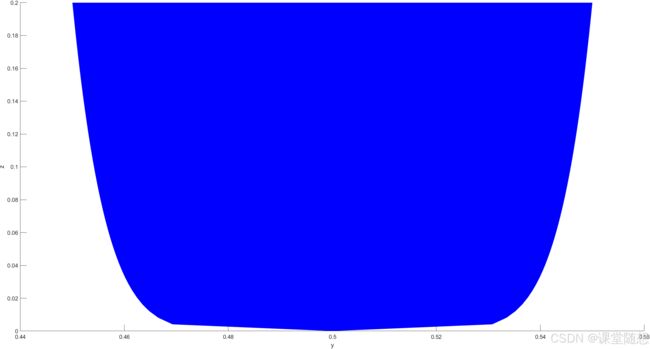
[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);
这行代码用于生成表示一个具有非标准形状的圆柱体(在本例中是杯子)的三维坐标点。具体来说,它通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,然后对这些坐标进行一定的处理,以实现独特的形状效果。
逐步解释:
-
linspace(0,1,50):- 生成从 0 到 1 之间的 50 个等间距的数值。
- 这些数值表示圆柱体沿径向(半径方向)的分布,用于生成圆柱体的外形。
-
linspace(0,1,50).^0.125:- 对生成的 50 个数值进行 0.125 次幂运算。
- 幂次操作:幂次小于 1的幂次操作会导致数值在靠近 0 的部分变化较快,而在接近 1 的部分变化较慢,表现为更“平缓”的增长曲线。
-
cupRadius*linspace(0,1,50).^0.125:- 将计算出的半径值乘以
cupRadius,以生成实际的杯子半径。 - 这一步将非线性调整的半径值缩放到实际的杯子尺寸。
- 将计算出的半径值乘以
-
cylinder(cupRadius*linspace(0,1,50).^0.125):cylinder函数使用给定的半径值生成一个圆柱体的三维坐标点。cylinder函数默认生成一个高为 1,底部在 z=0,顶部在 z=1 的圆柱体,其参数是圆柱体各层的半径。通过这种方式,生成的圆柱体会有一个非线性收缩的效果,导致生成的形状在底部较窄,而在顶部逐渐变宽,更接近实际杯子的形状。
-
[X, Y, Z]:cylinder函数输出三个矩阵X、Y和Z,它们分别表示圆柱体表面的 x、y 和 z 坐标。- 这些矩阵可以直接用于绘制圆柱体的表面,表示杯子的三维形状。
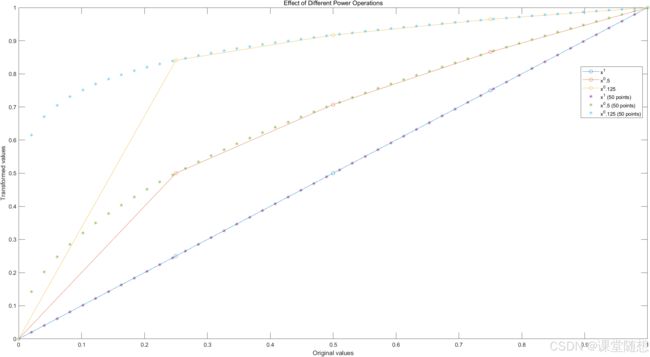
幂次操作演示
clear;clc;close all;
x = linspace(0, 1, 5); % 生成 0 到 1 之间的 5 个等间距数值
% 不同幂次操作
y1 = x .^ 1; % 线性,不做幂次操作,[0, 0.25, 0.5, 0.75, 1]
y2 = x .^ 0.5; % 平方根,进行 0.5 次幂的操作,[0, 0.5, 0.7071, 0.866, 1]
y3 = x .^ 0.125; % 进行 0.125 次幂的操作%,[0, 0.861, 0.9306, 0.9715, 1]
% 绘制第一组曲线
plot(x, y1, '-o', 'DisplayName', 'x^1'); hold on;
plot(x, y2, '-o', 'DisplayName', 'x^0.5');
plot(x, y3, '-o', 'DisplayName', 'x^0.125');
legend show;
xlabel('Original values');
ylabel('Transformed values');
title('Effect of Different Power Operations');
% 生成 0 到 1 之间的 50 个等间距数值
x_fine = linspace(0, 1, 50);
% 对新的数值集进行相同的幂次操作
y1_fine = x_fine .^ 1;
y2_fine = x_fine .^ 0.5;
y3_fine = x_fine .^ 0.125;
% 绘制第二组曲线
plot(x_fine, y1_fine, '*', 'DisplayName', 'x^1 (50 points)'); hold on;
plot(x_fine, y2_fine, '*', 'DisplayName', 'x^0.5 (50 points)');
plot(x_fine, y3_fine, '*', 'DisplayName', 'x^0.125 (50 points)');
legend show;
1. cylinder 函数的基本用法
[X, Y, Z] = cylinder(r, n):
r是一个向量,定义了圆柱体的半径分布。如果r是一个标量,则生成的圆柱体的横截面是一个固定半径的圆。否则,r的每个元素定义了从底部到顶部的不同半径。n是圆柱体的侧面点数,表示圆周上生成的点的数量。默认值为 20。
cylinder 函数生成的 X、Y、Z 是网格化的数据,这些数据表示圆柱体的表面。X 和 Y 是圆柱体表面的横截面点的 x 和 y 坐标,Z 是圆柱体的高度分布。
2. 解释 X 的大小
[X, Y, Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);
-
cupRadius*linspace(0,1,50).^0.125:这个表达式生成了一个长度为 50 的向量r,表示圆柱体从底部到顶部的半径变化。linspace(0,1,50)创建了一个从 0 到 1 之间均匀分布的 50 个点。- 然后,这些点被提升到
0.125次幂,以实现非线性的半径分布。 - 之后,乘以
cupRadius以获得实际的半径大小。
-
cylinder(r):此时,r是一个长度为 50 的向量,因此cylinder函数会生成一个圆柱体,其横截面在 Z 方向上变化,形成了 50 个横截面(代表圆柱体从底部到顶部的 50 个切片)。 -
默认的
n值为 20:cylinder函数默认在圆周上生成 21 个点(包括 0 度和 360 度位置,重复了一次,以便闭合圆周)。
3. X 的大小分析
- 50 行:代表了圆柱体沿 Z 轴方向上的 50 个切片。
- 21 列:代表了圆柱体每个横截面上生成的 21 个点。
因此,X 的大小为 50x21,这意味着有 50 个高度切片,每个切片上有 21 个点,构成圆柱体表面的坐标点。
总结
- 行数 50:指定的
r向量的长度(50 个切片)。 - 列数 21:
cylinder默认在圆周上生成 21 个点,以形成完整的圆柱体表面。